
 商标分类
商标分类  商标转让
商标转让 
一种空箱堆高机及自动控制的方法与流程
 2021-02-19 19:02:32|
2021-02-19 19:02:32| 460|
460| 起点商标网
起点商标网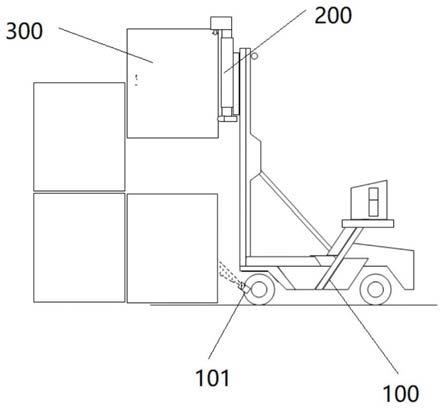
[0001]
本发明涉及一种空箱堆高机及自动控制的方法。
背景技术:
[0002]
空箱堆高机是集装箱运输的关键设备,广泛用于港口、码头、铁路公路中转站及堆场内的集装箱空箱的堆垛和转运,具有堆码层数高、堆垛和搬运速度快、作业效率高、机动灵活、节约场地等特点,其中空箱堆高机的起重系统反映堆高机的起重能力和装卸效率,是决定堆高机作业生产率的重要因素,这里空箱堆高机的作业生产率取决于其起重系统的起升和下降速度。
[0003]
堆高机的起升装置主要由内门架、外门架、升降缸、倾斜缸、吊具等部件组成,堆高机通过控制内、外门架之间的升降缸驱动内门架升降,从而使连接于内门架的吊具升降。
[0004]
堆高机的吊具由承载横梁01和从承载横梁01两头向外伸缩的两根伸缩梁总成构成如图1所示,伸缩梁包括左伸缩梁02-1和右伸缩梁02-2。吊具位于集装箱侧面,伸缩梁可在伸缩缸的驱动下横向伸缩,左伸缩梁02-1向左伸缩,右伸缩梁02-2向右伸缩,满足20英尺和40英尺的集装箱操作。伸缩梁外端有垂直缸筒,左伸缩梁02-1外端的是左垂直缸筒03-1,右伸缩梁02-2外端的是右垂直缸筒03-2,在一对垂直缸筒内分别设置有能够上下移动的臂架头,臂架头的上端分别设置有旋锁装置,同样,臂架头和旋锁装置均具有左右两个,分别称为左臂架头04-1和右臂架头04-2、左旋锁装置05-1和右旋锁装置05-2,左臂架头活动杆06-1和右臂架头活动杆06-2。吊具通过导向角板与集装箱对齐时,旋锁装置即插入集装箱角孔内,旋转90
°
后就可以锁紧集装箱进行吊运。
[0005]
在实际吊运过程中经常发现在吊具40英尺状态时,也就是左伸缩梁02-1和右伸缩梁02-2从承载梁01两端向外伸时,吊具左伸缩梁02-1和右伸缩梁02-2与吊具承载横梁01结合位置,出现严重磨损或者开裂后;左垂直缸筒内左臂架头04-1与左臂架头活动杆06-1连接处和右垂直缸筒内右臂架头04-2与右臂架头活动杆06-2连接处频繁冲击开裂,如图1中用断裂线围起来的地方,存在较大的安全隐患;现在所采用的方法是,出现严重磨损或者开裂后,采取割补的方式进行维修,但是磨损或者开裂问题仍无法得到解决,一段时间后需要再次进行割补维修;另外,对进行多次割补后会影响其整体强度而影响其使用寿命,失去修理价值进行报废处理,吊具使用寿命远远低于设计寿命,据统计,堆高机的吊具在使用2-3年吊具伸缩梁与吊具承载横梁结合位置开始出现裂纹,常发生在伸缩梁的底部。
[0006]
据码头不完全统计,从2015-2019年间58台堆高机吊具开裂情况如下(含再次修复):
[0007][0008]
分析原因包括以下几点:
[0009]
吊具设计强度不足,吊具制造过程焊接缺陷。
[0010]
违规操作,未执行吊具对箱时减速轻放及慢起,吊具升降速度过快,冲击力过大,使吊具频繁冲击疲劳,超出设计范畴。
[0011]
操作拖架高低差够大的空箱时,多次操作失误(单边钩箱,另一边悬空快速下降)。
技术实现要素:
[0012]
本发明的目的是针对目前空箱堆高机由于本身的缺陷加上违规操作,吊具开裂时有发生,提供一种空箱堆高机及自动控制的方法。
[0013]
本发明的技术方案是:一种空箱堆高机,包括内门架、外门架、升降缸、吊具;所述的升降缸设置在所述的内门架和外门架之间,驱动内门架升降;所述吊具连接于内门架上与内门架一起升降,包括承载横梁和从所述的承载横梁两头向外水下水平伸缩的伸缩梁,在伸缩梁的末端设置有垂直臂筒,所述的垂直臂筒内分别设置有能够上下移动的臂架头,臂架头的上端分别设置有旋锁装置;还包括控制系统,所述的控制系统包括处理器和传感器,所述的传感器为设置在所述的外门架下方的测距传感器,所述的处理器与测距传感器相连,根据测距传感器的输出结果控制所述的升降缸工作。
[0014]
进一步的,上述的空箱堆高机中:所述的测距传感器为可距离调整的超声波距离传感器,安装高度为500mm,仰角为45度。
[0015]
进一步的,上述的空箱堆高机中:在所述的臂架头和垂直缸筒之间设置有臂架头结合检测开关,所述的臂架头结合检测开关与处理器相连。
[0016]
本发明还提供了一种空箱堆高机自动控制的方法,该方法包括以下步骤:
[0017]
a、空箱堆高机在堆垛堆箱或者取箱的时,
[0018]
a1、检测大车靠近堆垛集装箱距离;
[0019]
a2、当大车靠近堆垛集装箱距离1-1.5米时,实现对吊具的升降自动减速;
[0020]
b、空箱堆高机在空箱落地时,
[0021]
b1、检测空箱下降时离地面的高度;
[0022]
b2、当空箱下降离地大约1-1.5米时,实现对吊具的升降自动减速;
[0023]
c、空箱堆高机在拖车装箱或者卸箱时;
[0024]
c1、检测大车靠近拖车距离;
[0025]
c2、当大车靠近拖车距离大约1-1.5米时,实现对吊具的升降自动减速。
[0026]
进一步的,上述的空箱堆高机自动控制的方法中:
[0027]
空箱堆高机在堆垛取箱,拖车卸箱时,空吊具将以一级减速后速度下降,并将旋锁装置插入集装箱角孔内,当任意一侧有着陆信号或任意一个臂架头结合检测开关断开时,
对吊具的升降速度实现第二级减速,吊具将以二级减速后的速度缓慢下降至两侧都有着陆信号反馈时,吊具下降自动停止;如吊具下降只有单侧有着陆信号或两侧都没有着陆信号反馈时,吊具将缓慢继续下降至任意一个垂直缸筒下停止开关感应动作,吊具下降自动停止;
[0028]
空箱堆高机在堆垛堆箱,拖车装箱时,堆高机吊运空箱将以一级减速后速度下降,当任意一侧有着陆信号或任意一个臂架头结合检测开关断开时,对吊具的升降速度实现第二级减速,吊具将以二级减速后的速度缓慢下降至两侧都有着陆信号反馈或时,或任意一个垂直缸筒下停止开关感应动作,吊具下降自动停止;
[0029]
空箱堆高机在堆垛取箱,拖车卸箱时,空吊具将以一级减速后速度下降,当任意一个臂架头结合检测开关断开时,对吊具的升降速度实现第二级减速,吊具将以二级减速后的速度缓慢下降至任意一个垂直缸筒下停止开关感应动作,吊具下降自动停止。
[0030]
本发明中在空箱堆高机中加入控制系统,利用检测到状态信息,实现对吊具工作的控制,克服操作失误。
[0031]
以下将结合附图和实施例,对本发明进行较为详细的说明。
附图说明
[0032]
附图1是现有技术中空箱堆高机吊具结构图。
[0033]
附图2是本发明实施例1超声波测距传感器前方无物件。
[0034]
附图3是本发明实施例1超声波测距传感器对前方堆垛集装箱检测有效。
[0035]
附图4是本发明实施例1安装有超声波测距传感器堆高机。
[0036]
附图5是本发明实施例1接近开关示意图。
具体实施方式
[0037]
实施例1,本实施例解决了自动识别堆垛堆/取箱、拖车装/卸箱对箱和空箱落地的工况,实现对吊具的升降自动减速,即原由人工控制吊具升降速度转变为堆高机自动控制,其他情况则保持全速,不影响装卸效率。本实施例中,装置在空箱堆高机100外门架102下方安装一个可距离调整的超声波距离传感器101,安装高度为500mm,仰角为45度。超声波传感器检测距离设定为1.5-2.0米,确保堆高机在大车靠近堆垛集装箱或拖车距离大约1-1.5米时,超声波传感器能有效检测并反馈信号,实现对吊具的升降自动减速;同时在堆高机吊运空箱200下降到离地面约1米时,超声波传感器能有效检测并反馈信号;实现对吊具的升降自动减速。如图2、3所示。
[0038]
本实施例中,空箱堆高机100,包括内门架103、外门架102、升降缸104、吊具200;超声波距离传感器101外门架102下方,如图4所示。
[0039]
本实施例中,门架包含内门架103和外门架102,内门架103套在外门架102里面,在外门架102内通过升降缸104和大链条105驱动内门架103上下运动。内门架103通过小链条106带动吊具200上下运动,小链条106连接吊具200的承载横梁201上,承载横梁201两端分别伸出左伸缩梁202-1和右伸缩梁202-2。
[0040]
本实施例中,升降缸301设置在内门架103和外门架102之间,驱动内门架103升降;吊具200连接于内门架103上与内门架103一起升降,包括承载横梁201和从承载横梁201两
头向外水平伸缩的伸缩梁,也就是左伸缩梁202-1和右伸缩梁202-2,在伸缩梁的末端设置有垂直缸筒,分别是左垂直缸筒203-1和右垂直缸筒203-2;垂直缸筒内分别设置有能够上下移动的活动杆和臂架头,分别是左臂架头204-1和左臂架头活动杆206-1,右臂架头204-2和右臂架头活动杆206-2,的上端分别设置有旋锁装置,分别是左旋锁装置205-1和右旋锁装置205-2,如图4所示。实践中,旋锁装置中的旋锁及集装箱箱孔均为鹅蛋型,当旋锁插入集装箱箱孔后,旋锁旋转90度,即旋锁装置将集装箱锁上。
[0041]
本实施例中,还包括控制系统,控制系统包括处理器和传感器,传感器为设置在所述的外门架下方的超声波距离传感器101,处理器与超声波距离传感器101相连,根据超声波距离传感器101的输出结果控制所述的升降缸104工作。
[0042]
本实施例也综合考虑了左垂直缸筒203-1和右垂直缸筒203-2内的左臂架头活动杆206-1和右臂架头活动杆206-2上下移动的只有220mm的高度,如果将吊具200的升降速度减速后速度设置太低,则降低装卸效率;如果减速后速度设置太高,则吊具200伸缩梁与吊具承载横梁之间、吊具臂架头和垂直缸筒之间、空箱与拖车等的冲击仍然很大。也就是左伸缩梁202-1和右伸缩梁202-2从承载梁201两端向外伸时,吊具200左伸缩梁202-1和右伸缩梁202-2与吊具承载横梁201结合位置,出现严重磨损或者开裂后;左垂直缸筒203-1内左臂架头204-1与左臂架头活动杆206-1连接处和右垂直缸筒203-2内右臂架头204-2与右臂架头活动杆206-2连接处频繁冲击开裂。为此,在两侧吊具200臂架头和垂直缸筒各安装1个接近开关210,如图5所示,将臂架头和垂直缸筒之间定义为臂架头结合部,安装在臂架头的接近开关210检测臂架头和垂直缸筒结合状态,用于实现任意一个臂架头结合检测开关断开时(即臂架头和垂直缸筒离开时)第二级减速。在两侧垂直缸筒各安装1个接近开关(定义为垂直缸筒下停止开关),通过连接于臂架头,随臂架头上下移动的感应挡块设定臂架头上下移动的高度,实现任意一个垂直缸筒下停止开关感应动作时吊具下降停止,确保垂直缸筒下降小于220mm的高度,避免垂直缸筒冲击臂架头活动杆的下部及吊具持续下降导致链条和油管/电缆松弛过多,造成链条碰击起升油缸活塞杆,油管/电缆钩挂周边附属物而损伤。
[0043]
本实施例通过超声波传感器和接近开关信号反馈到控制器,对吊具的升降速度实现一级减速或二级减速,实现吊具堆垛堆/取箱、拖车装/卸箱、空箱落地,吊具下降和起升时能自动慢放,轻起,使吊具伸缩梁与吊具承载横梁之间、吊具臂架头和垂直缸筒之间冲击力明显降低,延长吊具使用寿命。
[0044]
1、当堆高机空吊具或吊运空箱大车靠近堆垛集装箱或拖车距离大约1-1.5米时,超声波传感器能检测到信号并反馈到控制器,对吊具的升降速度实现一级减速。
[0045]
2、堆垛取箱,拖车卸箱(箱面平整而且旋锁插入集装箱角孔情况),空吊具将以一级减速后速度下降,并将旋锁装置插入集装箱角孔内,当任意一侧有着陆信号或任意一个臂架头结合检测开关断开时(即臂架头和垂直缸筒离开时),对吊具的升降速度实现第二级减速,吊具将以二级减速后的速度缓慢下降至两侧都有着陆信号反馈时,吊具下降自动停止;如吊具下降只有单侧有着陆信号或两侧都没有着陆信号反馈时,吊具将缓慢继续下降至任意一个垂直缸筒下停止开关感应动作,吊具下降自动停止;此工况适用于拖车车架不平整(前高后底)的装/卸箱操作。
[0046]
3、堆垛堆箱,拖车装箱,堆高机吊运空箱将以一级减速后速度下降,当任意一侧有着陆信号或任意一个臂架头结合检测开关断开时(即臂架头和垂直缸筒离开时),对吊具的
升降速度实现第二级减速,吊具将以二级减速后的速度缓慢下降至两侧都有着陆信号反馈或时,或任意一个垂直缸筒下停止开关感应动作,吊具下降自动停止。
[0047]
4、堆垛取箱,拖车卸箱(旋锁未能插入集装箱角孔,单侧或两侧臂架头箱挂在箱角时的操作失误情况),空吊具将以一级减速后速度下降,当任意一个臂架头结合检测开关断开时(即臂架头和垂直缸筒离开时),对吊具的升降速度实现第二级减速,吊具将以二级减速后的速度缓慢下降至任意一个垂直缸筒下停止开关感应动作,吊具下降自动停止。有效避免垂直缸筒冲击臂架头活动杆的下部及吊具持续下降导致链条和油管/电缆松弛过多,造成链条碰击起升油缸活塞杆,油管/电缆钩挂周边附属物而损伤。
[0048]
5、堆高机吊运空箱落地,当空箱下降到箱底离地面约1米时,安装在空箱堆高机外门架下方的超声波传感器也能检测到信号并反馈到控制器,对吊具的升降速度实现一级减速,直至空箱落地及两侧都有着陆信号反馈时,吊具下降自动停止。
[0049]
6、堆垛堆/取箱、拖车装/卸箱和空箱落地开锁或闭锁后吊具上升,由于着陆信号或臂架头结合检测开关断开信号保持,吊具将以二级减速速度上升,此时吊具伸缩梁与吊具承载横梁之间、吊具臂架头和垂直缸筒之间的作用力方向将倒置,但以二级减速速度上升,其冲击力明显减少,冲击力可通过设定二级减速速度调整;在吊具着陆信号自动断开后延时2秒,吊具上升速度将自动切换至以一级减速速度上升;在大车倒后至堆垛集装箱或拖车距离大于1-1.5米,超声波传感器无检测到信号反馈时,吊具升降速度将自动至全速。
[0050]
7、一级减速速度设定,由于不同堆高机升降速度不同,一级减速的速度以堆高机吊运空箱从高处落地至箱底接触地面情况设定,如果一级减速的速度设定过高,箱底对地面冲击很大,设定过低则影响操作效率。
[0051]
8、二级减速速度设定,将垂直缸筒下降至垂直缸筒下停止位置,吊具以二级减速的速度上升,观察垂直缸筒与臂架头接触的冲击,如果二级减速的速度设定过高,垂直缸筒与臂架头接触瞬间的冲击很大,设定过低则影响操作效率。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips