
 商标分类
商标分类  商标转让
商标转让 
操纵室运动机构以及起重机的制作方法
 2021-02-19 07:02:35|
2021-02-19 07:02:35| 362|
362| 起点商标网
起点商标网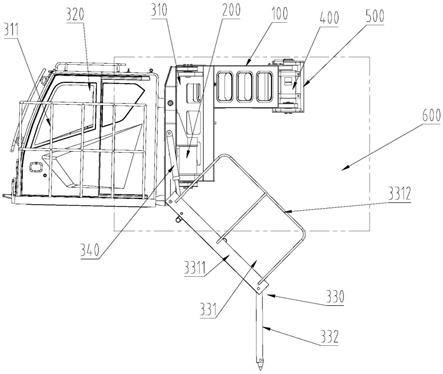
[0001]
本实用新型涉及起重机技术领域,具体地涉及一种操纵室运动机构以及起重机。
背景技术:
[0002]
起重机是指在一定范围内垂直提升和水平搬运重物的多动作起重机械。又称天车、航吊、吊车。起重机在市场上的发展和使用越来越广泛,为了控制起重机的工作,起重机设有操纵室以使操作人员在其中进行对起重机执行动作的操作。
[0003]
现有的超大吨位的起重机,其行驶宽度需在3米限值内,而由于吊臂宽度较宽,因此,操纵室就无法直接布置在侧方,目前,通常采用将操纵室设置在吊臂的后部(也即是转台的后部)的方式以解决起重机的宽度问题。但是,由于吊臂是起重机的主要工作部件,并且吊臂的长度是非常重要的指标,操纵室设置在吊臂后部无疑会占据一定的整车长度,从而导致在整车长度有限的前提下,操纵室会减少吊臂的长度。
技术实现要素:
[0004]
本实用新型的目的是为了克服现有技术存在的问题,提供一种操纵室运动机构以及起重机,该操纵室运动机构能够保证位于吊臂后部的操纵室不会影响吊臂的长度。
[0005]
为了实现上述目的,本实用新型一方面提供一种操纵室运动机构,用于安装至起重机的转台,所述操纵室运动机构包括摆臂、第一摆动油缸以及操纵室;所述摆臂的一端为能够铰接至所述转台的铰接端,另一端与所述操纵室铰接以使所述操纵室能够位于所述转台的后方;所述第一摆动油缸配置为能够驱动所述操纵室在水平方向上相对于所述摆臂的另一端转动。
[0006]
可选的,所述操纵室的横截面为长方形,所述第一摆动油缸配置为能够驱动所述操纵室在行车位置和工作位置之间转动,其中,在所述行车位置,所述操纵室的长度方向垂直于所述摆臂的长度方向,在所述工作位置,所述操纵室的长度方向平行于所述摆臂的长度方向。
[0007]
可选的,所述摆臂呈l形并包括相互垂直的第一段结构和第二段结构,所述第一段结构的一端用于连接至所述转台,所述第一段结构的另一端与所述第二段结构的一端连接,所述第二段结构的另一端与所述操纵室铰接;其中,在所述行车位置,所述操纵室的长度方向垂直于所述第一段结构的长度方向,在所述工作位置,所述操纵室的长度方向平行于所述第一段结构的长度方向。
[0008]
可选的,所述操纵室包括架体、操纵室本体、折叠梯以及伸缩驱动油缸;所述架体与所述第二段结构的另一端铰接并设有第一铰接点;所述操纵室本体设置在所述架体上;所述折叠梯的一端铰接在所述第一铰接点,另一端为自由端以能够在折叠状态和打开状态之间移动;所述伸缩驱动油缸配置为能够驱动所述折叠梯绕所述第一铰接点转动;其中,在所述折叠状态,所述自由端远离地面;在所述打开状态,所述自由端靠近地面。
[0009]
可选的,所述折叠梯包括主梯以及副梯;所述主梯的一端铰接至所述第一铰接点,
另一端能够绕所述第一铰接点转动并且设有第二铰接点;所述副梯的一端铰接至所述第二铰接点,另一端为所述自由端。
[0010]
可选的,所述主梯包括台阶部以及设置在所述台阶部上的第一护栏,所述台阶部的一端铰接至所述第一铰接点,另一端能够绕所述第一铰接点转动并且设有所述第二铰接点。
[0011]
可选的,所述架体包括设置在所述操纵室本体外侧的第二护栏,所述第二护栏与所述操纵室本体间隔设置。
[0012]
可选的,所述操纵室运动机构包括第二摆动油缸,所述第二摆动油缸配置为能够驱动所述摆臂在水平方向上转动以使所述操纵室能够绕所述铰接端转动。
[0013]
可选的,所述操纵室运动机构包括用于安装在所述转台上的固定座,所述第二摆动油缸设置于所述固定座,所述摆臂的铰接端铰接于所述固定座。
[0014]
本实用新型第二方面提供一种起重机,所述起重机包括转台以及上述的操纵室运动机构,所述操纵室运动机构的摆臂的铰接端铰接至所述转台。
[0015]
通过上述技术方案,所述摆臂为一体成型结构并且其一端为能够铰接至起重机的转台的铰接端,所述摆臂的另一端与所述操纵室铰接以使所述操纵室能够位于所述转台的后方。当起重机在行车时,所述操纵室位于所述转台的后方,即,所述操纵室位于起重机的吊臂的后方,这时控制所述第一摆动油缸驱动所述操纵室在水平方向上相对于所述摆臂转动,由于所述操纵室的横截面为长方形,因此当所述操纵室水平转动时,其与所述转台的长度总和会发生变化,这样只需将所述操纵室转动至其与所述转台的长度总和最短,即可在整车长度有限的情况下充分保证吊臂的长度。另外,由于所述摆臂为一体成型结构,因此其具有较好的机械强度,能够向所述操纵室提供更加稳定的支撑。
附图说明
[0016]
图1是本实用新型的操纵室运动机构的一种实施方式的结构示意图;
[0017]
图2是本实用新型的操纵室运动机构的操纵室处于行车位置时的俯视图;
[0018]
图3是本实用新型的操纵室运动机构的操纵室处于行车位置与工作位置之间的俯视图;
[0019]
图4是本实用新型的操纵室运动机构的操纵室处于工作位置时的俯视图。
[0020]
附图标记说明
[0021]
100-摆臂,110-第一段结构,120-第二段结构,200-第一摆动油缸,310-架体,311-第二护栏,320-操纵室本体,330-折叠梯,331-主梯,332-副梯,340-伸缩驱动油缸,3311-台阶部,3312-第一护栏,400-第二摆动油缸,500-固定座,600-转台
具体实施方式
[0022]
以下结合附图对本实用新型的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本实用新型,并不用于限制本实用新型。
[0023]
如图1至图4所示,本实用新型的操纵室运动机构,用于安装至起重机的转台600。操纵室运动机构包括摆臂100、第一摆动油缸200以及操纵室;操纵室的横截面为长方形,摆臂100为一体成型结构,摆臂100的一端为能够铰接至转台600的铰接端,另一端与操纵室铰
接以使操纵室能够位于转台600的后方;第一摆动油缸200配置为能够驱动操纵室在水平方向上相对于摆臂100的另一端转动。
[0024]
在本实用新型中,当起重机在行车时,操纵室位于转台600的后方,即,操纵室位于起重机的吊臂的后方,这时控制第一摆动油缸200驱动操纵室在水平方向上相对于摆臂100转动,由于操纵室的横截面为长方形,因此当操纵室水平转动时,其与转台600的长度总和会发生变化,这样只需将操纵室转动至其与转台600的长度总和最短,即可在整车长度有限的情况下充分保证吊臂的长度。另外,由于摆臂100为一体成型结构,因此其具有较好的机械强度,能够向操纵室提供更加稳定的支撑。
[0025]
具体的,第一摆动油缸200配置为能够驱动操纵室在行车位置和工作位置之间转动,其中,在行车位置,操纵室的长度方向垂直于摆臂100的长度方向,在工作位置,操纵室的长度方向平行于摆臂100的长度方向。也就是说,当操纵室的长度方向垂直于摆臂100的长度方向时,可以视作操纵室与摆臂100形成了l型结构,这时若控制摆臂100靠近转台600并平行于转台600的长度方向,即可将操纵室与转台600的总体长度控制在最短。
[0026]
应当理解的是,操纵室还能够由第一摆动油缸200控制在行车位置和工作位置之间,也就是说,操纵室的长度方向能够与摆臂100的长度方向之间形成一定的角度,从而方便调整操纵室的视野。
[0027]
摆臂100可以设计为多种形式,例如,在本实用新型的一种实施方式中,摆臂100呈l形,其包括相互垂直的第一段结构110和第二段结构120,第一段结构110的一端用于连接至转台600,第一段结构110的另一端与第二段结构120的一端连接,第二段结构120的另一端与操纵室铰接;其中,在行车位置,操纵室的长度方向垂直于第一段结构110的长度方向,在工作位置,操纵室的长度方向平行于第一段结构110的长度方向。这样设置的好处是,当摆臂100的第一段结构110平行于转台600时,第二段结构120刚好位于转台600的后部,从而保证操纵室位于转台600的后部而不会从转台600的侧面露出而对行车宽度造成影响。
[0028]
当起重机行车时,其宽度需要控制在一定范围内,例如控制在3米内,而当起重机停车进行作业时,其操纵室需要具有良好的视野,因此,在本实用新型的一种实施方式中,操纵室运动机构还包括第二摆动油缸400,第二摆动油缸400配置为能够驱动摆臂100在水平方向上转动以使操纵室能够绕铰接端转动。也就是说,当起重机停车进行作业时,第二摆动油缸400控制摆臂100转动至与转台600呈一定夹角,例如直角,这就使得操纵室完全位于转台600(即起重机)的外侧,操纵室即可获得良好的视野。
[0029]
为了便于摆臂100与转台600之间的铰接连接,可选的,操纵室运动机构包括用于安装在转台600上的固定座500,第二摆动油缸400设置于固定座500,摆臂100的铰接端铰接于固定座500。也就是说,摆臂100是通过固定座500铰接在转台600上的,提高了铰接的稳定性。
[0030]
应当理解的是,操纵室可以设计为多种形式,在本实用新型的一种实施方式中,操纵室包括架体310、操纵室本体320、折叠梯330以及伸缩驱动油缸340;伸缩驱动油缸340包括缸体和活塞杆,活塞杆可以相对于缸体做活塞运动,活塞杆的运动轨迹为沿着自身轴线方向的直线运动;架体310与第二段结构120的另一端铰接并设有第一铰接点;操纵室本体320设置在架体310上;折叠梯330的一端铰接在第一铰接点,另一端为自由端以能够在折叠状态和打开状态之间移动;伸缩驱动油缸340配置为能够驱动折叠梯330绕第一铰接点转
动;其中,在折叠状态,自由端远离地面;在打开状态,自由端靠近地面。
[0031]
当操作人员无需进出操纵室本体320时,折叠梯330处于折叠状态,在折叠状态,折叠梯330的自由端远离地面,从而不会影响起重机的行驶;而当操作人员需要进出操纵室本体320时,起重机停止行驶,折叠梯330切换为打开状态,在打开状态,自由端足够地靠近地面甚至与地面接触,从而方便操作人员从地面攀爬进入操纵室本体320或者从操纵室本体320下行至地面。因此,本实用新型的操纵室能够方便操作人员的进出,保证操作人员的人身安全。
[0032]
应当理解的是,折叠梯330可以设计为多种形式,只要其能够在折叠状态和打开状态之间进行切换即可。在本实用新型的一种实施方式中,折叠梯330包括主梯331以及副梯332;主梯331的一端铰接至第一铰接点,另一端能够绕第一铰接点转动并且设有第二铰接点;副梯332的一端铰接至第二铰接点,另一端为自由端。这样设置的好处是,在折叠状态下,折叠梯330可以保持较短的高度,从而便于起重机的行驶,而在打开状态下,折叠梯330可以具有主梯331和副梯332的长度之和,能够使副梯332的自由端更加容易地接触到地面,方便操作人员的攀爬,也大大提高了攀爬的安全性。
[0033]
为了进一步保证操作人员在攀爬折叠梯330时的人身安全,可选的,主梯331进一步包括台阶部3311以及设置在台阶部3311上的第一护栏3312,台阶部3311的一端铰接至第一铰接点,另一端能够绕第一铰接点转动并且设有第二铰接点。通过设置第一护栏3312可以防止操作人员从主梯331上跌落,提高了安全性。
[0034]
另外,当操作人员处于操纵室本体320的水平高度时,为了防止操作人员在进出操纵室本体320时发生跌落等意外,可选的,架体310还包括设置在操纵室本体320外侧的第二护栏311,第二护栏311与操纵室本体320间隔设置从而允许操作人员在第二护栏311与操纵室本体320之间行走。
[0035]
本实用新型还提供了一种起重机,起重机包括转台600以及上述的操纵室运动机构,操纵室运动机构的摆臂100的铰接端铰接至转台600。本实用新型的起重机由于采用了上述的操纵室运动机构,因此其与上述操纵室运动机构相对于现有技术的优势相同,在此不再赘述。
[0036]
以上结合附图详细描述了本实用新型的优选实施方式,但是,本实用新型并不限于此。在本实用新型的技术构思范围内,可以对本实用新型的技术方案进行多种简单变型,为了避免不必要的重复,本实用新型对各种可能的组合方式不再另行说明。但这些简单变型和组合同样应当视为本实用新型所公开的内容,均属于本实用新型的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips