
 商标分类
商标分类  商标转让
商标转让 
附加制动器及自动扶梯或自动人行道的制作方法
 2021-02-20 05:02:06|
2021-02-20 05:02:06| 422|
422| 起点商标网
起点商标网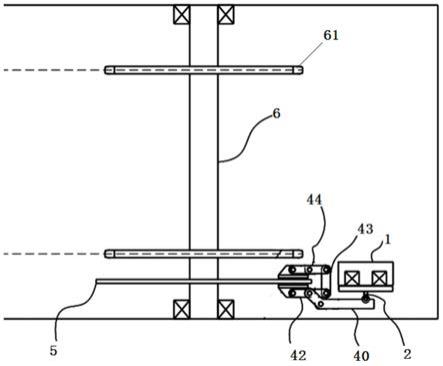
[0001]
本发明涉及自动扶梯或自动人行道技术,尤其是一种附加制动器及具有该附加制动器的自动扶梯或自动人行道。
背景技术:
[0002]
自动扶梯或自动人行道是一种带有循环运行梯级或踏板,用于上下或水平输送乘客的固定电力驱动设备,其具有连续工作,运输量大的特点,广泛用于人流量大的地铁、车站、商场等公共场所。
[0003]
自动扶梯(escalator)是带有循环运行梯级,用于向上或向下倾斜输送乘客的固定电力驱动设备。自动扶梯由梯路(变型的板式输送机)和两旁的扶手(变形的带式输送机)组成。其主要部件有梯级、牵引链条及链轮、导轨系统、主传动系统(包括电动机、减速装置、制动器及中间传动环节等)、驱动主轴、梯路张紧装置、扶手系统、梳板、扶梯桁架和电气系统等。梯级在乘客入口处作水平运动(方便乘客登梯),以后逐渐形成阶梯;在接近出口处阶梯逐渐消失,梯级再度作水平运动。这些运动都是由梯级主轮、副轮分别沿不同的梯级导轨行走来实现的。
[0004]
自动人行道(moving walk)是指带有循环运行走道,用于水平或倾斜角不大于12
°
输送乘客的固定电力驱动设备。结构与自动扶梯相似,主要由活动踏面和扶手两部分组成。通常,其活动踏面在倾斜情况下也不形成阶梯状。按结构形式可分为踏板式自动人行道(乘客站立的踏面为金属或其他材料制作的表面带齿槽的板块的自动人行道,类似板式输送机)、胶带式自动人行道(乘客站立的踏面为表面覆有橡胶层的连续钢带的自动人行道,类似带式输送机)。
[0005]
根据gb 16899-2011《自动扶梯和自动人行道的制造与安装安全规范》关于附加制动器的要求,附加制动器应能使具有制动载荷向下运行的自动扶梯和自动人行道有效地减速停止,并使其保持静止状态,减速度不应超过1m/s2。
[0006]
现有附加制动器基本上都是棘轮棘爪结构,附加制动器动作时棘爪在制动驱动器的作用下,卡住棘轮上的齿槽或挡块,使安装在驱动主轴上的棘轮不能随驱动主轴同步转动而被制动,由于自动扶梯或自动人行道的惯性以及乘客载荷的作用,梯级(踏板)链轮或驱动轮、制动压板与棘轮发生相对运动,在制动摩擦力矩的作用下,自动扶梯或自动人行道减速直至停止运行。这种结构的附加制动器适用能力差,对于不同提升高度和制动载荷的自动扶梯或自动人行道,梯级(踏板)链轮或驱动轮、制动压板与棘轮之间的制动摩擦力矩需根据需要预先设定,设定值需要大于自动扶梯或自动人行道满载工况下的制动载荷等效力矩,这样才能保证自动扶梯或自动人行道的有效制停,制动摩擦力矩调试完成后就无法再变动;由于附加制动器动作时还需要满足减速度不应超过1m/s2的标准要求,因此制动摩擦力矩在设定时要求精度很高,需控制在较小的范围内,这样才能保证附加制动器动作时既能有效制停,制动减速度又符合标准要求,对安装调整人员的技术水平要求很高。
[0007]
当附加制动器动作、紧急制停自动扶梯或自动人行道时,棘爪卡住棘轮瞬时,由于
制动摩擦力矩是根据自动扶梯或自动人行道的规格预先设定的较大静摩擦力矩,附加制动器制动时棘轮相对驱动主轴发生相对转动,静摩擦力矩转变为动摩擦力矩,制动摩擦力矩在静与动摩擦力矩的转化过程中会产生巨大冲击,使自动扶梯或自动人行道的制动减速度瞬时值发生剧烈变化,造成自动扶梯的梯级或自动人行道的踏板产生晃动,梯级(踏板)上的乘客容易发生由于站立不稳而摔倒的伤害事故。
技术实现要素:
[0008]
本发明要解决的技术问题是,附加制动器安全性更高,结构紧凑,扩展方便,适用能力强,可以方便地对制动力进行调整,现场可维护性好。
[0009]
为解决上述技术问题,本发明提供的附加制动器,其包括驱动机构、运动杆、弹性元件、主转轴、主连杆、制动盘及摩擦片;
[0010]
所述驱动机构、主转轴、弹性元件后端及制动盘轴线相对位置固定;
[0011]
所述主连杆绕所述主转轴枢转固定;
[0012]
所述运动杆固定在弹性元件前端;
[0013]
所述运动杆前端并铰接于主连杆头端;
[0014]
所述主连杆尾端连接有摩擦片;
[0015]
所述驱动机构用于驱动所述运动杆前后移动;
[0016]
所述驱动机构不对所述运动杆控制时,所述弹性元件为释放状态,弹性元件使运动杆向前移动,带动主连杆尾端的摩擦片贴向制动盘并对制动盘施加压力;
[0017]
所述驱动机构对所述运动杆控制时,能使所述运动杆向后移动,并使弹性元件向后压缩形变,带动主连杆尾端连接的摩擦片远离制动盘,减小摩擦片施加到制动盘的压力。
[0018]
较佳的,所述驱动机构为液压装置、气动装置或电磁铁装置。
[0019]
较佳的,所述驱动机构为电磁铁装置;
[0020]
所述电磁铁装置不加电时,不对所述运动杆控制,所述弹性元件为释放状态;
[0021]
所述电磁铁装置加电时,能产生使所述运动杆向后移动的电磁力。
[0022]
较佳的,所述主连杆尾端通过第一转轴枢转连接第二连杆的中部;
[0023]
第二连杆的尾端通过第二转轴枢转连接第一摩擦片;
[0024]
第二连杆的头端通过第三转轴枢转连接第三连杆前端;
[0025]
第四转轴与所述主转轴相对位置固定;
[0026]
第四连杆中部枢转固定到所述第四转轴;
[0027]
第四连杆头端通过第五转轴枢转连接第三连杆后端;
[0028]
第四连杆尾端通过第六转轴枢转连接第二摩擦片。
[0029]
较佳的,主转轴、第一转轴、第二转轴、第三转轴、第四转轴的轴线均为前后方向;
[0030]
主转轴沿左右方向到第一转轴的距离,小于主转轴沿左右方向到运动杆前端同主连杆头端铰接点的距离的1/2。
[0031]
较佳的,主转轴沿左右方向到第一转轴的距离,介于主转轴沿左右方向到运动杆前端同主连杆头端铰接点的距离的1/6~1/3。
[0032]
较佳的,所述摩擦片为烧结合金或烧结陶瓷。
[0033]
本发明公开的一种包括所述的附加制动器的自动扶梯或自动人行道,所述制动盘
固定连接自动扶梯或自动人行道驱动主轴,随驱动主轴同轴旋转;
[0034]
驱动机构、主转轴、第四转轴固定在自动扶梯或自动人行道的桁架上。
[0035]
较佳的,自动扶梯或自动人行道设置有多个附加制动器。
[0036]
较佳的,制动盘布置在自动扶梯驱动主轴两端梯级链轮的外侧,或者布置在自动人行道驱动主轴两端踏板链轮的外侧。
[0037]
较佳的,制动盘布置在自动扶梯驱动主轴两端梯级链轮之间,或者布置在自动人行道驱动主轴两端踏板链轮之间。
[0038]
本发明的附加制动器,驱动机构不对运动杆控制时,弹性元件为释放状态,弹性元件可以通过摩擦片提供制动力;所述驱动机构对所述运动杆控制时,能使控制运动杆向后移动,在制停过程中能控制制动摩擦力矩从零开始逐步增大,可保证在有效制停的前提下减少冲击,安全性更高,结构紧凑,扩展方便,适用能力强。实施例一附加制动器,由弹性元件提供制动力,通过调整弹性元件弹力,可以方便地对制动力进行调整,现场可维护性好。
附图说明
[0039]
为了更清楚地说明本发明的技术方案,下面对本发明所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0040]
图1为本发明的自动扶梯或自动人行道一实施例的结构示意图;
[0041]
图2为本发明的自动扶梯或自动人行道另一实施例的结构示意图;
[0042]
图3为本发明的附加制动器一实施例的非制动状态示意图;
[0043]
图4为本发明的附加制动器一实施例的制动状态示意图。
[0044]
附图标记说明
[0045]
1驱动机构;2运动杆;30主转轴;31第一转轴;32第二转轴;33第三转轴;34第四转轴;35第五转轴;36第六转轴;40主连杆;42第二连杆;43第三连杆;44第四连杆;5制动盘;71第一摩擦片;72第二摩擦片;6驱动主轴;61链轮。
具体实施方式
[0046]
下面将结合附图,对本发明中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0047]
实施例一
[0048]
如图3、图4所示,附加制动器包括驱动机构1、运动杆2、弹性元件、主转轴30、主连杆40、制动盘5、摩擦片71,72、;
[0049]
所述驱动机构1、主转轴30、弹性元件后端及制动盘5轴线相对位置固定;
[0050]
所述主连杆40绕所述主转轴30枢转固定;
[0051]
所述运动杆2固定在弹性元件前端;
[0052]
所述运动杆2前端并铰接于主连杆40头端;
[0053]
所述主连杆40尾端连接有摩擦片71,72;
[0054]
所述驱动机构1用于驱动所述运动杆2前后移动;
[0055]
所述驱动机构1不对所述运动杆2控制时,所述弹性元件为释放状态,弹性元件使运动杆2向前移动,带动主连杆40尾端的摩擦片71,72贴向制动盘5并对制动盘5施加压力;
[0056]
所述驱动机构1对所述运动杆2控制时,能使所述运动杆2向后移动,并使弹性元件向后压缩形变,带动主连杆40尾端连接的摩擦片71,72远离制动盘,减小摩擦片71,72施加到制动盘5的压力。
[0057]
较佳的,所述驱动机构可以为液压装置、气动装置或电磁铁装置等。
[0058]
实施例一的附加制动器,驱动机构1不对运动杆控制时,弹性元件为释放状态,弹性元件可以通过摩擦片71,72提供制动力;所述驱动机构1对所述运动杆控制时,能使控制运动杆向后移动,在制停过程中能控制制动摩擦力矩从零开始逐步增大,可保证在有效制停的前提下减少冲击,安全性更高,结构紧凑,扩展方便,适用能力强。实施例一附加制动器,由弹性元件提供制动力,通过调整弹性元件弹力,可以方便地对制动力进行调整,现场可维护性好。
[0059]
实施例二
[0060]
基于实施例一的附加制动器,所述驱动机构1为电磁铁装置;
[0061]
所述电磁铁装置不加电时,不对所述运动杆2控制,所述弹性元件为释放状态;
[0062]
所述电磁铁装置加电时,能产生使所述运动杆2向后移动的电磁力。
[0063]
实施例二的附加制动器,弹性元件为释放状态时可以通过摩擦片71,72提供制动力,并可以通过控制电磁铁装置的电流控制制动力的大小。
[0064]
实施例三
[0065]
基于实施例一的附加制动器,所述主连杆40尾端通过第一转轴31枢转连接第二连杆42的中部;
[0066]
第二连杆42的尾端通过第二转轴32枢转连接第一摩擦片71;
[0067]
第二连杆42的头端通过第三转轴33枢转连接第三连杆43前端;
[0068]
第四转轴34与所述主转轴30相对位置固定;
[0069]
第四连杆44中部枢转固定到所述第四转轴34;
[0070]
第四连杆44头端通过第五转轴35枢转连接第三连杆43后端;
[0071]
第四连杆44尾端通过第六转轴36枢转连接第二摩擦片72。
[0072]
较佳的,摩擦片71,72为烧结合金或烧结陶瓷。较佳的,摩擦片71,72为烧结合金,使对偶件之间的摩擦系数较为稳定,并可获得优良的耐磨性,同时成本较低、经济性较高。
[0073]
实施例三的附加制动器,驱动机构1驱动运动杆2后移时,主连杆40头端随着运动杆2后移,主连杆40绕主转轴30旋转,主连杆40尾端前移,第二连杆42随着第一转轴31同步前移,此时第三连杆43被带动同步前移,第四连杆44头端前移并绕所述第四转轴34转动,第四连杆44尾端后移;在第一摩擦片71随第二连杆42前移的同时,第二摩擦片72随第四连杆44尾端后移,第一摩擦片71、第二摩擦片72远离,施加到制动盘5上的压力(夹紧力)减小(或者变为0)。
[0074]
所述驱动机构1不对所述运动杆2控制时,所述弹性元件为释放状态,弹性元件使运动杆2向前运动,运动杆2向前顶出,主连杆40绕主转轴30旋转,主连杆40尾端后移,第二连杆42随着第一转轴31同步后移,此时第三连杆43被带动同步后移,第四连杆44头端后移
并绕所述第四转轴34转动,第四连杆44尾端前移;在第一摩擦片71随第二连杆42后移的同时,第二摩擦片72随第四连杆44尾端前移,第一摩擦片71、第二摩擦片72靠近,施加到制动盘5上的压力(夹紧力)增大。
[0075]
实施例三的附加制动器,采用多连杆结构传动来减小体积,结构紧凑,扩展能力强。
[0076]
实施例四
[0077]
基于实施例三的附加制动器,主转轴30、第一转轴31、第二转轴32、第三转轴33、第四转轴34的轴线均为前后方向;
[0078]
主转轴30沿左右方向到第一转轴31的距离,小于主转轴30沿左右方向到运动杆2前端同主连杆40头端铰接点的距离的1/2(例如,为1/6~1/3)。
[0079]
实施例四的附加制动器,将运动杆2输出的制动力按固定比例增大,传递到摩擦片71,72;同时将运动杆2输出的位移按固定比例减小,传递到摩擦片71,72;制动力的增大比例与位移的减小比例相同,且所述制动盘5两侧的摩擦片71,72传递的制动力、位移量接近相同;制动时,制动力和位移传递至摩擦片71,72,摩擦片71,72同时压紧制动盘5产生制动摩擦力矩,制动摩擦力矩逐渐增加,自动扶梯或自动人行道在制动摩擦力矩和惯性共同作用下减速直至制停;如驱动机构1对运动杆2控制施加与弹性元件弹力作用方向相反的驱动力,弹力被部分或全部抵消,当驱动力大于弹力时,运动杆向后移动,运动杆向后位移传递至摩擦片71,72,摩擦片71,72脱开制动盘5不再与制动盘产生摩擦力,自动扶梯或自动人行道可正常运行。实施例四的附加制动器,使得制动力以及位移达到一个较优化的平衡,可减小附加制动器的体积,同时又可使自动扶梯或自动人行道正常运行时,摩擦片能完全脱开制动盘不会与制动盘接触、碰擦。
[0080]
实施例五
[0081]
一种包括实施例一、二或三的附加制动器的自动扶梯或自动人行道;
[0082]
所述制动盘5固定连接自动扶梯或自动人行道驱动主轴6,随驱动主轴6同轴旋转;
[0083]
驱动机构1、主转轴30、第四转轴34固定在自动扶梯或自动人行道的桁架上。
[0084]
较佳的,自动扶梯或自动人行道设置有多个附加制动器。在自动扶梯或自动人行道所需要的制动摩擦力矩较大时,总的制动摩擦力矩由所述多个附加制动器分担,使得整体结构更紧凑。
[0085]
实施例五的自动扶梯或自动人行道,弹性元件为释放状态时,附加制动器对自动扶梯或自动人行道进行制动控制。附加制动器分为不控制或控制两种状态。如果是不控制状态,驱动机构1不对运动杆2控制,弹性元件为释放状态,由弹性元件提供制动力经过摩擦片71,72传递全部作用在制动盘5上;如是控制状态,所述驱动机构1可以驱动所述运动杆2抵消全部或部分弹性元件弹力前后移动。当自动扶梯或自动人行道正常运行时,驱动机构1驱动运动杆2后移,第一摩擦片71、第二摩擦片72施加到制动盘5上的压力(夹紧力)减小(或者变为0);当自动扶梯或自动人行道紧急制停时,驱动机构1可以减小施加到所述运动杆2的向后的力,弹性元件的弹力可以驱动运动杆2向前移动,带动第一摩擦片71、第二摩擦片72靠近,施加到制动盘5上的压力(夹紧力)增大,附加制动器制动自动扶梯或自动人行道。
[0086]
实施例五的自动扶梯或自动人行道,驱动机构1可以驱动运动杆2逐步移动,使制动摩擦力矩是从零开始逐步增大,可保证在有效制停的前提下减少冲击,使自动扶梯或自
动人行道的制动过程更平稳,避免因紧急制动时梯级剧烈晃动可能产生的乘客摔倒的风险,安全性更高。
[0087]
实施例六
[0088]
基于实施例五的自动扶梯或自动人行道,如图1所示,制动盘5布置在自动扶梯驱动主轴6两端梯级链轮61的外侧,或者布置在自动人行道驱动主轴两端踏板链轮61的外侧。
[0089]
实施例六的附加制动器,梯级或踏板不会遮挡制动盘5,制动盘容易接近,便于日常检查维护。
[0090]
实施例七
[0091]
基于实施例五的自动扶梯或自动人行道,如图2所示,制动盘5布置在自动扶梯驱动主轴两端梯级链轮之间,或者布置在自动人行道驱动主轴两端踏板链轮之间。
[0092]
实施例七的附加制动器,制动盘5在自动扶梯或自动人行道的载客梯级/踏板与返回梯级/踏板之间,不需要额外占用机房空间,内部空间利用率更高,日常检查、维护时需要拆除部分梯级或踏板。
[0093]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips