
 商标分类
商标分类  商标转让
商标转让 
一种双边传送装置的制作方法
 2021-02-18 03:02:46|
2021-02-18 03:02:46| 123|
123| 起点商标网
起点商标网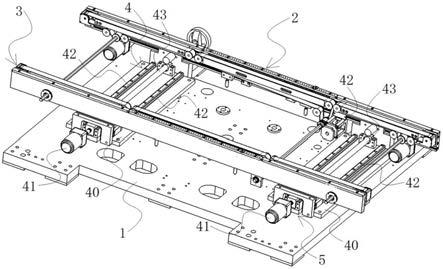
[0001]
本实用新型涉及传送机构技术领域,特别是涉及一种双边传送装置。
背景技术:
[0002]
在工业化生产中,普遍使用传送机构来进行物料输送,对于板状或片状的物料(以下统称为“料板”),例如led透镜的贴装工艺中的led 板,由于料板本身的尺寸大,通常需要使用双边传送装置来输送。
[0003]
如授权公告号为cn207346591u、授权公告日为2018.05.11的中国实用新型专利公开了一种宽度能够调整的运输轨道,并具体公开了宽度能够调整的运输轨道包括并列设置的第一支板和第二支板、设置在第一支板内侧的第一输送带、设置在第二支板内侧的第二输送带,第一支板安装在横向移动块上,横向移动块上设有丝杆螺母,丝杆螺母与丝杠配合,横向移动块上设有导向套,导向套与导向杆配合,丝杆与导向杆平行,丝杆与第一电机连接。第一电机驱动丝杆,在导向杆的导向下,丝杠驱动丝杆螺母横向移动,丝杠螺母带动横向移动块及其上的第一支板横向移动,第一支板接近或远离第二支板,如此,第一支板和第二支板的距离可调,以适应不同尺寸的产品。
[0004]
现有技术中的输运轨道利用丝杠螺母机构来调整两边输送带之间的宽度,由于传送机构的输送距离普遍较远。在实际工作中,两边传动带的微小位移即可导致双边传送装置形成喇叭口,进而不能保证精确、稳定地输送料板。
[0005]
综上所述,现有技术中的输送轨道在出现喇叭口情况时,无法进行自动修正调平,以及确保料板输送精度的问题。
技术实现要素:
[0006]
为了解决上述问题,本实用新型的目的在于提供一种双边传送装置,以解决现有输送轨道在出现喇叭口情况时,无法进行自动修正调平,以及确保料板输送精度的问题。
[0007]
本实用新型的双边传送装置的技术方案为:
[0008]
双边传送装置包括底板、第一传送机构和第二传送机构,以及安装在所述底板上的第一调距机构和第二调距机构,所述第一传送机构和第二传送机构并列间隔布置,所述第一传送机构固定安装在所述底板上,所述第二传送机构与所述第一调距机构、第二调距机构传动连接;
[0009]
所述第一调距机构和第二调距机构的结构相同,均包括驱动结构、滑动结构以及两个平行间隔布置的调距导轨,两个所述调距导轨分别垂直于传送方向延伸,所述滑动结构分别与两个所述调距导轨导向配合,所述驱动结构与滑动结构传动连接,所述第一调距机构的滑动结构和第二调距机构的滑动结构分别安装在所述第二传送机构的靠近端部位置;
[0010]
所述双边传送装置还包括测距模块和控制器,所述测距模块用于检测所述第一传送机构和第二传送机构之间的距离,所述控制器分别与所述测距模块、所述驱动结构电性
连接;所述控制器用于接收所述测距模块的检测信号,并将检测距离与设定距离对比计算出偏移量,根据偏移量控制对应的所述驱动结构工作。
[0011]
有益效果:滑动结构导向安装在两个平行间隔布置的调距导轨上,使滑动结构的两侧受到导向作用,保证了滑动结构的移动精度,避免了滑动结构可能出现偏摆和位置倾斜的问题,实现了精准、平衡地驱动滑动结构以及第二传送机构的目的。而且,利用测距模块检测出第一传送机构和第二传送机构之间的距离,并将检测信号传递至控制器,由控制器将检测信号转换成检测距离,将检测距离与控制器中的设定距离进行对比计算出偏移量,控制器根据该偏移量向对应的调距机构发出调宽和调窄信号;根据检测距离与控制器中的设定距离对比计算出的偏移量为正值时,则说明检测距离大于设定距离,即该位置的第二传送机构与第一传送机构之间距离变宽,控制器向对应的调距机构发出调窄信号;反之,控制器发出调宽信号,对应的驱动结构工作从而实现了自动修正调平的目的。
[0012]
进一步的,所述驱动结构为丝杠螺母机构,所述丝杠螺母机构包括驱动电机、丝杠和螺母,所述驱动电机与所述丝杠传送连接,所述螺母固定安装在所述滑动结构上且与丝杠螺纹配合,所述丝杠布置在两个所述调距导轨的中间位置。
[0013]
进一步的,所述滑动结构包括两个位于下部的滑块、安装在两个所述滑块上侧的支撑板,两个所述滑块之间设有供螺母安装的容置空间,所述第二传送机构安装在所述支撑板上。
[0014]
进一步的,所述调距导轨的截面形状为工字型,所述滑块上设有与所述调距导轨凹凸配合的t形滑槽。
[0015]
进一步的,所述第一调距机构还包括基板,所述基板固定安装在所述底板上,两个所述调距导轨固定在所述基板上。
[0016]
进一步的,所述测距模块设有两个,两个所述测距模块分别设置在对应所述第一调距机构和第二调距机构的位置。
[0017]
进一步的,所述测距模块为红外测距传感器、激光测距传感器和超声波测距传感器中的任意一种。
[0018]
进一步的,所述驱动电机为步进电机,所述步进电机的主轴与所述丝杠止转连接。
[0019]
进一步的,所述控制器中设有允许浮动区间,所述控制器用于在所述偏移量介于所述允许浮动区间时控制所述驱动结构停机、在所述偏移量超出所述允许浮动区间时控制对应的所述驱动结构工作。
[0020]
进一步的,所述允许浮动区间为-2mm至2mm。
附图说明
[0021]
图1为本实用新型的双边传送装置的具体实施例1中双边传送装置的立体示意图;
[0022]
图2为本实用新型的双边传送装置的具体实施例2中双边传送装置(另一个视角)的立体示意图;
[0023]
图3为图1中双边传送装置的俯视示意图;
[0024]
图4为图1中第一调距机构的放大示意图。
[0025]
图中:1-底板、2-第一传送机构、3-第二传送机构、4-第一调距机构、40-基板、41-驱动电机、42-调距导轨、43-丝杠、44-滑动结构、 440-滑块、441-支撑板、
45-螺母、5-第二调距机构。
具体实施方式
[0026]
下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
[0027]
本实用新型的双边传送装置的具体实施例1,如图1至图4所示,双边传送装置包括底板1、第一传送机构2和第二传送机构3,以及安装在底板1上的第一调距机构4和第二调距机构5,第一传送机构2 和第二传送机构3并列间隔布置。其中,第一传送机构2固定安装在底板1上,第二传送机构2与第一调距机构4、第二调距机构5传动连接。具体的,第一传送机构2和第二传送机构3均为皮带传送机,分别包括皮带轮、皮带和皮带电机,第一传送机构2和第二传送机构3 在底板1的板面上呈横向延伸布置,且第一传送机构2和第二传送机构3之间的距离小于料板的宽度,保证料板能够稳定地架在第一传送机构2和第二传送机构3的输送面上,第一传送机构2和第二传送机构3同步工作将料板横向平移输送。
[0028]
第一调距机构4和第二调距机构5分别设置在第二传送机构3的靠近端部位置,第一调距机构4和第二调距机构4结构相同,在本实施例中,以第一调距机构4为例详细说明。第一调距机构4包括驱动结构、滑动结构44以及两个平行间隔布置的调距导轨42,两个调距导轨42分别垂直于传送方向延伸,滑动结构44分别与两个调距导轨42 导向配合,驱动结构与滑动结构44传动连接。通过驱动结构带动滑动结构44运动,滑动结构44与两个调距导轨42导向配合,使滑动结构 44沿垂直于传送方向进行平移运动,进而通过滑动结构44带动第二传送机构3发生纵向调平动作。
[0029]
具体的,第一调距机构4还包括基板40,基板40固定安装在底板 1上,两个调距导轨42固定在基板40上。驱动结构为丝杠螺母机构,丝杠螺母机构包括驱动电机41、丝杠43和螺母45,驱动电机41与丝杠43传送连接,螺母45固定安装在滑动结构44上,且螺母45与丝杠43螺纹配合,丝杠43布置在两个调距导轨42的中间位置。丝杠螺母机构位于两个调距导轨42的中间位置,从而使滑动结构44的中部受到驱动作用力、两侧受到导向作用,保证了滑动结构44的移动精度,避免了滑动结构44可能出现偏摆和位置倾斜的问题,实现了精准、平衡地驱动滑动结构44以及第二传送机构5的目的。
[0030]
其中,滑动结构44包括两个位于下部的滑块440、安装在两个滑块440上侧的支撑板441,两个滑块440之间设有供螺母45安装的容置空间,第二传送机构3安装在支撑板441上。即两个滑块440分别位于滑动结构44的下部两侧,螺母45设置在两个滑块440的中间,第二传送机构3安装在滑动结构44的支撑板441上,提高了滑动结构 44的导向移动的平稳性,进而确保了滑动结构44能够精准地传动第二传送机构3,实现精确地调平第二传送机构3。为了保证滑块440与调距导轨42之间导向装配的可靠性,调距导轨42的截面形状为工字型,滑块440上设有与调距导轨42凹凸配合的t形滑槽。滑块440的t形滑槽与调距导轨42凹凸配合,并且滑块440与调距导轨42之间形成了防脱挡止作用,避免了滑块440在导向移动过程中可能出现浮动脱离的问题。
[0031]
双边传送装置还包括测距模块和控制器(图中未示出),测距模块用于检测第一传送机构2和第二传送机构3之间的距离,控制器分别与测距模块、驱动结构电性连接,控制器用于接收测距模块的检测信号,并将检测距离与设定距离对比计算出偏移量,根据偏移量
控制对应的驱动结构工作。在本实施例中,测距模块设有两个,两个测距模块分别设置在对应第一调距机构4和第二调距机构5的位置。具体的,测距模块为红外测距传感器,红外测距传感器包括红外发射元件和红外接收元件,利用红外发射元件发出的红外光照射在被测距物,被测距物将红外光反射回来并被红外接收元件感应到,根据发射和接收的时间差来计算出被测距离。
[0032]
对应第一调距机构4位置的测距模块,检测出第一传送机构2和第二传送机构3在该位置处的距离,并将检测信号传递至控制器,由控制器将检测信号转换成检测距离,将检测距离与控制器中的设定距离进行对比计算出偏移量,该偏移量为第二传送机构3与第一传送机构2对应第一调距机构4位置处的偏移量,控制器根据该偏移量向第一调距机构4发出调宽和调窄信号。相对应的,对应第二调距机构5 位置的测距模块,检测出第一传送机构2和第二传送机构3在该位置处的距离,并将检测信号传递至控制器,由控制器将检测信号转换成检测距离,将检测距离与控制器中的设定距离进行对比计算出偏移量,该偏移量为第二传送机构3与第一传送机构2对应第二调距机构5位置处的偏移量,控制器根据该偏移量向第二调距机构5发出调宽和调窄信号。
[0033]
根据检测距离与控制器中的设定距离对比计算出的偏移量为正值时,则说明检测距离大于设定距离,即该位置的第二传送机构3与第一传送机构2之间距离变宽,控制器向对应的调距机构发出调窄信号。驱动结构根据控制器发出的信号工作,具体的,丝杠螺母机构的驱动电机为步进电机41,步进电机41的主轴与丝杠43止转连接,通过控制步进电机41的主轴的转动角度来精确控制滑动结构44以及第二传送机构3的位移量,步进电机驱动第二传送机构3进行调宽动作的精度更高。例如:步进电机41的主轴逆时针转动270
°
,则滑动结构44 以及第二传送机构3朝靠近第一传送机构2的方向调窄1.5mm;步进电机41的主轴顺时针转动180
°
,则滑动结构44以及第二传送机构3 朝远离第一传送机构2的方向调宽1mm。
[0034]
为了避免第一调距机构4和第二调距机构5频繁地启动工作,在控制器中设有允许浮动区间,控制器在偏移量介于允许浮动区间时控制驱动结构停机、在偏移量超出允许浮动区间时控制对应的驱动结构工作。具体的,控制器中的允许浮动区间为-2mm至2mm。当第二传送机构3的偏移量介于允许浮动区间时,即此时第二传送机构3的偏移幅度在允许的范围内,控制器控制第一调距机构4或第二调距机构5 保持停机,第一传送机构2和第二传送机构3能够精准平稳地输送料板;当第二传送机构3的偏移量超出允许浮动区间时,即此时第二传送机构3的偏移幅度过大,控制器控制第一调距机构4或第二调距机构5工作,将第二传送机构3修正调平至与第一传送机构2平行的等宽位置,实现了自动修正调平的目的。
[0035]
本实用新型的双边传送装置的其他具体实施例,为了满足不同使用需求,测距模块不仅限于具体实施例1中的红外测距传感器,还可将红外测距传感器替换成激光测距传感器或超声波测距传感器,同样能够实现自动检测第一传送机构和第二传送机构之间的距离的目的。
[0036]
本实用新型的双边传送装置的其他具体实施例,为了满足不同使用需求,控制器中的允许浮动区间不仅限于具体实施例1中的-2mm至 2mm,还可将控制器中的允许浮动区间调整成-1mm至1mm、-2mm至2mm、-5mm至5mm,或者其他数值区间均可,同样能够得到减少调距机构的工作频率,兼顾了保证第一传送机构和第二传送机构的平行度的要求。
[0037]
以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技
术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本实用新型的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 螺母

 热门咨询
热门咨询




tips