
 商标分类
商标分类  商标转让
商标转让 
一种机器人用电梯控制装置的制作方法
 2021-02-18 21:02:45|
2021-02-18 21:02:45| 454|
454| 起点商标网
起点商标网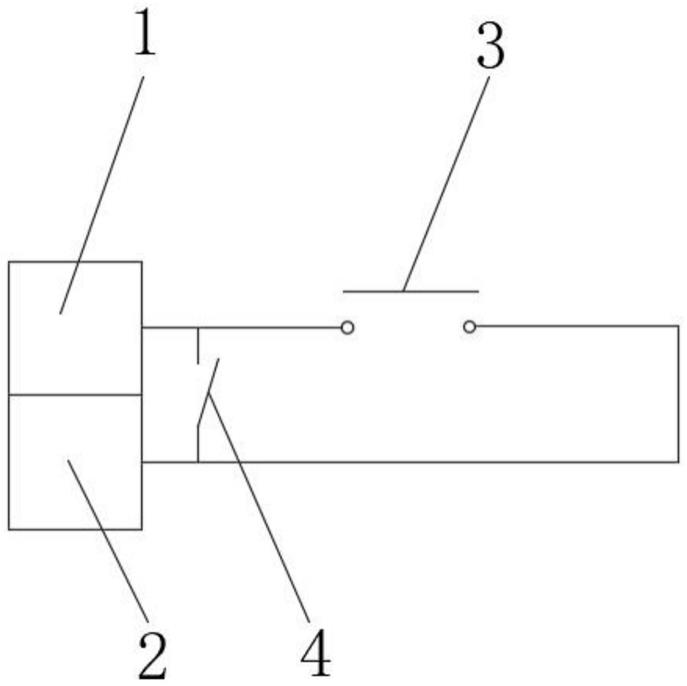
[0001]
本实用新型涉及机器人领域,特别涉及一种机器人用电梯控制装置。
背景技术:
[0002]
随着无人驾驶技术的飞速发展,机器人在生活中扮演着越来越重要的角色,尤其是服务机器人领域,然而,一般情况下机器人很难独自完成跨楼层作业,机器人如果想完全替代人完成任务,就必须能够自主跨越楼层,这就要求机器人能够与电梯实现联动,为此,我们提出一种机器人用电梯控制装置。
技术实现要素:
[0003]
本实用新型的主要目的在于提供一种机器人用电梯控制装置,可以有效解决背景技术中的问题。
[0004]
为实现上述目的,本实用新型采取的技术方案为:
[0005]
一种机器人用电梯控制装置,包括电梯控制装置和电梯板,电梯板包括安装电梯内部的电梯内呼选层板以及安装在楼层上的电梯外呼选项板,所述电梯内呼选层板和电梯外呼选项板的外部均安装有多组电梯按键,且电梯按键的两端分别连接有第一触点和第二触点,其特征在于:该电梯控制装置包括并联在第一触点和第二触点之间的继电器,其中,
[0006]
所述电梯控制装置还包括相互串联安装在电梯板内部的光敏电阻和分压电阻、单片机模块以及用于向外传输信号的无线通讯模块,且光敏电阻和分压电阻之间的导线上连接有与单片机模块连接的检测点,所述光敏电阻安装在电梯按键的内部。
[0007]
优选的,所述光敏电阻和分压电阻连接在电源vcc和地gnd之间。
[0008]
优选的,所述电梯按键的内部安装有用显示电梯按键状态的led指示灯。
[0009]
优选的,一种机器人用电梯控制装置的使用方法,包括以下步骤:
[0010]
步骤一:机器人向所在楼层电梯外呼选项板内部无线通讯模块发出外呼应指令;
[0011]
步骤二:待电梯外呼选项板内部无线通讯模块接收到外呼应指令后,通过单片机模块控制与其连接的继电器通电闭合;
[0012]
步骤三:经步骤二继电器闭合后,电梯内呼选层板外部单片机模块,同时检测检测点电平是否发生变化,并根据检测结果向机器人实时反馈电梯是否到达;
[0013]
步骤四:待电梯停靠机器人所在楼层后,机器人持续向电梯内呼选层板内部安装的无线通讯模块发出电梯门常开指令,内呼板内部单片机模块一直执行指令,机器人进入轿厢,向内呼板发送目的楼层同时停止发送电梯门常开指令;
[0014]
步骤五:电梯内呼选层板无线通讯模块接受相应的指令后,通过单片机模块控制与指定楼层电梯按键连接的继电器通电闭合,指定楼层被选通;
[0015]
步骤六:经步骤五继电器闭合后,电梯内呼选层板内部单片机模块,同时检测检测点电平是否发生变化,并根据检测结果向机器人实时反馈电梯是否到达目的楼层;
[0016]
步骤七:待电梯到达目的楼层后,机器人持续向电梯内呼选层板内部安装的无线
通讯模块发出电梯门常开指令,内呼板内部单片机模块一直执行指令,待机器人移出轿厢,停止发送电梯门常开指令。
[0017]
优选的,步骤三中,所述电梯外呼选项板检测点的检测结果包括以下两种情况:
[0018]ⅰ检测点电平发生变化时,向机器人发出外呼应操作完成指令;
[0019]ⅱ检测点电平无明显变化时,向机器人发出电梯外呼选项板故障指令。
[0020]
优选的,步骤四中,所述电梯停靠在机器人所在楼层后,机器人向电梯外呼选项板内部单片机模块发出外呼应指令,控制与单片机模块连接的继电器间断性触发,待机器人进入轿厢后停止。
[0021]
优选的,步骤六中,所述电梯内呼选层板的检测点检测结果包括以下两种情况:
[0022]
①
检测点电平发生变化时,向机器人发出内呼应操作完成指令;
[0023]
②
检测点电平无明显变化时,向机器人发出电梯内呼选层板故障指令。
[0024]
优选的,步骤七中,所述电梯停靠在内呼应指令相应的楼层后,机器人向电梯内呼选层板内部单片机模块发出外呼应指令,控制与单片机模块连接的继电器间断性触发,待机器人移出轿厢后停止。
[0025]
与现有技术相比,本实用新型具有如下有益效果:
[0026]
一是本实用新型通过在电梯上安装继电器、单片机模块和光敏电阻,便能将电梯与机器人进行联动,同时由于本实用新型结构简单,且操作简单,方便大规模进行推广;
[0027]
二是通过在梯内呼选层板和电梯外呼选项板的内部均安装光敏电阻,能够检测电梯是否执行相应的操作,提高电梯控制信息的准确性,同时还方便对电梯进行修理;
[0028]
三是通过在机器人进出电梯轿厢时,间断触发继电器,使得电梯门保持打开状态,从而提高机器人进出电梯轿厢的安全性。
附图说明
[0029]
图1为本实用新型中电梯按键触发电路图;
[0030]
图2为本实用新型中触发信号检测电路图;
[0031]
图3为本实用新型中触发信号检测电路图的另一示例。
[0032]
图中:1、第一触点;2、第二触点;3、电梯按键;4、继电器;5、光敏电阻;6、分压电阻;7、检测点。
具体实施方式
[0033]
为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
[0034]
参照图1所示,一种机器人用电梯控制装置,包括电梯控制装置和电梯板,电梯板包括安装电梯内部的电梯内呼选层板以及安装在楼层上的电梯外呼选项板,电梯内呼选层板和电梯外呼选项板的外部均安装有多组电梯按键3,且电梯按键3的两端分别连接有第一触点1和第二触点2,其特征在于:该电梯控制装置包括并联在第一触点1和第二触点2之间的继电器4,其中,
[0035]
电梯控制装置还包括相互串联安装在电梯板内部的光敏电阻5和分压电阻6、单片机模块以及用于向外传输信号的无线通讯模块,且光敏电阻5和分压电阻6之间的导线上连
接有与单片机模块连接的检测点7,光敏电阻5安装在电梯按键3的内部。
[0036]
参照图2和图3所示,光敏电阻5和分压电阻6连接在电源vcc和地gnd之间。
[0037]
参照图1所示,电梯按键3的内部安装有用显示电梯按键3状态的led指示灯。
[0038]
一种机器人用电梯控制装置的使用方法,包括以下步骤:
[0039]
步骤一:机器人向所在楼层电梯外呼选项板内部无线通讯模块发出外呼应指令;
[0040]
步骤二:待电梯外呼选项板内部无线通讯模块接收到外呼应指令后,通过单片机模块控制与其连接的继电器4通电闭合;
[0041]
步骤三:经步骤二继电器4闭合后,电梯内呼选层板外部单片机模块,同时检测检测点7电平是否发生变化,并根据检测结果向机器人实时反馈电梯是否到达,电梯外呼选项板检测点7的检测结果包括以下两种情况:
[0042]ⅰ检测点7电平发生变化时,向机器人发出外呼应操作完成指令;
[0043]ⅱ检测点7电平无明显变化时,向机器人发出电梯外呼选项板故障指令;
[0044]
步骤四:待电梯停靠机器人所在楼层后,机器人持续向电梯内呼选层板内部安装的无线通讯模块发出电梯门常开指令,内呼板内部单片机模块一直执行指令,机器人进入轿厢,向内呼板发送目的楼层同时停止发送电梯门常开指令,电梯停靠在机器人所在楼层后,机器人向电梯外呼选项板内部单片机模块发出外呼应指令,控制与单片机模块连接的继电器4间断性触发,待机器人进入轿厢后停止;
[0045]
步骤五:电梯内呼选层板无线通讯模块接受相应的指令后,通过单片机模块控制与指定楼层电梯按键3连接的继电器4通电闭合,指定楼层被选通;
[0046]
步骤六:经步骤五继电器4闭合后,电梯内呼选层板内部单片机模块,同时检测检测点7电平是否发生变化,并根据检测结果向机器人实时反馈电梯是否到达目的楼层,电梯内呼选层板的检测点7检测结果包括以下两种情况:
[0047]
①
检测点7电平发生变化时,向机器人发出内呼应操作完成指令;
[0048]
②
检测点7电平无明显变化时,向机器人发出电梯内呼选层板故障指令;
[0049]
步骤七:待电梯到达目的楼层后,机器人持续向电梯内呼选层板内部安装的无线通讯模块发出电梯门常开指令,内呼板内部单片机模块一直执行指令,待机器人移出轿厢,停止发送电梯门常开指令,电梯停靠在内呼应指令相应的楼层后,机器人向电梯内呼选层板内部单片机模块发出外呼应指令,控制与单片机模块连接的继电器4间断性触发,待机器人移出轿厢后停止。
[0050]
使用时,机器人向与机器人所在楼层位置的电梯外呼选项板发送外呼应指令,该楼层的电梯外呼选项板接收到外呼应指令后,电梯外呼选项板内部的单片机模块接收外呼应指令后,根据指令判断机器人向上面楼层移动(还是要向下面楼层移动),从而控制与向上(或向下)的电梯电梯按键3并联的继电器4通电闭合,从而向电梯发送请求,同时相应电梯按键3内部的led指示灯发光。
[0051]
当光敏电阻5与分压电阻6如图2所示安装时,由于光敏电阻5安装在电梯按键3的内部,因此在led指示灯发光时,光敏电阻5接收光线,其阻值发现下降,使得光敏电阻5分得电压减小,分压电阻6分得的电压变大,则检测点7的电平从低电平转化为高电平。
[0052]
同理,当光敏电阻5与分压电阻6如图2所示安装时,光敏电阻5接收光线,其阻值发现下降,使得光敏电阻5分得电压减小,分压电阻6分得的电压变大,则检测点7的电平从高
电平转化为低电平,所有通过单片机模块检测检测点7位置的电平变化,从而能够检测出电梯外呼选项板是否被触发。
[0053]
待电梯轿厢移动到机器人所在楼层时,机器人间断性的向电梯外呼选项板发送外呼应指令,使得电梯的电梯门处于常开状态,待机器人进入后,停止向电梯外呼选项板发送外呼应指令。
[0054]
同理,机器人进入电梯内部后,向电梯内呼选层板发送内呼应指令,电梯内呼选层板内部的单片机模块判断机器人所要到达的楼层,控制与相应楼层电梯按键3并联的继电器4通电闭合,再由该电梯按键3内部的光敏电阻5检测是否已经被触发,在机器人从电梯向外移动的过程中,机器人间断性的向电梯内呼选层板发送内呼应指令,使得电梯的电梯门处于常开状态,待机器人出去后,停止向电梯内呼选层板发送内呼应指令,完成机器人的楼层移动。
[0055]
以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips