
 商标分类
商标分类  商标转让
商标转让 
一种机器人智能乘梯控制模块的制作方法
 2021-02-19 23:02:48|
2021-02-19 23:02:48| 347|
347| 起点商标网
起点商标网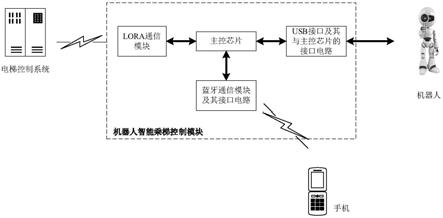
[0001]
本实用新型属于自动控制技术领域,更具体地说,尤其涉及一种机器人智能乘梯控制模块。
背景技术:
[0002]
随着智能技术的发展,许多机器人已广泛应用于酒店、快递、展会等行业,用于完成引导、投送等服务。但是,在完成任务的过程中,可能需要乘梯上下,需要对电梯的运行和开关门等进行控制。
[0003]
目前,市场上的机器人种类繁多,不同厂家开发的机器人并没有统一的标准和规范,因此在实现机器人乘梯控制时,仍需单独设计和开发电梯控制模块。因此,有必要开发一种单独的标准化模块电路,将其安装在机器人或智能移动设备上,实现对电梯的控制。
技术实现要素:
[0004]
本实用新型的目的是为了解决现有技术中存在的缺点,将电梯控制功能做成标准化模块,可以支持任意型号的机器人,只需插上该机器人智能乘梯控制模块,安装相应驱动并调用sdk的提供的api函数即可实现智能乘梯,既实现了电梯控制功能的标准化,又大大的降低了系统的开发成本,采用该机器人智能乘梯控制模块后,可通过手机app实现对电梯控制系统的配置和控制,无需再单独设计手持终端,只需在手机上安装app并连接到该机器人智能乘梯控制模块,即可实现对电梯系统的配置和控制,而提出的一种机器人智能乘梯控制模块。
[0005]
为实现上述目的,本实用新型提供如下技术方案:
[0006]
一种机器人智能乘梯控制模块,包括:主控芯片、usb接口及其与主控芯片的接口电路、蓝牙通信模块及其接口电路和lora通信模块;
[0007]
所述主控芯片用于所述蓝牙通信模块和所述lora通信模块的控制配置、来往指令的转换和数据的传递;
[0008]
所述usb接口及其与主控芯片的接口电路用于所述主控芯片与机器人的通信连接;
[0009]
所述蓝牙通信模块及其接口电路用于所述主控芯片与手机之间的通信连接;
[0010]
所述lora通信模块用于所述主控芯片与电梯控制系统的通信连接,所述主控芯片通过所述lora通信模块将指令发送到电梯控制系统,同时接收电梯控制系统的回复指令或状态信息,实现对电梯系统的控制和状态获取。
[0011]
优选的,所述主控芯片采用stm32单片机,且所述主控芯片具有3个uart 接口,用于分别与usb接口与主控芯片的接口电路、蓝牙通信模块的接口电路和lora通信模块相连接。
[0012]
优选的,所述usb接口包括usbtypea、typeb、micro-b、micro-ab、mini-a、 mini-b、typec接口形式,所述usb接口与主控芯片的接口电路采用cp2102 芯片。
[0013]
优选的,所述机器人具有所述usb接口形式中的任意一种或多种。
[0014]
优选的,所述机器人的操作系统中具有可安装所机器人智能乘梯控制模块的驱动程序,并具有sdk用于开发。
[0015]
优选的,所述机器人为餐厅、酒店、物流服务机器人。
[0016]
优选的,所述手机通过app程序对所述电梯控制系统进行控制和获取所述电梯控制系统的状态信息。
[0017]
本实用新型的技术效果和优点:
[0018]
(1)将电梯控制功能做成标准化模块,可以支持任意型号的机器人,机器人开发厂商无需再开发专用控制电路,只需插上该机器人智能乘梯控制模块,安装相应驱动并调用sdk的提供的api函数即可实现智能乘梯,既实现了电梯控制功能的标准化,又大大的降低了系统的开发成本。
[0019]
(2)采用该机器人智能乘梯控制模块后,可通过手机app实现对电梯控制系统的配置和控制,无需再单独设计手持终端,只需在手机上安装app并连接到该机器人智能乘梯控制模块,即可实现对电梯系统的配置和控制。
附图说明
[0020]
图1为本实用新型的一种机器人智能乘梯控制模块的组成框图;
[0021]
图2为本实用新型的机器人智能乘梯控制的流程示意图;
[0022]
图3为本实用新型的电梯系统控制和配置的流程图。
具体实施方式
[0023]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图和具体实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0024]
本实用新型提供了如图1-3所示的一种技术方案:
[0025]
本实用新型提供一种机器人智能乘梯控制模块,包括:主控芯片、usb接口及其与主控芯片的接口电路、蓝牙通信模块及其接口电路和lora通信模块;
[0026]
主控芯片用于蓝牙通信模块和lora通信模块的控制配置、来往指令的转换和数据的传递;
[0027]
usb接口及其与主控芯片的接口电路用于主控芯片与机器人的通信连接;
[0028]
蓝牙通信模块及其接口电路用于主控芯片与手机之间的通信连接;
[0029]
lora通信模块用于主控芯片与电梯控制系统的通信连接,主控芯片通过 lora通信模块将指令发送到电梯控制系统,同时接收电梯控制系统的回复指令或状态信息,实现对电梯系统的控制和状态获取。
[0030]
进一步的,主控芯片采用stm32单片机,且主控芯片具有3个uart接口,用于分别与usb接口与主控芯片的接口电路、蓝牙通信模块的接口电路和lora 通信模块相连接。
[0031]
进一步的,usb接口包括usbtypea、typeb、micro-b、micro-ab、mini-a、 mini-b、
typec接口形式,usb接口与主控芯片的接口电路采用cp2102芯片。
[0032]
进一步的,机器人具有usb接口形式中的任意一种或多种。
[0033]
进一步的,机器人的操作系统中具有可安装所机器人智能乘梯控制模块的驱动程序,并具有sdk用于开发。
[0034]
进一步的,机器人为餐厅、酒店、物流服务机器人。
[0035]
进一步的,手机通过app程序对电梯控制系统进行控制和获取电梯控制系统的状态信息。
[0036]
本实用新型还提供了一种机器人智能乘梯方法,包括如下步骤:
[0037]
s1.将该机器人智能乘梯控制模块通过usb接口安装在机器人上,机器人开机,通过调用sdk提供的api函数对通信模块进行配置;
[0038]
s2.机器人到达电梯门前附近,查询当前楼层并发出请求使用电梯指令;
[0039]
s3.电梯控制系统根据自己当前的状态为繁忙还是空闲回复机器人乘梯请求,如为空闲,则控制电梯前往机器人所在楼层,如为繁忙,则在任务结束后前往机器人所在楼层;
[0040]
s4.电梯到达机器人所在楼层,打开电梯门,并发出门已打开指令,机器人接到指令后向电梯内移动;
[0041]
s5.机器人进入电梯后,向电梯控制系统发出已进入电梯指令,电梯控制系统控制电梯门关闭,并前往机器人指定的目标楼层;
[0042]
s6.电梯到达机器人指定的目标楼层,打开电梯门,并发出门已打开指令,机器人接到指令后向电梯外移动;
[0043]
s7.机器人移出电梯后,向电梯控制系统发出已移出电梯指令,电梯控制系统控制电梯门关闭,任务结束。
[0044]
综上所述:本实用新型将电梯控制功能做成标准化模块,可以支持任意型号的机器人,机器人开发厂商无需再开发专用控制电路,只需插上该机器人智能乘梯控制模块,安装相应驱动并调用sdk的提供的api函数即可实现智能乘梯,既实现了电梯控制功能的标准化,又大大的降低了系统的开发成本。
[0045]
采用该机器人智能乘梯控制模块后,可通过手机app实现对电梯控制系统的配置和控制,无需再单独设计手持终端,只需在手机上安装app并连接到该机器人智能乘梯控制模块,即可实现对电梯系统的配置和控制。
[0046]
最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips