
 商标分类
商标分类  商标转让
商标转让 
一种搬运机器人的制作方法
 2021-02-19 10:02:01|
2021-02-19 10:02:01| 326|
326| 起点商标网
起点商标网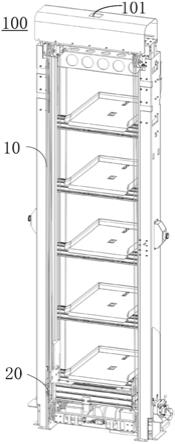
[0001]
本实用新型实施例涉及智能仓储领域,尤其涉及一种搬运机器人。
背景技术:
[0002]
智能仓储是物流过程的一个环节,智能仓储的应用,保证了货物仓库管理各个环节数据输入的速度和准确性,确保企业及时准确地掌握库存的真实数据,合理保持和控制企业库存。通过科学的编码,还可方便地对库存货物的批次、保质期等进行管理。利用snhges系统的库位管理功能,更可以及时掌握所有库存货物当前所在位置,有利于提高仓库管理的工作效率。其中,搬运机器人在智能仓储中扮演着重要的角色,搬运机器人能够接受指令到指定位置取放、搬运货物,提高了仓库中搬运的效率。
[0003]
目前,搬运机器人的固定立柱高度固定,搬运装置只能在固定立柱所设定的行程内进行升降,而当需要搬运的货物高于固定立柱的高度时,搬运装置无法对该些货物进行搬运,使用起来较为不便。
技术实现要素:
[0004]
为了解决上述技术问题,本实用新型实施例提供了一种使用方便的搬运机器人。
[0005]
本实用新型实施例解决其技术问题采用以下技术方案:
[0006]
提供一种搬运机器人,包括:
[0007]
移动底盘;
[0008]
固定立柱架,安装于所述移动底盘;
[0009]
活动立柱架,活动安装于所述固定立柱架,并且所述活动立柱架可沿所述固定立柱架的长度方向相对于所述固定立柱架移动;
[0010]
搬运装置,活动安装于所述活动立柱架,并且所述搬运装置可沿所述活动立柱架的长度方向相对于所述活动立柱架移动;
[0011]
驱动组件,连接所述搬运装置,所述驱动组件用于驱动所述搬运装置相对于所述活动立柱架运移动,和/或,驱动所述活动立柱架相对于所述固定立柱架运动。
[0012]
在一些实施例中,所述驱动组件包括收放组件、牵引绳以及导轮组,所述导轮组包括顶滑轮、底滑轮以及主滑轮;
[0013]
所述顶滑轮安装于所述活动立柱架远离所述移动底盘的一端,所述底滑轮安装于所述活动立柱架的另一端,所述主滑轮安装于所述固定立柱架远离所述移动底盘的一端,所述牵引绳的一端依次绕过所述顶滑轮、所述底滑轮以及所述主滑轮后系于所述收放组件,所述收放组件收拢或释放所述牵引绳,以驱动所述搬运装置相对于活动立柱架运移动,和/或,驱动所述活动立柱架相对于所述固定立柱架运动。
[0014]
在一些实施例中,所述固定立柱架包括第一固定柱、第二固定柱以及固定横梁,所述第一固定柱与所述第二固定柱的一端分别与所述移动底盘相连接,所述固定横梁的两端分别与所述第一固定柱以及所述第二固定柱的另一端相连接,所述活动立柱架可活动地安
装于所述第一固定柱与所述第二固定柱之间,其中,所述主滑轮安装于所述固定横梁;
[0015]
所述活动立柱架包括第一活动柱、第二活动柱、顶横梁以及底横梁,所述第一固定柱以及所述第二固定柱分别设有第一收容槽以及第二收容槽,所述第一活动柱收容于所述第一收容槽内,所述第二活动柱收容于所述第二收容槽内,所述顶横梁的两端分别与所述第一活动柱以及所述第二活动柱的一端连接,所述底横梁的两端分别与所述第一活动柱以及所述第二活动柱的另一端连接,其中,所述顶滑轮可拆卸地安装于所述顶横梁,所述底滑轮可拆卸地安装于所述底横梁。
[0016]
在一些实施例中,所述收放组件包括绕线筒、传动轴、调速箱以及电机,所述绕线筒用于缠绕所述牵引绳,所述电机的输出轴与所述调速箱的输入端连接,所述调速箱的输出端安装所述传动轴,所述传动轴用于带动所述绕线筒转动;
[0017]
所述导轮组还包括张紧轮,所述张紧轮可拆卸地安装于所述活动立柱架远离所述移动底盘的一端,且所述张紧轮位于所述顶滑轮与所述底滑轮之间。
[0018]
在一些实施例中,还包括第一检测器,所述第一检测器安装于所述活动立柱架远离所述移动底盘的一端,所述第一检测器与所述驱动组件连接,所述第一检测器用于检测所述活动立柱架与其上方的建筑物体的距离。
[0019]
在一些实施例中,还包括制动装置,所述制动装置用于对所述活动立柱架进行制动,使得所述活动立柱架相对所述固定立柱架停止移动。
[0020]
在一些实施例中,所述制动装置包括制动盘、导向底座以及止动件;
[0021]
所述制动盘与所述驱动组件连接,所述驱动组件的输出端可驱动所述制动盘转动,并且所述制动盘可制动所述驱动组件的输出端,所述制动盘设有至少一个销孔,所述导向底座安装于所述固定立柱架,所述导向底座设有插槽,所述止动件活动插入所述插槽,所述止动件可沿所述插槽移动,以使得所述止动件的一端插入或脱离所述销孔,以阻止所述制动盘转动或解除对所述制动盘的限制。
[0022]
在一些实施例中,还包括凸轮,所述凸轮位于所述导向底座背离所述制动盘的一侧,所述止动件远离制动盘的一端与所述凸轮转动连接,所述凸轮的轮面与所述导向底座背向所述制动盘的一面相抵,以使得所述凸轮转动时带动所述止动件沿所述插槽移动;
[0023]
所述制动装置还包括弹性件,所述弹性件的一端连接所述止动件,所述弹性件的另一端连接所述导向底座或所述固定立柱架,所述弹性件用于提供使所述凸轮与所述导向底座相抵接,以及使所述止动件保持静止的弹性力。
[0024]
在一些实施例中,还包括主减震件;
[0025]
所述主减震件安装于所述固定立柱架靠近所述移动底盘的一端,并位于所述活动立柱架的下方;
[0026]
当所述活动立柱架下降至所述预设升降行程的最低点时,所述活动立柱架与所述主减震件相抵接。
[0027]
在一些实施例中,还包括货叉安装组件,所述货叉安装组件安装于所述活动立柱架,所述货叉安装组件可沿所述活动立柱架的长度方向相对所述活动立柱架运动,所述搬运装置安装于所述货叉安装组件;
[0028]
当所述货叉安装组件受到沿着所述固定立柱架的轴向方向的拉力时,可使得所述货叉安装组件于预设升降行程内上升或下降。
[0029]
在一些实施例中,还包括副减震件,所述副减震件安装于所述活动立柱架远离所述移动底盘的一端;
[0030]
当所述货叉安装组件上升至所述预设升降行程的最高点时,所述货叉安装组件与所述副减震件相抵接。
[0031]
本实用新型实施例的有益效果是:本实用新型实施例的搬运机器人,包括移动底盘固定立柱架、活动立柱架、搬运装置以及驱动组件。固定立柱架移动底盘,活动立柱架安装于固定立柱架。搬运装置连接活动立柱架,并且搬运装置可沿活动立柱架的长度方向相对于活动立柱架移动。驱动组件连接所述搬运装置,驱动组件用于驱动搬运装置相对于活动立柱架运移动,和/或,驱动搬运装置和活动立柱架同时相对于固定立柱架运动。通过上述结构,当需要搬运位置较高的货物时,活动立柱架可相对于固定立柱架向外伸出,以便对高处货物进行搬运,使用场景更广泛且方便。
附图说明
[0032]
一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
[0033]
图1是本实用新型其中一个实施例的搬运机器人的结构示意图;
[0034]
图2是图1的另一角度的示意图;
[0035]
图3是图1中固定立柱架的结构示意图;
[0036]
图4是图3的部分结构的示意图;
[0037]
图5是图1中的活动立柱架的结构示意图;
[0038]
图6是图5的部分结构的示意图;
[0039]
图7是图1中货叉安装组件的结构示意图;
[0040]
图8是图1的部分结构的示意图;
[0041]
图9是图8的a部的局部放大图;
[0042]
图10是图1部分结构的示意图;
[0043]
图11是图10的部分结构示意图;
[0044]
图12是图10的另一部分的结构示意图;
[0045]
图13是图8的b部的结构示意图;
[0046]
图14是图13的制动装置的结构示意图;
[0047]
图15是图14的制动装置的剖视图。
具体实施方式
[0048]
为了便于理解本实用新型,下面结合附图和具体实施例,对本实用新型进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“上”、“下”、“内”、“外”、“垂直的”、“水平的”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指
的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0049]
除非另有定义,本说明书所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本实用新型。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
[0050]
此外,下面所描述的本实用新型不同实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
[0051]
如图1和图2所示,本实用新型其中一个实施例的搬运机器人100,包括移动底盘(图未示)、固定立柱架10、活动立柱架20、搬运装置(图未示)以及驱动组件(未标示),所述固定立柱架10的一端安装于所述移动底盘,所述活动立柱架20活动安装于所述固定立柱架10,且所述活动立柱架20可沿所述固定立柱架10的长度方向相对于所述固定立柱架10移动,其中,所述活动立柱架20可在预设行程内升降。所述搬运装置连接所述活动立柱架20,并且所述搬运装置可沿所述活动立柱架20的长度方向相对于所述活动立柱架移动。所述驱动组件连接所述搬运装置,所述驱动组件用于驱动所述搬运装置相对于活动立柱架20运移动,和/或,驱动所述活动立柱架20相对于所述固定立柱架10运动。其中,移动底盘承载所述固定立柱架10、活动立柱架20、搬运装置(图未示)以及驱动组件,移动底盘用于实现搬运机器人100在地面移动,所述搬运装置用于实现搬运机器人100对货物的拾取与放置。
[0052]
请参看图3与图4,对于所述固定立柱架10,其包括第一固定柱11、第二固定柱12以及固定横梁13,所述第一固定柱11与所述第二固定柱12的一端用于与所述移动底盘相连接,且所述第一固定柱11与所述第二固定柱12以预设间距设置,所述固定横梁13的两端分别与所述第一固定柱11以及所述第二固定柱12的另一端相连接,其中,所述第一固定柱11以及所述第二固定柱12分别设有第一收容槽111以及第二收容槽121。所述活动立柱架20可活动地安装于所述第一固定柱11与所述第二固定柱12之间,活动立柱架20沿第一固定柱11与所述第二固定柱12运动。
[0053]
可理解的,上述预设间距的具体数值不作限定,可是依据实际需要而调整所述第一固定柱11与所述第二固定柱12的中心轴线的距离。
[0054]
请参看图5-6,对于所述活动立柱架20,其包括第一活动柱21、第二活动柱22以及活动横梁组23,所述第一活动柱21收容于所述第一收容槽内111,所述第一活动柱21可沿第一收容槽内111移动,所述第二活动柱22收容于所述第二收容槽121内,所述第二活动柱22可沿第二收容槽移动,所述活动横梁组23的两端分别与所述第一活动柱21以及所述第二活动柱22连接,以使所述第一活动柱21与所述第二活动柱22同步移动。其中,所述第一活动柱21与所述第二活动柱22亦以另一预设间距对称设置,且所述第一活动柱21以及所述第二活动柱22的间距小于所述第一固定柱11以及所述第二固定柱12之间的间距。
[0055]
所述活动横梁组23包括顶横梁231以及底横梁232,所述顶横梁231以及所述底横梁232分别位于所述活动立柱架20的两端,具体的,所述顶横梁231的两端分别与所述第一活动柱21以及所述第二活动立柱22的一端连接,所述底横梁232的两端分别与所述第一活动柱21以及所述第二活动立柱22的另一端连接。其中,所述底横梁232由第一折弯板2321、
第二折弯板2322以及横梁条2323所组成,所述横梁条2323的两端分别与所述第一折弯板2321以及所述第二折弯板2322的一端连接,所述第一折弯板2321以及所述第二折弯板2322的另一端分别与所述第一活动柱21以及所述第二活动柱22的一端连接。
[0056]
请参看图3和图5,在一些实施例中,所述搬运机器人还包括导向组件30,所述导向组件包括30包括导向块31以及导轨32,所述导向块31包括第一导向块311以及第二导向块312,所述导轨32包括第一导轨321以及第二导轨322。其中,所述第一导向块311以及所述第二导向块312分别安装于所述第一收容槽111以及所述第二收容槽121的槽底,所述第一导轨321以及所述第二导轨322分别设置于所述第一活动柱21以及所述第二活动柱22的侧壁上,所述导向块31与所述导轨32相对滑动,以使所述活动立柱架20可相对于所述固定立柱架10在预设行程内升降。由此,所述活动立柱架20可在所述导轨32设定的预设行程内相对于所述固定立柱架10进行伸缩。
[0057]
这里要说明的是,上述所述预设行程由所述导轨32所决定,在本实施例中,所述导向块31位于所述固定立柱架20远离所述移动底盘的一端,并且靠近所述固定立柱架20的顶端,以防止所述活动立柱架20未伸长至最高处时所述导向块31与所述导轨32相分离。
[0058]
在一些实施例中,所述第一导向块311以及所述第二导向块312分别安装于所述第一活动柱21以及所述第二活动柱22的侧壁上,所述第一导轨321以及所述第二导轨322分别设置于所述第一收容槽111以及所述第二收容槽121的槽底,所述导向块31与所述导轨32相对滑动,以使所述活动立柱架20可相对于所述固定立柱架10在预设行程内升降。在此实施例中,所述第一导向块311以及所述第二导向块312分别设置于所述第一活动柱21以及所述第二活动柱22靠近所述移动底盘的一端,以使所述活动立柱架20未活动至预设行程的最高处时,所述导向块31始终与所述导轨32相配合而不脱离。
[0059]
请参看图4,所述搬运机器人100还包括主减震件40。所述主减震件40安装于所述固定立柱架10靠近所述移动底盘的一端,并位于所述活动立柱架20的下方,当所述活动立柱架20下降至所述预设升降行程的最低点时,所述活动立柱架20与所述主减震件40相抵接。所述主减震件40用于缓冲所述活动立柱架20下降时产生的冲击力。
[0060]
在一些实施例中,所述固定立柱架10还包括限位挡板113,所述限位挡板113包括第一限位挡板1131以及第二限位挡板1132,所述第一限位挡板1131以及所述第二限位挡板1132分别安装于所述第一固定柱11以及所述第二固定柱12的一端,所述第一限位挡板1131以及第二限位挡板1132均可拆卸地安装有所述主减震件40。当所述活动立柱架20的一端与所述主减震件40相抵接时,所述活动立柱架20下降至预设行程的最低点。可理解的,所述主减震件40可以是弹簧,也可以是避震器,甚至是硅胶缓冲片,优先地,所述主减震件40采用避震器。具体的,使用时,所述第一限位挡板1131以及所述第二限位挡板1132均设置有通孔(未标示),所述避震器的伸缩端伸出所述通孔,并用于与所述活动立柱架20相抵接。当所述活动立柱架20下降时且与所述避震器的伸缩端相抵接时,所述伸缩端受挤压并逐渐向内收缩,从而逐渐降低所述活动立柱架20下降时所产生的冲击力,以防止所述活动立柱架20与所述固定立柱架10直接发生刚性碰撞。
[0061]
请参看图6与图7,在一些实施例中,所述搬运机器人100还包括货叉安装组件50,所述货叉安装组件50包括第一滑块51、第二滑块52以及连接块53,所述第一活动柱21远离所述第一固定柱11的一侧设置有第一滑轨211,所述第二活动柱22远离所述第二固定柱12
的一侧设置有第二滑轨221,所述第一滑块51活动安装于所述第一滑轨211,所述第二滑块52活动安装于所述第二滑轨221,所述连接块53的两端分别的与所述第一滑块51以及所述第二滑块52可拆卸地连接,且所述连接块53上设有挡片531。具体的,使用时,所述货叉安装组件50受到沿着所述固定立柱架10的轴向方向的拉力时,所述第一滑块51以及所述第二滑块52分别沿着所述第一滑轨211以及所述第二滑轨221滑动,以使所述货叉安装组件50于预设升降行程内上升或下降。在本实施例中,所述搬运装置安装于所述货叉安装组件50,所述搬运装置可以通过所述货叉安装组件50同步进行上升或下降,以便于所述搬运机器人实现搬运货物。
[0062]
如图8和图9所示,在一些实施例中,所述搬运机器人100还包括副减震件60,所述副减震件60安装于所述活动立柱架20远离所述移动底盘的一端,用以防止所述货叉安装组件50与所述活动立柱架20之间产生猛烈碰撞。同样的,所述副减震件60可以是弹簧,也可以是避震器,甚至是硅胶缓冲片,优先地,所述副减震件60采用避震器。
[0063]
使用时,所述第一活动柱21以及所述第二活动柱22远离所述移动底盘的一端设置有开口罩24,具体的,所述开口罩24设置于所述第一滑轨211以及所述第二滑轨221的一端,所述开口罩24朝向所述移动底盘的一端设置有通口,所述避震器安装于所述开口罩24内,且所述避震器的伸缩端穿过所述通口,用以与所述货叉安装组件50相抵接。当所述第一滑块51以及所述第二滑块52分别沿着所述第一滑轨211以及所述第二滑轨221上升至最高处时,所述第一滑块211以及所述第二滑块221分别与所述副减震件60相抵接,以防止所述第一滑块211与所述第二滑块221与所述活动立柱架20刚性碰撞。
[0064]
在一些实施例中,所述搬运机器人100还包括行程开关(未标示),所述行程开关安装于所述活动立柱架20靠近所述移动底盘的一端,当所述货叉安装组件50下降至所述活动立柱架20的最低处时,所述挡片531与所述行程开关相抵接,此时所述货叉安装组件50下降至所述预设升降行程的下限位,即所述货叉安装组件50所能下降到的最低位置。
[0065]
请参看图2、8、10-13,在一些实施例中,对于上述所述的驱动组件(未标示),其包括牵引组件70以及收放组件80,其中,所述牵引组件70包括牵引绳71以及导轮组72,所述牵引绳71的一端绕着所述导轮组72并系于所述收放组件80上,所述收放组件80收拢或释放所述牵引绳71,以使所述活动立柱架20相对于所述固定立柱架10升降。可理解的,为了能实现所述活动立柱架20相对于所述固定立柱架10升降,所述牵引绳71的另一端直接或间接系于所述活动立柱架20,以使活动立柱架20受到所述牵引绳71的牵引力以进行升降。在本实施例中,所述牵引绳71的另一端系于所述货叉安装组件50,当所述货叉安装组件50上升至所述活动立柱架20的顶端,所述收放组件80继续收拢所述牵引绳71,此时所述货叉安装组件50顶着所述活动立柱架20同步上升,由此所述牵引绳71间接完成了对所述活动立柱架20的牵引。
[0066]
对于所述牵引绳71,其可以是由钢丝制成的钢丝绳,亦可以是尼龙绳,优先地,所述牵引绳71选用钢丝绳,以确保所述货叉安装组件50上升或下降时,所述牵引绳71不因所述货叉搬运的货物过重而崩断。
[0067]
对于所述导轮组72,其包括顶滑轮721、底滑轮722以及主滑轮723,所述顶滑轮721可拆卸地安装于所述活动立柱架20远离所述移动底盘的一端,所述底滑轮722可拆卸地安装于所述活动立柱架20的另一端,所述主滑轮723安装于所述固定立柱架10远离所述移动
底盘的一端。具体的,在本实施例中,所述顶滑轮721安装于所述顶横梁231,所述底滑轮722安装于所述底横梁232,所述主滑轮723安装于所述固定横梁13,所述牵引绳71的一端依次绕过所述顶滑轮721、所述底滑轮722以及所述主滑轮723后系于所述收放组件80,所述牵引绳71的另一端系于所述货叉安装组件50。由此,当所述收放组件80收拢所述牵引绳71时,所述牵引绳71可直接牵引所述货叉安装组件50升降。
[0068]
在一些实施例中,所述导轮组72还包括张紧轮724,所述张紧轮724可拆卸地安装于所述活动立柱架20远离所述移动底盘的一端,且所述张紧轮724位于所述顶滑轮721与所述底滑轮722之间。具体的,所述张紧轮724顶着所述牵引绳71,即所述牵引绳71的一端先绕过所述顶滑轮721后经由所述张紧轮724后再绕着所述底滑轮722,以防止所述牵引绳71过度绷紧而直接崩断。
[0069]
请参看图13,在一些实施例中,所述收放组件80包括绕线筒81、传动轴82、调速箱83以及电机84,所述绕线筒81用于缠绕所述牵引绳71,所述电机84的输出轴与所述调速箱83的输入端连接,所述调速箱83的输出端与所述传动轴82相连接,所述调速箱83用于调节所述传动轴82的转速,所述传动轴82的一端与所述绕线筒81相连接。具体的,使用时,所述电机84运作,以使所述传动轴82转动,带动所述绕线筒81顺时针或逆时针转动,以释放或收拢所述牵引绳71,从而控制所述货叉安装组件50升降,以及所述活动立柱架20相对于所述固定立柱架10伸缩。
[0070]
在具体使用的过程中,所述货叉安装组件50以及所述活动立柱架20处于初始位置,即位于预设行程的最低位置处。当启动所述电机,所述绕线筒开始收拢所述牵引绳71,系于所述牵引绳71一端的货叉安装组件逐渐上升,当所述货叉安装组件50上升至所述预设升降行程的最高处时,所述副减震件60与所述货叉安装组件50相抵接,此时所述货叉安装组件50的结束上升。当所述电机继续工作,所述绕线筒继续绕线,此时所述货叉安装组件50顶着所述活动立柱架20相对于所述固定立柱架10上升,待所述导向块即将与所述导轨分离时,所述活动立柱架20上升至最高点。另一方面,所述电机反转时,所述绕线筒释放牵引绳,所述活动立柱架20沿着所述固定立柱架10的轴向逐渐下降,当所述活动立柱架20与所述主减震件40相抵接时,所述活动立柱架20停止下降,所述绕线筒继续释放牵引线61,所述货叉安装组件50开始下降,当所述货叉安装组件50碰触所述行程开关时,所述货叉安装组件50下降至最低点,此时控制所述电机停止转动。
[0071]
在一些实施例中,所述搬运机器人100还包括存储货架(未标示),所述存储货架安装于所述固定立柱架10上,具体的,所述固定立柱架10以预设间隔距离设置有若干安装横梁(未标示),所述存储货架安装于所述安装横梁,所述存储货架用于存储所述搬运装置搬运的货物。
[0072]
请复参图1,在一些实施例中,所述搬运机器人100还包括第一检测器101,所述第一检测器101安装于所述活动立柱架20远离所述移动底盘的一端,所述第一检测器101与所述驱动组件连接,所述第一检测器101用于检测所述活动立柱架20与其上方的建筑物体的距离。具体的,第一检测器101安装于所述活动立柱架20的顶横梁231,第一检测器101与驱动组件的电机84连接,第一检测器101可随活动立柱架20运动,并实时检测活动立柱架20的顶端与其上方的建筑物体的距离,当第一检测器101检测出的实时距离小于预设值时,第一检测器101控制电机84暂停工作,以防止活动立柱架20继续朝向其上方的建筑物运动而发
生碰撞,避免搬运机器人100造成损坏以及发生安全事故。
[0073]
在一些实施例中,搬运机器人还包括第二检测器(图未示),第二检测器连接驱动组件的电机84,第二检测器用于检测活动立柱架20相对沿固定固定立柱架10的长度方向移动的两个极限位置,以控制电机84停启。其中,两个极限位置分别为活动立柱架20沿固定立柱架10的长度方向远离移动底盘运动的上极限位置,以及活动立柱架20沿固定立柱架10的长度方向朝向移动底盘运动的下极限位置。在具体实施过程中,第二检测器可以是测距传感器,该测距传感器可直接安装于固定立柱架10靠近移动底盘的一端,并与活动立柱架20的底面相对,或者,第二检测器可以是行程开关组,该行程开关组包括第一行程开关和第二行程开关,第一行程开关安装于固定立柱架10靠近移动底盘的一端,第二行程开关安装于固定立柱架10远离移动底盘的一端,活动立柱架20与第一行程开关对应的一端设置有凸块,当活动立柱架20运动至下极限位置时,凸块触发第一行程开关,当活动立柱架20运动至上极限位置时,凸块触发第二行程开关。
[0074]
请参看图13-15,在一些实施例中,所述搬运机器人100还包括制动装置90,所述制动装置90用于对所述活动立柱架20进行制动,使得所述活动立柱架20相对所述固定立柱架10停止移动。通过设置制动装置90,一方面,可在搬运机器人100进行搬运工作的过程中实现紧急制动,另一方面,可防止搬运机器人100的驱动组件误启。
[0075]
所述制动装置90包括制动盘91、导向底座92以及止动件93。
[0076]
所述制动盘91与所述驱动组件连接,所述驱动组件的输出端可驱动所述制动盘91转动,并且所述制动盘91可制动所述驱动组件的输出端,所述制动盘91设有至少一个销孔9101,所述导向底座92安装于所述固定立柱架10,所述导向底座92设有插槽9201,所述止动件93活动插入所述插槽9201,所述止动件93可沿所述插槽9201移动,以使得所述止动件93的一端插入或脱离所述销孔9101,从而阻止所述制动盘91转动或解除对所述制动盘91的限制。其中,当所述止动件93的一端插入所述销孔9101时,所述制动盘91实现对所述驱动组件的输出端的制动,使得驱动组件停止驱动。
[0077]
在本实施例中,制动盘91与绕线筒81连接并与绕线筒81同轴设置,制动盘91可随绕线筒221一同转,并且,至少一个销孔9101沿制动盘91的圆周侧壁设置,也即销孔9101径向设置于制动盘91,止动件93设置于制动盘91的圆周侧壁的一侧,在制动盘91转动时,止动件93的一端可对准制动盘91侧壁上的其中任意一个销孔9101并插入该销孔9101。
[0078]
所述制动装置90还包括凸轮94,所述凸轮94位于所述导向底座92背离所述制动盘91的一侧,所述止动件93远离制动盘91的一端与所述凸轮94转动连接,所述凸轮94的轮面与所述导向底座92背向所述制动盘91的一面相抵,以使得所述凸轮94转动时带动所述止动件93沿所述插槽9201移动。
[0079]
所述制动装置90还包括弹性件95,所述弹性件95的一端连接所述止动件93,所述弹性件95的另一端连接所述导向底座92或所述固定立柱架10,所述弹性件95用于提供使所述凸轮94与所述导向底座92相抵接,以及使所述止动件93保持静止的弹性力。其中,弹性件95为压簧,当然弹性件95也可以为其他具有弹性力的部件,例如,片簧等。
[0080]
在本实施例中,所述止动件93包括第一插销931、连接杆932以及第二插销933。所述第一插销931活动插入所述插槽9201,所述第一插销931远离所述制动盘91的一端与凸轮94连接,所述连接杆932的一端连接所述第一插销931的另一端,所述第一插销931两端之间
的中部凸设有挡圈9311,插槽9201的槽壁凸设有抵接部9202,抵接部9202位于挡圈9311与凸轮94之间,弹性件95套设于所述第一插销931,并且弹性件95抵接于挡圈9311和抵接部9202之间,也即弹性件95弹性压缩于挡圈9311和抵接部9202之间,弹性件95始终保持弹性压缩状态。所述连接杆932的另一端连接所述第二插销933的一端,所述第一插销931可沿所述插槽9201移动,以使得所述第二插销933的另一端插入或脱离所述销孔9101。优选地,第一插销931和第二插销933均与连接杆932垂直设置。
[0081]
制动装置90还包括引导件96,引导件96安装于固定立柱架10,引导件96设有导槽9601,连接杆932穿过导槽9601,连接杆932可沿导槽9601滑动,以防止第一插销931沿插槽9201移动时第一插销931发生转动。
[0082]
在一些实施例中,所述止动件93也可以为其他形状结构,例如,一字型插销结构。
[0083]
凸轮94上设有扳手941,可通过扳动扳手941带动凸轮94转动,以使得驱动组件停止工作。可以理解的是,根据实际情况,也可以设置凸轮94驱动电机驱动凸轮94转动,以实现对活动立柱架20的制动。
[0084]
制动装置90还包括第三检测器97,第三检测器97用于检测止动件93的一端是否插入销孔9101,第三检测器97与驱动组件的电机84连接,以控制电机84的启停。
[0085]
具体地,第三检测器97为行程开关,行程开关安装于导向底座92,行程开关的凸块朝向扳手941的一侧设置,当转动扳手941使得第二插销933脱离销孔9101时,扳手941与行程开关的凸块接触,当转动扳手941使得第二插销933插入销孔9101时,扳手941与行程开关的凸块分离。
[0086]
以上所述仅为本实用新型的实施方式,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips