
 商标分类
商标分类  商标转让
商标转让 
一种自动勾臂式垃圾车的制作方法
 2021-02-19 22:02:17|
2021-02-19 22:02:17| 436|
436| 起点商标网
起点商标网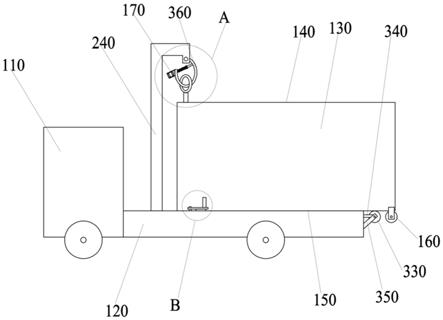
[0001]
本发明属于垃圾车技术领域,具体涉及到一种自动勾臂式垃圾车。
背景技术:
[0002]
垃圾车主要用作运输各种垃圾,适用于运输小区生活垃圾,并可将装入的垃圾运输至大型垃圾处理厂,大大地提高了垃圾收集和运输的效率,新型垃圾车具有质量可靠,故障率低,维护方便,运行费用低等特点;目前,垃圾车可分为:压缩式垃圾车、自卸式垃圾车、摆臂式垃圾车、自装卸式垃圾车、密封式垃圾车和勾臂式垃圾车。
[0003]
其中,勾臂垃圾车又称为车厢可卸式垃圾车。主要适用于市政环卫、物业管理、大型厂、工矿等各种场所收集、运载各种垃圾。勾臂垃圾车采用全液压控制操作系统,垃圾厢与底盘可彻底分离,具有结构合理,操作简便、稳定、使用效率高、密封性能好、倾倒方便等优点,能实现一台车与多个垃圾厢联合作业,循环运输,充分提高车辆的运输能力。
[0004]
现有的勾臂垃圾车都包括车架、勾臂和垃圾箱;勾臂挂在垃圾箱上后就开始抬升垃圾箱,以使得垃圾箱被抬升至车架上。但勾臂存在从垃圾箱上滑脱的可能性,安全隐患较大。
技术实现要素:
[0005]
本发明的主要目的是提供一种自动勾臂式垃圾车,旨在解决现有的勾臂式垃圾车在工作时,勾臂存在从垃圾箱上滑脱的可能性,安全隐患较大的问题。
[0006]
本发明的内容包括:
[0007]
一种自动勾臂式垃圾车,包括车体、垃圾箱和勾臂组件;所述车体包括车头和车架;所述车架连接于所述车头;所述车头用于驱动所述车架移动;所述勾臂组件设置于所述车架;
[0008]
所述勾臂组件包括第一液压缸、提拉臂和勾取部件;所述垃圾箱包括顶板和底板;所述底板设置有滚轮;所述顶板的远离所述滚轮的一侧设置有挂环;所述车架的中部开设有沿所述车架的长度延伸的车架槽;
[0009]
所述车架槽包括彼此相对设置的第一竖壁和第二竖壁;所述第一竖壁靠近所述车头;所述第二竖壁远离所述车头;所述提拉臂包括彼此固定连接的第一连接臂、第二连接臂和第三连接臂;所述第一连接臂和所述第二连接臂彼此垂直;所述第一连接臂的一端铰接于所述第二竖壁;所述第一连接臂的另一端固定连接于所述第二连接臂;
[0010]
所述第一液压缸的底座铰接于所述第一竖壁;所述第一液压缸的伸缩杆铰接于所述第一连接臂的中部;所述提拉臂的转动面为竖直面;所述勾取部件连接于所述第三连接臂的远离所述第一连接臂的一端;所述第一液压缸用于驱动所述提拉臂转动,以使所述勾取部件伸出于所述车架;
[0011]
所述勾取部件用于与所述挂环可拆卸连接;所述勾取部件包括勾臂、伸缩杆、弹簧、挡环、连接板、支撑架和电磁铁;
[0012]
所述第二连接臂的远离所述第一连接臂的一端还连接有所述第三连接臂,所述勾臂的一端铰接于所述第三连接臂的远离所述第二连接臂的一端;所述勾臂的另一端开设有通孔;所述支撑架固定设置于所述勾臂的外壁;所述电磁铁设置于所述支撑架;所述伸缩杆活动穿设于所述通孔;所述挡环固定套设于所述伸缩杆;
[0013]
所述连接板固定连接于所述伸缩杆的远离所述挡环的一端;所述连接板和所述挡环分别位于所述通孔的两侧;所述弹簧套设于所述伸缩杆;所述弹簧连接于所述挡环和所述勾臂的内壁;所述连接板为铁质连接板;所述连接板和所述电磁铁正相对;所述弹簧始终呈压缩状态;正常状态下,所述伸缩杆与所述勾臂的内壁接触。
[0014]
优选的,还包括第二液压缸;所述第二液压缸的底座铰接于所述第一竖壁;所述第二液压缸的伸缩杆铰接于所述第一连接臂的中部。
[0015]
优选的,所述第一液压缸和所述第二液压缸彼此平行,且所述第一液压缸和所述第二液压缸分别位于所述第一连接臂的两侧。
[0016]
优选的,所述底板还开设有第一定位槽;所述车架的上表面还设置有与所述第一定位槽配合嵌套的第一定位柱;所述第一定位柱能嵌入所述第一定位槽中,以限制所述垃圾箱于所述车架上的移动。
[0017]
优选的,所述定位柱的顶部设置有缓冲垫层。
[0018]
优选的,所述底板还开设有第二定位槽;所述车架的上表面还设置有与所述第二定位槽配合嵌套的第二定位柱;所述第二定位柱能嵌入所述第二定位槽中,以限制所述垃圾箱于所述车架上的移动。
[0019]
优选的,还包括滑动辊;所述滑动辊转动连接于所述车架的远离所述车头的一侧;所述滑动辊水平设置;所述滑动辊垂直于所述车架的长度方向。
[0020]
优选的,还包括2个第一支撑臂和2个第二支撑臂;所述滑动辊的两端分别转动连接于2个所述第一支撑臂;2个所述第一支撑臂均固定连接于所述车架的远离所述车头的一侧;2个所述第一支撑臂均倾斜设置;
[0021]
其中一个所述第二支撑臂的一端固定连接于其中一个所述第二支撑臂的中部,其中一个所述第二支撑臂的另一端固定连接于所述车架的远离所述车头的一侧;另一个所述第二支撑臂的一端固定连接于另一个所述第二支撑臂的中部,另一个所述第二支撑臂的另一端固定连接于所述车架的远离所述车头的一侧;2个所述第二支撑臂均水平设置。
[0022]
优选的,还包括固定组件;所述固定组件包括转板、转臂和固定板;所述固定板水平固定连接于所述垃圾箱的侧壁;所述固定板的下表面和所述底板的下表面共面;
[0023]
所述转板水平转动连接于所述车架的上表面的靠近所述车头处;所述转臂竖直固定连接于所述转板的上表面;所述转板能转动至贴合盖压所述固定板的上表面。
[0024]
优选的,还包括控制开关;所述控制开关用于控制所述第一液压缸和所述第二液压缸的伸缩。
[0025]
本发明的有益效果是:
[0026]
本发明提出的一种自动勾臂式垃圾车能够保证勾臂和垃圾箱上的挂环始终稳固连接,大大降低了勾臂从垃圾箱上滑脱的可能性,从而大大提升了本垃圾车的安全性。
[0027]
具体的工作原理为:需要通过勾取部件与挂环连接时,电磁铁通电,吸引连接板,从而使得伸缩杆向靠近电磁铁的方向移动,从而使得伸缩杆的一端和勾臂的内壁脱离,从
而开启勾臂,然后手动将勾臂挂在挂环上,然后电磁铁断电,在弹簧的作用下,伸缩杆向远离电磁铁的方向移动,从而使得伸缩杆回到正常状态,此时,伸缩杆的一端重新和勾臂的内壁接触,从而封闭勾臂,能够防止挂环脱离于勾臂。
附图说明:
[0028]
图1为本发明提出的一种自动勾臂式垃圾车一实施例的结构示意图;
[0029]
图2为图1中a处结构放大局部剖视图;
[0030]
图3为图1中b处结构放大局部剖视图;
[0031]
图4为本发明提出的一种自动勾臂式垃圾车一实施例的使用时的结构示意图
[0032]
图5为本发明提出的一种自动勾臂式垃圾车一实施例的俯视图(未示出垃圾箱)。
[0033]
在图中,110-车头,120-车架,130-垃圾箱,140-顶板,150-底板,160-滚轮,170-挂环,190-车架槽,210-第一竖壁,220-第二竖壁,230-第一连接臂,240-第二连接臂,250-第三连接臂,260-第一液压缸,270-第二液压缸,280-第一定位柱,290-第二定位柱,310-转板,320-转臂,330-滑动辊,340-第二支撑臂,350-第一支撑臂,360-勾臂,370-伸缩杆,380-挡环,390-弹簧,420-连接板,430-电磁铁,440-支撑架,450-固定板。
具体实施方式
[0034]
本发明提出一种自动勾臂式垃圾车。
[0035]
请参考附图1-附图5,在本发明提出的一种自动勾臂式垃圾车(以下简称为垃圾车)的一实施例中,本垃圾车包括车体、垃圾箱130和勾臂组件;车体包括车头110和车架120;车架120连接于车头110;车头110用于驱动车架120移动;勾臂组件设置于车架120。
[0036]
勾臂组件包括第一液压缸260、提拉臂和勾取部件;垃圾箱130包括顶板140和底板150;底板150设置有滚轮160;顶板140的远离滚轮160的一侧设置有挂环170;车架120的中部开设有沿车架120的长度延伸的车架槽190。
[0037]
车架槽190包括彼此相对设置的第一竖壁210和第二竖壁220;第一竖壁210靠近车头110;第二竖壁220远离车头110;提拉臂包括彼此固定连接的第一连接臂230、第二连接臂240和第三连接臂250;第一连接臂230和第二连接臂240彼此垂直;第一连接臂230的一端铰接于第二竖壁220;第一连接臂230的另一端固定连接于第二连接臂240。
[0038]
第一液压缸260的底座铰接于第一竖壁210;第一液压缸260的伸缩杆370铰接于第一连接臂230的中部;提拉臂的转动面为竖直面;勾取部件连接于第三连接臂250的远离第一连接臂230的一端;第一液压缸260用于驱动提拉臂转动,以使勾取部件伸出于车架120。
[0039]
勾取部件用于与挂环170可拆卸连接;勾取部件包括勾臂360、伸缩杆370、弹簧390、挡环380、连接板420、支撑架440和电磁铁430。
[0040]
第二连接臂240的远离第一连接臂230的一端还连接有第三连接臂250,勾臂360的一端铰接于第三连接臂250的远离第二连接臂240的一端;勾臂360的另一端开设有通孔(未示出);支撑架440固定设置于勾臂360的外壁;电磁铁430设置于支撑架440;伸缩杆370活动穿设于通孔;挡环380固定套设于伸缩杆370。
[0041]
连接板420固定连接于伸缩杆370的远离挡环380的一端;连接板和挡环380分别位于通孔的两侧;弹簧390套设于伸缩杆370;弹簧390连接于挡环380和勾臂360的内壁;连接
板为铁质连接板;连接板和电磁铁430正相对;弹簧390始终呈压缩状态;正常状态下,伸缩杆370与勾臂360的内壁接触。
[0042]
本发明提出的一种自动勾臂式垃圾车能够保证勾臂360和垃圾箱130上的挂环170始终稳固连接,大大降低了勾臂360从垃圾箱130上滑脱的可能性,从而大大提升了本垃圾车的安全性。
[0043]
具体的工作原理为:需要通过勾取部件与挂环170连接时,电磁铁430通电,吸引连接板420,从而使得伸缩杆370向靠近电磁铁430的方向移动,从而使得伸缩杆370的一端和勾臂360的内壁脱离,从而开启勾臂360,然后手动将勾臂360挂在挂环170上,然后电磁铁430断电,在弹簧390的作用下,伸缩杆370向远离电磁铁430的方向移动,从而使得伸缩杆370回到正常状态,此时,伸缩杆370的一端重新和勾臂360的内壁接触,从而封闭勾臂360,能够防止挂环170脱离于勾臂360。
[0044]
此外,本垃圾车还包括第二液压缸270;第二液压缸270的底座铰接于第一竖壁210;第二液压缸270的伸缩杆370铰接于第一连接臂230的中部。且第一液压缸260和第二液压缸270彼此平行,且第一液压缸260和第二液压缸270分别位于第一连接臂230的两侧。
[0045]
通过设置第一液压缸260和第二液压缸270,提升了对于提拉臂的驱动能力。
[0046]
同时,底板150还开设有第一定位槽(未示出);车架120的上表面还设置有与第一定位槽配合嵌套的第一定位柱280;第一定位柱280能嵌入第一定位槽中,以限制垃圾箱130于车架120上的移动。定位柱的顶部设置有缓冲垫层(未示出)。这样设置,保证了垃圾箱130位于车架120上时的位置稳定性,防止出现垃圾箱130移位。
[0047]
此外,底板150还开设有第二定位槽(未示出);车架120的上表面还设置有与第二定位槽配合嵌套的第二定位柱290;第二定位柱290能嵌入第二定位槽中,以限制垃圾箱130于车架120上的移动。
[0048]
同时,本垃圾车还包括滑动辊330;滑动辊330转动连接于车架120的远离车头110的一侧;滑动辊330水平设置;滑动辊330垂直于车架120的长度方向。
[0049]
如附图4所示,通过设置滑动辊330,垃圾箱130在提拉时,底板150能够和滑动辊330接触,以便于对垃圾箱130进行提拉。
[0050]
此外,本垃圾车还包括2个第一支撑臂350和2个第二支撑臂340;滑动辊330的两端分别转动连接于2个第一支撑臂350;2个第一支撑臂350均固定连接于车架120的远离车头110的一侧;2个第一支撑臂350均倾斜设置。
[0051]
其中一个第二支撑臂340的一端固定连接于其中一个第二支撑臂340的中部,其中一个第二支撑臂340的另一端固定连接于车架120的远离车头110的一侧;另一个第二支撑臂340的一端固定连接于另一个第二支撑臂340的中部,另一个第二支撑臂340的另一端固定连接于车架120的远离车头110的一侧;2个第二支撑臂340均水平设置。
[0052]
通过上述技术方案,完善了滑动辊330转动连接于车架120的远离车头110的一侧的结构。
[0053]
同时,本垃圾车还包括固定组件;固定组件包括转板310、转臂320和固定板450;固定板450水平固定连接于垃圾箱130的侧壁;固定板450的下表面和底板150的下表面共面。
[0054]
转板310水平转动连接于车架120的上表面的靠近车头110处;转臂320竖直固定连接于转板310的上表面;转板310能转动至贴合盖压固定板450的上表面。
[0055]
通过上述技术方案,能够对位于车架120上的垃圾箱130进行竖直方向的限制,起到压紧作用,防止垃圾箱130在运输过程中晃动。
[0056]
此外,本垃圾车还包括控制开关(未示出);控制开关用于控制第一液压缸260和第二液压缸270的伸缩。以便于操作人员使用本垃圾车。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips