
 商标分类
商标分类  商标转让
商标转让 
一种柔性封装装置的制作方法
 2021-02-18 08:02:50|
2021-02-18 08:02:50| 338|
338| 起点商标网
起点商标网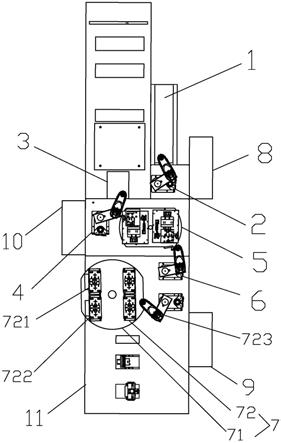
[0001]
本实用新型涉及锂电池设备制造技术领域,具体涉及一种柔性封装装置。
背景技术:
[0002]
现有的封装机大多数采用8工位转盘结构,设备的性能对零件的加工精度和装配精度及调试都有很高的要求。在换型时,需要更换所有定位夹具及顶侧封封头,存在更换数量多,调试困难,花费时间长等问题,严重影响产能。
技术实现要素:
[0003]
为了解决现有封装机换型时更换夹具数量多,调试困难,花费时间长的问题,本实用新型提供一种柔性封装装置。
[0004]
一种柔性封装装置,包括电芯来料机构、转移机器人ⅰ、膜壳来料机构、转移机器人ⅱ、双夹具转盘机构、转移机器人ⅲ和双封装转盘机构,所述转移机器人ⅰ设置在电芯来料机构和双夹具转盘机构之间,所述转移机器人ⅱ设置在膜壳来料机构和双夹具转盘机构之间,所述转移机器人ⅲ设置在双夹具转盘机构和双封装转盘机构之间。
[0005]
进一步的,所述双夹具转盘机构包括转盘ⅰ和两个入壳合膜机构,所述入壳合膜机构呈中心对称安装在转盘ⅰ上,所述转移机器人ⅰ的机械臂往复摆动于电芯来料机构和任一个入壳合膜机构之间,所述转盘ⅰ的底部设置有转盘驱动机构ⅰ,所述转盘驱动机构ⅰ驱动转盘ⅰ旋转,所述转盘驱动机构ⅰ安装在机架上。
[0006]
进一步的,所述入壳合膜机构包括底板、上模板、下模板和上模板驱动机构,所述底板固定在转盘ⅰ上,所述下模板固定在底板上,所述上模板与下模板通过转轴连接,所述上模板驱动机构驱动上模板绕转轴转动。
[0007]
进一步的,所述入壳合膜机构还包括压板和压板驱动机构,所述压板驱动机构安装在底板上并位于远离转轴的一侧,所述压板安装在压板驱动机构上,所述压板驱动机构驱动压板移动至下模板的上方并下压。
[0008]
进一步的,所述上模板驱动机构包括驱动气缸、齿条、齿轮和齿轮座,所述驱动气缸水平设置在底板上,所述齿条与驱动气缸的气缸杆固定连接,所述齿轮与齿条啮合,所述齿轮转动安装在齿轮座上,所述齿轮座固定在底板上,所述转轴的端部与齿轮固定连接,所述转轴与下模板转动连接,所述转轴与上模板固定连接。
[0009]
进一步的,所述压板驱动机构包括直线驱动模组、压板气缸和气缸固定座,所述直线驱动模组固定在底板上,所述气缸固定座传动连接在直线驱动模组的驱动轴上,所述压板气缸竖直设置在气缸固定座上,所述压板与压板气缸的气缸杆固定连接。
[0010]
进一步的,所述双封装转盘机构包括转盘ⅱ和两个封边机构,所述两个封边机构呈中心对称安装在转盘ⅱ上,所述转盘ⅱ的底部设置有转盘驱动机构ⅱ,所述转盘驱动机构ⅱ驱动转盘ⅱ旋转,所述转盘驱动机构ⅱ安装在机架上。
[0011]
进一步的,所述封边机构包括顶封边机构和侧封边机构,所述顶封边机构和侧封
边机构并列设置,所述顶封边机构和侧封边机构之间设置有转移机器人ⅳ,所述转移机器人ⅳ的机械臂往复摆动于顶封边机构与侧封边机构。
[0012]
进一步的,所述柔性封装装置还包括电芯缓存机构,所述电芯缓存机构设置在电芯来料机构的旁侧,所述转移机器人ⅰ往复于电芯来料机构与双夹具转盘机构之间或电芯来料机构与电芯缓存机构之间或电芯缓存机构与双夹具转盘机构之间。
[0013]
进一步的,所述柔性封装装置还包括封印检测机构和转移机器人
ⅴ
,所述封印检测机构设置在双封装转盘机构的旁侧,所述转移机器人
ⅴ
的机械臂往复摆动于双封装转盘机构与封印检测机构之间。
[0014]
本实用新型的有益效果在于:
[0015]
1、转盘ⅰ上的入壳合膜机构数量减小到2个,极大缩短换型时间,减小换型调试难度;
[0016]
2、膜壳被搬运至任一个入壳合膜机构、电芯被搬运至膜壳内部,均采用机器人和ccd拍照定位的方式,精度更高,调试更方便;
[0017]
3、采用两套封边机构,一套在线生产,一套线外换型;
[0018]
4、来料电芯可一键缓存,一键取用;
[0019]
5、来料膜壳、封印后的电芯可一键检测,无所停机;
[0020]
6、整体结构简单,易维护调试。
附图说明
[0021]
图1为柔性封装装置整体结构俯视图;
[0022]
图2为双夹具转盘机构结构示意图;
[0023]
图3为双夹具转盘机构工作示意图;
[0024]
图中:1、电芯来料机构,2、转移机器人ⅰ,3、膜壳来料机构,4、转移机器人ⅱ,5、双夹具转盘机构,6、转移机器人ⅲ,7、双封装转盘机构,8、电芯缓存机构,9、封印检测机构,10、膜壳检测机构,11、机架,51、转盘ⅰ,52、入壳合膜机构,71、转盘ⅱ,72、封边机构,521、底板,522、上模板,523、下模板,524、上模板驱动机构,525、压板,526、压板驱动机构,721、顶封边机构,722、侧封边机构,723、转移机器人ⅳ,5241、驱动气缸,5242、齿条,5243、齿轮,5244、齿轮座,5261、压板气缸,5262、气缸固定座,5263、驱动轴。
具体实施方式
[0025]
下面结合附图1-3和具体实施方式对本实用新型的技术方案作进一步的说明,但并不局限于此,凡是对本实用新型技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围,均应涵盖在本实用新型的保护范围中。在本实用新型的描述中,需要理解的是:术语“前”“后”“左”“右”等指示方位的词语只是为了便于描述本实用新型,而不是指示或暗示所指的元件必须具有特定的方位,因此不能理解为对本实用新型的具体限定。
[0026]
以下具体实施方式中,以膜壳和电芯的来料方向为前方,电芯封边成形的方向为后方。
[0027]
具体实施方式一
[0028]
一种柔性封装装置,包括机架11和安装在机架11上方的电芯来料机构1、转移机器人ⅰ2、膜壳来料机构3、转移机器人ⅱ4、双夹具转盘机构5、转移机器人ⅲ6和双封装转盘机构7,所述转移机器人ⅱ4设置在膜壳来料机构3和双夹具转盘机构5之间,所述转移机器人ⅱ4将膜壳来料机构3上冲压成型后的膜壳移送至双夹具转盘机构5上,所述转移机器人ⅰ2设置在电芯来料机构1和双夹具转盘机构5之间,所述转移机器人ⅰ2将电芯来料机构1上的电芯移送至双夹具转盘机构5上的膜壳内完成合膜,所述转移机器人ⅲ6的机械臂往复摆动于双夹具转盘机构5和双封装转盘机构7之间,所述转移机器人ⅲ6将合膜后的电芯移送至双封装转盘机构7上完成电芯的封装。
[0029]
进一步的,所述双夹具转盘机构5包括转盘ⅰ51和两个入壳合膜机构52,所述入壳合膜机构52呈中心对称安装在转盘ⅰ51上并随转盘ⅰ51旋转,所述转移机器人ⅰ2的机械臂往复摆动于电芯来料机构1和任一个入壳合膜机构52之间,所述转盘ⅰ51的底部设置有转盘驱动机构ⅰ,所述转盘驱动机构ⅰ驱动转盘ⅰ51旋转,所述转盘驱动机构安装在机架11上。
[0030]
进一步的,所述入壳合膜机构52包括底板521、上模板522、下模板523和上模板驱动机构524,所述底板521固定在转盘ⅰ51上,所述下模板523固定在底板521上,所述上模板522与下模板523通过转轴连接,所述上模板驱动机构524固定在底板521上并驱动上模板522绕转轴转动,膜壳放置在下模板523上,电芯放置在膜壳内,上模板驱动机构524驱动上模板522沿转轴转动盖合膜壳,得到合膜后的电芯。
[0031]
进一步的,所述入壳合膜机构52还包括压板525和压板驱动机构526,所述压板驱动机构526安装在底板521上并位于远离转轴的一侧,所述压板525安装在压板驱动机构526上,所述压板驱动机构526驱动压板525移动至下模板523的上方并下压,在盖合膜壳之前,压板525压住电芯,在压板525压住电芯的同时,转盘ⅰ51转动180
°
,上模板522预合膜,压板525抽出,上模板522将膜壳盖合。
[0032]
进一步的,所述上模板驱动机构524包括驱动气缸5241、齿条5242、齿轮5243和齿轮座5244,所述驱动气缸5241水平设置在底板521上,所述齿条5242与驱动气缸5241的气缸杆固定连接,所述齿轮5243与齿条5242啮合,所述齿轮5243转动安装在齿轮座5244上,所述齿轮座5244固定在底板521上,所述转轴的端部与齿轮5243固定连接,所述转轴与下模板523转动连接,所述转轴与上模板522固定连接,驱动气缸5241的气缸杆伸缩带动齿条5242沿气缸杆的轴向移动,齿条5242带动齿轮5243转动,齿轮5243带动转轴转动,转轴带动上模板522转动从而盖合膜壳。
[0033]
进一步的,所述压板驱动机构526包括直线驱动模组、压板气缸5261和气缸固定座5262,所述直线驱动模组固定在底板521上,所述气缸固定座5262传动连接在直线驱动模组的驱动轴5263上,所述压板气缸5261竖直设置在气缸固定座5262上,所述压板525与压板气缸5261的气缸杆固定连接,直线驱动模组与压板气缸5261的共同作用使压板525前后移动和上下移动。
[0034]
优选的,所述直线驱动模组为伺服电机驱动模组。
[0035]
进一步的,所述双封装转盘机构7包括转盘ⅱ71和两个封边机构72,所述两个封边机构72呈中心对称安装在转盘ⅱ71上并随转盘ⅱ71旋转,所述转盘ⅱ71的底部设置有转盘驱动机构ⅱ,所述转盘驱动机构ⅱ驱动转盘ⅱ71旋转,所述转盘驱动机构ⅱ安装在机架11上。
[0036]
进一步的,所述封边机构72包括顶封边机构721和侧封边机构722,所述顶封边机构721和侧封边机构722并列设置,所述顶封边机构721和侧封边机构722之间设置有转移机器人ⅳ723,所述转移机器人ⅳ723的机械臂往复摆动于顶封边机构721与侧封边机构722,所述转移机器人ⅲ6将合膜后的电芯移送至双封装转盘机构7的顶封边机构721上完成电芯的顶封,然后转移机器人ⅳ723将顶封边后的电芯转移至侧封边机构722,完成电芯的侧封。
[0037]
进一步的,所述柔性封装装置还包括封印检测机构9,所述封印检测机构9设置在双封装转盘机构7的右侧并安装在机架11上,所述转移机器人
ⅴ
的机械臂往复摆动于双封装转盘机构7与封印检测机构9之间,电芯封边完成后,转移机器人
ⅴ
将封装后的电芯移动至封印检测机构9上检测电池的封边是否合格。
[0038]
进一步的,所述柔性封装装置还包括膜壳检测机构10,所述膜壳检测机构10设置在膜壳来料机构3的左侧并安装在机架11上,所述转移机器人ⅱ4将膜壳来料机构3上的膜壳移送至膜壳检测机构10,检测通过后,转移机器人ⅱ4将检测后的膜壳移送至双夹具转盘机构5上。
[0039]
进一步的,所述转移机器人ⅰ2、转移机器人ⅱ4、转移机器人ⅲ6、转移机器人ⅳ723和转移机器人
ⅴ
均附带有ccd相机,经ccd相机对抓取目标及放置位置拍照定位后,各转移机器人完成精确的抓取和放置动作。
[0040]
具体实施方式二
[0041]
与具体实施方式一方案不同的地方是:所述柔性封装装置还包括电芯缓存机构8,所述电芯缓存机构8设置在电芯来料机构1的左侧并安装在机架11上,所述转移机器人ⅰ2往复于电芯来料机构1与双夹具转盘机构5的入壳合膜机构52之间或电芯来料机构1与电芯缓存机构8之间或电芯缓存机构8与双夹具转盘机构5的入壳合膜机构52之间。根据设置,转移机器人ⅰ2将电芯来料机构1上的电芯移送至入壳合膜机构52或电芯缓存机构8,当来料电芯供不应求时,转移机器人ⅰ2将电芯缓存机构8中的电芯移送至入壳合膜机构52上。
[0042]
具体工作时:
[0043]
转送膜壳的转移机器人ⅱ4吸取冲型后的膜壳放置双夹具转盘机构5的任一个入壳合膜机构52上,转移机器人ⅰ2抓取电芯,经ccd拍照定位后,放入膜壳,完成电芯入壳。入壳后,压板驱动机构526驱动压板525前进压住电芯,入壳合膜机构52的上模板522预合膜,压板525抽出,完成合膜,在压板525压住电芯的同时,转盘ⅰ51旋转180
°
,另一个入壳合膜机构52重复上述动作。
[0044]
转移机器人ⅲ6从安全位移至取料位,此时入壳合膜机构52的上模板522打开,转移机器人ⅲ6夹取合膜后的电芯放置在顶封边机构721,进行顶封,封头压住膜壳后,转移机器人ⅲ6开始回到安全位。同时转移机器人ⅳ723移至顶封边机构721,取走顶封后的电芯转移至侧封边机构722,侧封封头压住膜壳后,转移机器人ⅳ723回到安全位,同时完成侧封。此过程,转移机器人ⅲ6、转移机器人ⅳ723重复上述动作,完成电芯的顶侧封。转移机器人
ⅴ
将顶侧封后的电芯移送至封印检测机构9对电芯的封印进行检测。
[0045]
本实用新型中,双夹具转盘机构5的应用,使封装机产能在10ppm以上,入壳合膜机构留有避空位置,以便完成合膜后电芯的转移。同时双封装转盘机构7可一键切换,一套可在线生产,一套可线外调试,改变了原有封装机顶侧封机构停机换型的问题。本实用新型留有电芯缓存机构8,可随时取料;能做到不停机一键检测功能,检测膜壳与封印效果;整体结
构简单,换型时间短,维护方便。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips