
 商标分类
商标分类  商标转让
商标转让 
一种多功能抢险设备节能系统及其控制方法与流程
 2021-02-20 01:02:10|
2021-02-20 01:02:10| 281|
281| 起点商标网
起点商标网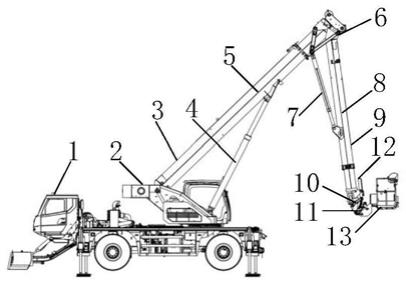
[0001]
本发明涉及一种多功能抢险设备节能系统及其控制方法,属于抢险救援机械设备技术领域。
背景技术:
[0002]
多功能抢险设备包含起重(含回转)、抓取、登高平台、破拆等多个子液压系统,各子系统工作时需频繁切换工作模式。尤其是实际作业时,无负荷待机时间较长,液压系统工作在不同的工况下,系统的能耗,即燃油经济性也是不同的。抢险设备的工作均是在补给相对困难的场地进行的,能耗低意味着设备续航能力强,对救人救灾的意义不言而喻。同时能耗低对运营成本及减少排放也意义重大。
[0003]
目前,对设备能耗进行研究的设备均是工况相对单一的移动设备,比如起重机,节能主要聚焦在臂架或卷扬下落过程中势能回收,一般通过蓄能器将势能存储,或通过连接发电机将势能转化为电能通过蓄电池进行存储。现有上车能同时实现起重、抓取、登高平台、破拆等多种功能的设备很少,对其工作模式、各子液压系统的控制方式均在探索阶段,对设备的能耗研究也较少。现有工程设备在机具工作时,液压泵一直处于恒压模式下,该模式下系统压力处于切断压力值,系统压力较高。
技术实现要素:
[0004]
目的:为了克服现有技术中存在的设备工况单一,基本不存在多机具、多模式作业过程,不存在模式识别以及动作识别,无法通过控制程序使系统工作在能耗最低的状态,也就无法实现降低能耗的功能。泵处于恒压模式下,系统压力长时间处于较高的切断压力下,不仅能耗高,对液压元件的寿命影响也较大,本发明提供一种多功能抢险设备节能系统及其控制方法。
[0005]
技术方案:为解决上述技术问题,本发明采用的技术方案为:一种多功能抢险设备节能系统,包括:第一臂、第二臂,第一臂长角传感器安装在第一臂上,用于检测第一臂的长度和倾斜角度;第二臂长角传感器安装在第二臂上,用于检测第二臂的长度和倾斜角度;倾角传感器安装在机具上,用于检测机具倾斜角度;电控手柄给出pwm控制信号,经控制器处理后,输出电压信号,使压力切换阀得电或失电,用于使液压泵工作在不同模式下;电比例多路阀接收电流信号,控制电比例多路阀阀芯的流量,流量输入到液压执行机构,液压执行机构分别控制第一臂、第二臂的长度和倾斜角度;显示器用于显示整车工作模式和状态。
[0006]
作为优选方案,所述整车工作模式和状态,包括第一臂、第二臂的实时臂长和倾斜角度。
[0007]
作为优选方案,所述液压泵为变量泵,通过压力切换阀可实现恒压差变量泵和恒压变量泵两种模式切换。
[0008]
作为优选方案,所述液压执行机构包括第一臂变幅缸、第一臂伸缩缸、第二臂变幅
缸、第二臂伸缩缸,第一臂通过第一臂变幅缸、第一臂伸缩缸实现第一臂的伸缩和变幅,第二臂通过第二臂变幅缸、第二臂伸缩缸实现第二臂的伸缩和变幅。
[0009]
作为优选方案,所述机具采用平台或抓石器。
[0010]
作为优选方案,所述电控手柄、显示器、控制器、电比例多路阀安装在转台上。
[0011]
作为优选方案,所述压力切换阀、液压泵安装在底盘上。
[0012]
一种多功能抢险设备节能系统的控制方法,包括如下步骤:若整车开机上电时,控制器识别倾角传感器信号,若倾角传感器无信号输入,则判断整车为起重工况,并在显示器上提示操作者予以确认;控制器对压力切换阀无信号输出,液压泵工作在恒压差模式下;电控手柄动作时,控制器识别信号类型为第一臂变幅、第一臂伸缩、第二臂变幅、第二臂伸缩后,并将电流信号发送到电比例多路阀,电比例多路阀在电控手柄控制下打开,压力油进入液压执行机构,第一臂或第二臂实现变幅或伸缩动作;在电控手柄动作过程中,控制器同时检测第一臂长角传感器、第二臂长角传感器的信号,根据第一臂长角传感器、第二臂长角传感器检测到的长度信号、角度信号,判断第一臂,第二臂是伸缩还是变幅,并与电控手柄动作信号的识别结果进行比对,如出现不符,在显示器上提示错误并终止动作,直至故障排除;如对比相符则一切动作正常;若整车开机上电时,控制器识别倾角传感器有信号输入,则判断整车为机具工况,机具工况包括平台或抓取,并在显示器上提示操作者予以确认;当电控手柄发出第一臂或第二臂伸缩动作信号时,控制器识别手柄信号为第一臂或第二臂伸缩信号,此时,控制器对压力切换阀无信号输出,液压泵工作在恒压差模式下,电比例多路阀在电控手柄控制下打开,压力油进入液压执行机构,第一臂或第二臂臂实现伸缩动作;当电控手柄发出第一臂或第二臂变幅动作信号时,控制器识别手柄信号为第一臂或第二臂变幅信号,此时,控制器对压力切换阀有信号输出,液压泵工作在恒压模式下,泵工作压力为其切断压力,电比例多路阀在电控手柄控制下打开,压力油进入液压执行机构,第一臂或第二臂实现变幅动作;在电控手柄动作过程中,控制器同时检测第一臂长角传感器、第二臂长角传感器以及倾角传感器的信号,根据传感器检测到的信号类型判断第一臂和第二臂动作类型,并与电控手柄动作信号的识别结果进行比对,如出现不符,在显示器上提示错误并终止动作,直至故障排除。
[0013]
作为优选方案,液压泵工作在恒压差模式下,液压泵压力在2-3mpa;液压泵工作在恒压模式下,液压泵压力在20-30 mpa。
[0014]
作为优选方案,传感器检测到的信号类型包括:长度信号、角度信号,第一臂和第二臂动作类型包括伸缩或变幅。
[0015]
有益效果:本发明提供的一种多功能抢险设备节能系统及其控制方法,主要通过对多功能设备的工况、动作进行自动识别,通过智能控制系统,使液压系统,主要是液压泵处于能耗较低的工作状态,降低系统待命阶段以及工作阶段的能耗,降低设备的运营成本,减少设备排放,提高液压泵及液压元件的工作寿命。其优点如下:1.实现了多功能抢险设备不同工况及不同动作的自动识别。
[0016]
2.通过智能控制系统,使液压系统处于能耗较低的工作状态,降低了系统能耗,进
而降低了设备运营成本和排放。
[0017]
3.提高了液压泵和液压元件的工作寿命,降低设备的维护成本。
附图说明
[0018]
图1为多功能抢险设备机械结构示意图。
[0019]
图2为本发明的多功能抢险设备节能系统原理图。
具体实施方式
[0020]
下面结合具体实施例对本发明作更进一步的说明。
[0021]
如图1所示,一种多功能抢险设备工作臂采用的混合式结构形式,包括底盘1上安装的转台2,第一臂3与转台2通过销轴连接,并通过第一臂变幅油缸4实现变幅动作。第一臂3为一级伸缩臂,通过第一臂伸缩油缸5实现伸缩动作。第二臂8与第一臂3通过第一连杆机构6和第二臂变幅油缸7连接,由第一连杆机构6和第二臂变幅缸7实现第二臂8展开与折叠,第一臂和第二臂平行布置且夹角范围0-180
°
。第二臂8为一级伸缩臂,通过第二臂伸缩油缸9实现伸缩动作。机具13和第二臂8采用快速连接器11连接,通过第二连杆机构10和机具油缸12实现机具13的姿态调整。机具13可以采用平台,也可以采用配套的抓石器。
[0022]
第一臂3上安装有第一臂长角传感器,第二臂8上安装有第二臂长角传感器,机具13上安装有倾角传感器。转台2上安装有电控手柄、显示器、控制器、电比例多路阀。底盘1上安装有压力切换阀、液压泵。第一臂变幅缸4、第一臂伸缩缸5、第二臂变幅缸7、第二臂伸缩缸9为液压执行机构。
[0023]
如图2所示,一种多功能抢险设备节能系统,包括:第一臂长角传感器、倾角传感器、第二臂长角传感器、电控手柄、控制器、显示器、液压泵、压力切换阀、电比例多路阀、液压执行机构、第一臂、第二臂。
[0024]
第一臂长角传感器安装在第一臂上,检测第一臂的长度和倾斜角度。第二臂长角传感器安装在第二臂上,检测第二臂的长度和倾斜角度。倾角传感器安装在机具上,检测机具倾斜角度。电控手柄给出pwm控制信号,经控制器处理后,输出电压信号,使压力切换阀得电或失电,从而使液压泵工作在不同模式下。电比例多路阀接收电流信号,控制电比例多路阀阀芯的流量,流量输入到液压执行机构,液压执行机构分别控制第一臂、第二臂的长度和倾斜角度。显示器用于显示整车工作模式和状态,包括第一臂、第二臂的实时臂长和倾斜角度。第一臂和第二臂动作分为伸缩和变幅,伸缩和变幅动作分别引起工作臂长度和角度变化。液压泵为变量泵,通过压力切换阀可实现恒压差变量泵和恒压变量泵两种模式切换。
[0025]
一种多功能抢险设备节能系统的控制方法,包括如下步骤:若整车开机上电时,控制器首先识别倾角传感器信号,若倾角传感器无信号输入,则判断整车为起重工况,并在显示器上提示操作者予以确认。
[0026]
控制器对压力切换阀无信号输出,液压泵工作在恒压差模式下,此时液压泵在电控手柄无动作时的待机状态下处于低压、小流量运行状态,压力一般在2-3mpa,因此此时液压系统功率损失约为1.5kw。
[0027]
电控手柄动作时,控制器识别信号类型为第一臂变幅、第一臂伸缩、第二臂变幅、第二臂伸缩后,并将电流信号发送到电比例多路阀,电比例多路阀在电控手柄控制下打开,
压力油进入液压执行机构,第一臂或第二臂实现变幅或伸缩动作。
[0028]
在电控手柄动作过程中,控制器同时检测第一臂长角传感器、第二臂长角传感器的信号,根据第一臂长角传感器、第二臂长角传感器检测到的长度信号、角度信号,判断第一臂,第二臂是伸缩还是变幅,并与电控手柄动作信号的识别结果进行比对,如出现不符,在显示器上提示错误并终止动作,直至故障排除;对比相符则一切动作正常。
[0029]
若整车开机上电时,控制器识别倾角传感器有信号输入,则判断整车为机具工况,工况包括平台或抓取,并在显示器上提示操作者予以确认。
[0030]
当电控手柄发出第一臂或第二臂伸缩动作信号时,控制器识别手柄信号为第一臂或第二臂伸缩信号,此时,控制器对压力切换阀无信号输出,液压泵工作在恒压差模式下,电比例多路阀在电控手柄控制下打开,压力油进入液压执行机构,第一臂或第二臂臂实现伸缩动作。
[0031]
当电控手柄发出第一臂或第二臂变幅动作信号时,控制器识别手柄信号为第一臂或第二臂变幅信号,此时,控制器对压力切换阀有信号输出,液压泵工作在恒压模式下,泵工作压力为其切断压力,一般根据需要设置在20-30 mpa。电比例多路阀在电控手柄控制下打开,压力油进入液压执行机构,第一臂或第二臂实现变幅动作。在电控手柄动作过程中,控制器同时检测第一臂长角传感器、第二臂长角传感器以及倾角传感器的信号,根据传感器检测到的信号类型(长度信号、角度信号)判断第一臂和第二臂动作类型(伸缩或变幅),并与电控手柄动作信号的识别结果进行比对,如出现不符,在显示器上提示错误并终止动作,直至故障排除。
[0032]
根据液压泵厂家提供的技术参数,该泵工作在切断压力、小流量状态下,系统的压力损失约为6kw,双泵的功率损失在12kw以上,该工况避免了泵长时间工作在切断压力下,待机工况下节约功率9kw。同时,减少了泵工作在高压工况下的时间,提高了泵和液压元件的寿命。
[0033]
控制器根据长角传感器、倾角传感器、电控手柄的信号,判断第一臂、第二工作臂的动作,识别整车的作业工况,通过电气控制信号使压力切换阀得电或失电,使液压泵工作在不同模式下。液压泵为变量泵,通过压力切换阀可实现恒压差变量泵和恒压变量泵两种模式切换。电比例多路阀接收电控手柄发给控制器处理后的电流信号,该电流信号与多路阀阀芯的流量成正比,该流量决定了液压执行机构的运行速度,即第一臂和第二臂的运动速度。显示器用于显示整车工作模式和状态,尤其是第一臂、第二臂的实时臂长和倾斜角度。
[0034]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips