
 商标分类
商标分类  商标转让
商标转让 
磁吸式工件抓取精准定位装置的制作方法
 2021-02-18 22:02:36|
2021-02-18 22:02:36| 267|
267| 起点商标网
起点商标网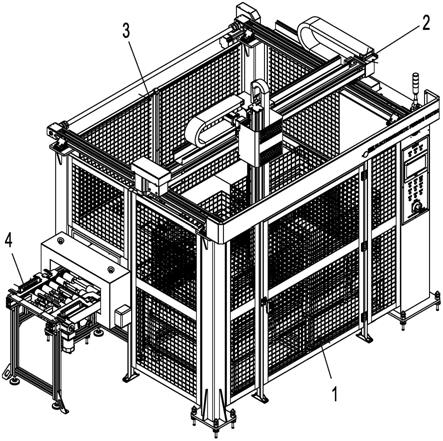
[0001]
本实用新型涉及自动化设备领域,特别是一种磁吸式工件抓取精准定位装置。
背景技术:
[0002]
随着智能化加工设备的快速发展,工件的加工逐渐由人工转为机械操作。而机械手在智能化加工设备中运用广泛,不仅可以抓取工件以配合加工机构完成加工操作,还可以将加工完的工件转移至下一工序。
[0003]
然而目前机械手在抓取工件时,由于自动化程度的限制,无法抓取任意摆放或堆放的工件,需要人工将工件放置在特定区域并精确定位好,才能被机械手正确抓取。
技术实现要素:
[0004]
本实用新型的目的在于提供一种运用于圆盘形工件自动上料的磁吸式工件抓取精准定位装置,其可转移任意堆放的工件,并实现精确定位。
[0005]
本实用新型的目的通过如下技术方案实现:一种磁吸式工件抓取精准定位装置,它包括进件机构、移件机构、矫正机构以及精定位机构;所述进件机构包括用于堆放工件的进件框;所述移件机构包括电磁吸取组件以及用于驱动电磁吸取组件在进件框和矫正机构之间往复位移的移载组件;所述矫正机构包括用于初步矫正工件的接件盒、判断接件盒内工作朝向的检测组以及根据检测组信号对工件进行朝向矫正的翻转组件;所述精定位机构设于翻转组件的出口侧。
[0006]
较之现有技术而言,本实用新型的优点在于:
[0007]
1.本实用新型包括进件机构、移件机构、矫正机构以及精定位机构,移件机构可吸取进件机构上任意堆放的工件,并通过矫正机构进行正反朝向的矫正,最终通过精定位机构进行精确定位,以便于后续的加工操作或机械臂精确抓取,从而实现自动化上料。
[0008]
2.电磁吸取组件包括升降滑臂、悬架以及滑动连接在悬架上的电磁铁;悬架上设有荷重感应器和高度感应器,通过高度感应器可判断下降过程中的电磁铁是否接触到工件并进行提升,通过荷重感应器可确定电磁铁是否吸附工件,以实现工件的自动化转移。
[0009]
3.矫正机构包括由前至后依次设置的翻转组件、接件盒以及推送组件;接件盒侧壁通过设置若干对射检a来判断接件盒内工件的正反朝向,推送组件根据朝向信息将接件盒内工件推送至翻转组件或精定位机构,以实现工件的智能检测以及矫正操作。
[0010]
4.接件盒的侧壁斜向设置,且其由上往下逐步向中部收容,斗状的接件盒可对进入的工件进行导向,使其向接件盒底面滑动的过程中进行摆正,形成正反置放状态,以避免斜向的情况。
[0011]
5.精定位机构包括辊式输送线、定位挡架以及顶升组件,定位挡架的后侧设有两左右间隔分布的定位矫正块,定位矫正块与工件的接触区设有倒角结构,且两定位矫正块的中线经过工件的圆心,工件通过输送辊的输送可不断在定位矫正块进行微调,最终通过顶升组件进行承托,以便于机械臂抓取。
[0012]
6.辊式输送线的中段设有拦料组件,拦料组件包括用于检测工件通过的对射检b以及设于辊式输送线下侧且由动力件驱动上下升降的拦料部,当对射检b感应到有工件通过时,控制拦料部上升,拦住后续的工件,防止进入定位挡架的工件滞留区,干扰前侧工件的精定位;并且拦料部也可对拦截的工件进行预定位。
附图说明
[0013]
图1是本实用新型一种磁吸式工件抓取精准定位装置的立体结构示意图。
[0014]
图2是图1的俯视图。
[0015]
图3是矫正机构和精定位机构连接关系的立体结构示意图。
[0016]
图4是图3的侧视图。
[0017]
图5是图3的俯视图。
[0018]
图6是接件盒和推送组件的配合原理示意图。
[0019]
图7是翻转组件的工作原理图。
[0020]
图8是电磁吸取组件的立体结构示意图。
[0021]
图9是电磁吸取组件的局部放大示意图。
[0022]
标号说明:1进件机构、11进件框、2移件机构、21电磁吸取组件、211升降滑臂、212悬架、213荷重固定板、214荷重感应器、215电磁铁、216滑动吊杆、217压片、218高度感应器、219限位链条、22移载组件、3矫正机构、31接件盒、311放置口、312输送口、32检测组、321对射检a、33翻转组件、331翻转架、332旋转气缸、333翻转定位件、34推送组件、341推块、342伺服电缸、4精定位机构、41辊式输送线、42定位挡架、421定位矫正块、43顶升组件、44拦料组件、441对射检b、442拦料部、5消磁机、6工件。
具体实施方式
[0023]
下面结合说明书附图和实施例对本
技术实现要素:
进行详细说明:
[0024]
如图1至图9所示为本实用新型提供的一种磁吸式工件抓取精准定位装置的实施例示意图。
[0025]
一种磁吸式工件抓取精准定位装置,它包括进件机构1、移件机构2、矫正机构3以及精定位机构4。
[0026]
本实用新型适用于抓取圆盘形工件,如刹车盘。
[0027]
所述进件机构1包括用于堆放工件的进件框11。进件框11可设置两个,用于交替供件,以保证装置的持续运行。
[0028]
所述移件机构2包括电磁吸取组件21以及用于驱动电磁吸取组件21在进件框11和矫正机构3之间往复位移的移载组件22;
[0029]
所述移载组件22包括沿左右方向移动的x轴移载以及设置在x轴移载上且沿前后方向移动的y轴移载;x轴移载和y轴移载构成覆盖于进件框11以及矫正机构3上方的移载区。
[0030]
所述矫正机构3包括用于初步矫正工件的接件盒31、判断接件盒31内工作朝向的检测组32以及根据检测组32信号对工件进行朝向矫正的翻转组件33;所述精定位机构4设于翻转组件33的出口侧。
[0031]
所述接件盒31的上侧设有放置口311,且接件盒31的前后侧壁分别开设有输送口312;
[0032]
所述翻转组件33正对接件盒31的前侧输送口312,接件盒31的后侧还设有用于将接件盒31内工件推送至翻转组件33或精定位机构4的推送组件34。
[0033]
所述检测组32包括若干分布在接件盒31左右侧壁上的对射检a321,检测组32通过不同位置的对射检a321信号判断工件朝向。
[0034]
本实施例中,对射检a321共设置三组,各对射检a321处于同一水平高度且前后间隔分布。
[0035]
以刹车盘为例,当刹车盘正置时,三组对射检a321同时感应到刹车盘底部的盘体;当刹车盘倒置时,三组对射检a321仅中间的对射检a321感应到朝下的刹车安装轴。信号收集端根据三组对射检a321反馈的信号自动判断刹车盘的朝向。
[0036]
所述接件盒31的侧壁斜向设置,且其由上往下逐步向中部收容。
[0037]
斗状的接件盒31可对进入的刹车盘进行导向,使其向接件盒31底面滑动的过程中进行摆正,形成正反置放状态,以避免斜向的情况。
[0038]
所述推送组件34包括推块341以及用于驱动推块341前后位移的伺服电缸342;所述推块341的前侧面设有“v”形的导向槽。
[0039]
伺服电缸342有三种行程:将工件由接件盒31推入翻转组件33;翻转操作完成后,将工件由翻转组件33推入精定位机构4;将工件由接件盒31推入精定位机构4。
[0040]
由电磁吸取组件21落入接件盒31内的工件,其在接件盒31底部的位置存在偏差,“v”形的导向槽在推送过程中可起到初步调节工件位置的作用。
[0041]
所述翻转组件33包括前后贯通的翻转架331,所述翻转架331的左右侧转动连接在机架上,且通过旋转气缸332驱动进行翻转;所述翻转架331的上侧面设有用于将工件压紧固定在翻转架331底面的翻转定位件333。
[0042]
所述翻转定位件333包括压板以及驱动压板上下伸缩的压紧气缸。
[0043]
所述精定位机构4包括设于翻转组件33前侧的辊式输送线41,辊式输送线41的末端设有定位挡架42,定位挡架42的后侧设有两左右间隔分布的定位矫正块421,定位矫正块421与工件的接触区设有倒角结构,且两定位矫正块421的中线经过工件的圆心。
[0044]
所述辊式输送线41的下侧设有顶升组件43,所述顶升组件43位于定位矫正块421所形成的工件滞留区下侧。
[0045]
辊式输送线41上还设有用于监测工件滞留区的光栅,当光栅感应到工件时,控制顶升组件43上升。
[0046]
所述顶升组件43包括顶升板以及驱动顶升板上下位移的升降气缸。
[0047]
所述辊式输送线41的中段设有拦料组件44,拦料组件44包括用于检测工件通过的对射检b441以及设于辊式输送线41下侧且由动力件驱动上下升降的拦料部442,所述拦料部442包括两左右间隔分布的挡杆。
[0048]
当对射检b441感应到有工件通过时,控制拦料部442上升,拦住后续的工件,并且拦料部442也可对拦截的工件进行预定位。
[0049]
所述辊式输送线41上还设有消磁机5。消磁机5用于消除工件上由电磁铁吸附所产生的磁性。
[0050]
所述电磁吸取组件21包括升降滑臂211、固定在升降滑臂211下端的悬架212以及滑动连接在悬架212上的电磁铁215;
[0051]
所述悬架212的底部设有荷重固定板213,荷重固定板213的上侧面设有荷重感应器214,荷重感应器214和升降滑臂211下端之间留有压力测试间距;
[0052]
所述电磁铁215上端固设有滑动吊杆216,所述滑动吊杆216竖向穿过荷重固定板213,且滑动连接在荷重固定板213上;滑动吊杆216的上端设有在压力测试间距位移且与荷重感应器214限位配合的压片217;所述悬架212上还设有用于监测压片217位置的高度感应器218。
[0053]
所述升降滑臂211设于y轴移载上,其通过z轴移载驱动沿上下方向移动。
[0054]
所述悬架212的两对应侧分别设有限位链条219;所述限位链条219的上端固定在悬架212,下端固定在电磁铁215上。
[0055]
所述电磁铁215的下端设有不锈钢封头。
[0056]
本实用新型的工作原理如下:
[0057]
1.操作人员将装满工件的进件框11推送至进件工位,检知感应到进件框11到位后,移载组件22驱动电磁吸取组件21移动至进件框11的上方。
[0058]
2.升降滑臂带动电磁铁215下降,当电磁铁215接触进件框11内的工件时停止;而升降滑臂持续下移,此时电磁铁215上侧的滑动吊杆216相对悬架212向上侧顶升,当滑动吊杆216上的压片217升至高度感应器218位置时,升降滑臂驱动电磁铁215上升,滑动吊杆216上的压片217相对悬架212向下侧滑动,并压紧在荷重感应器214上,荷重感应器214产生压力值,表明电磁铁215吸附到工件。
[0059]
3.移载组件22驱动电磁吸取组件21移动至接件盒31上方,电磁铁215断电,工件落入接件盒31内,通过接件盒31侧壁的导向,对滑落的工件进行摆正,形成正反置放状态。
[0060]
4.检测组32判断工件的正反朝向,当工件为正向置放时,伺服电缸342直接将工件由接件盒31推入精定位机构4;当工件为反向置放时,伺服电缸342将工件由接件盒31推入翻转组件33,翻转组件33上的压板下降将工件压紧固定在翻转架331上,旋转气缸332驱动翻转架331进行180
°
翻转,接着压板下降,工件完成朝向转换;最后伺服电缸342将工件由翻转组件33推入精定位机构4。
[0061]
5.工件进入精定位机构4后,由辊式输送线41向前输送,工件先经过消磁机5进行消磁操作,再经过对射检b441,对射检b441感应到工件时控制拦料部442上升,拦住后续的工件;前侧的工件继续移动至定位挡架42上,定位挡架42后侧的定位矫正块421可对工件进行最后的精确定位,当光栅感应到工件时,控制顶升组件43上升,使得工件脱离辊式输送线41,下一工序的机械臂可直接抓取精确放置的工件。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签:

 热门咨询
热门咨询




tips