
 商标分类
商标分类  商标转让
商标转让 
一种用飞轮进行姿态控制的无人机的制作方法
 2021-02-13 14:02:37|
2021-02-13 14:02:37| 314|
314| 起点商标网
起点商标网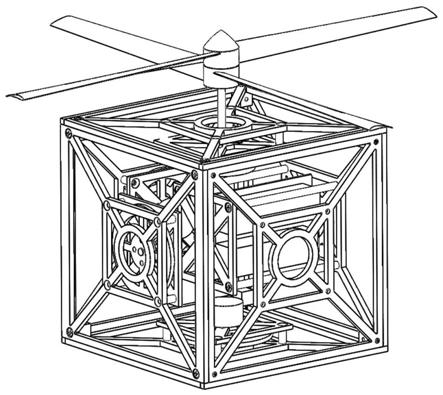
[0001]
本发明涉及一种无人机,其特点在于使用了共轴双桨的旋翼系统,以及使用飞轮作为其转向的驱动装置。
技术背景
[0002]
在常见的旋翼无人机的操控过程中,由于其进行俯仰、偏航、滚转等动作时,主要由不同旋翼之间的力的差值或是力矩的差值进行控制的,由于力的差值或者力矩差值难以计算或预估,往往导致无人机在进行俯仰、偏航、滚转等动作时过程不平滑,产生较大的震荡,且需要反复调整以达到预期位置。因此我们希望将这一缺点进行改进,考虑到由于飞轮产生控制力以及控制力矩较为稳定,突变小,力矩平缓,因此我们希望将飞轮应用于无人机控制中,使无人机的控制更加平稳。
[0003]
同时,对于一般的没有尾桨的共轴双桨无人机,主要由共轴双旋翼以及舵机作为驱动,利用舵机改变旋翼系统的方向可以实现俯仰与横滚运动,飞行较为平稳,且节省空间,利用这套飞轮系统(单轴)布置与飞行器垂直于螺旋桨驱动轴的一面上,可以实现利用飞轮控制其偏航角。
技术实现要素:
[0004]
本发明,设计了一种新型的无人机的控制方法,可以解决目前常用的无人机的部分问题,式飞行过程更加平稳。
[0005]
为了实现上述目的,本发明采用了如下技术方案:
[0006]
一种利用飞轮进行姿态控制的无人机。
[0007]
其中无人机本体主要由外部框架、飞轮、旋翼机构、飞轮电机、旋翼电机、主控板、飞轮电机基座、旋翼电机基座以及主控基座构成。三个飞轮相互垂直,用于控制无人机俯仰、横滚与偏航轴的倾角,从而控制无人机的飞行方向;旋翼机构是一个共轴双桨旋翼,上下两个旋翼旋向相反,转速相同。
[0008]
外部框架是无人机的主要结构,其外观上是一个中空立方体,飞轮电机基座、主控基座、旋翼电机基座,三种基座与外部框架通过连接柱固定,连接柱的具体长度与飞轮厚度和电机轴长度有关。
[0009]
飞轮利用法兰联轴器固定在电机轴上,位于外部框架与电机基座之间,飞轮与联轴器的总厚度不超过电机轴可使用的长度。飞轮电机固定在电机基座上,其轴指向外部框架方向,但不超出外部框架平面,三个平面以及螺旋桨电机皆如此安装。
[0010]
旋翼电机被固定在旋翼电机基座上,电机轴延伸到外部框架之外,以便在电机轴上安装共轴双桨旋翼机构,旋翼电机基座固定通过连接柱固定在外部框架上。
[0011]
无人机的主控以及电池被固定在主控基座上,主控基座通过连接柱与外部框架连接、固定,以防止支架晃动导致主控产生位移。主控位于整个外部框架的正中心。
[0012]
本发明的技术效果如下:
[0013]
1.一种新型的无人机控制方式,相比四旋翼的控制方式,使用飞轮转速控制力矩,控制效果更加平稳,防止出现误操作导致的力矩突变以及姿态突变。
[0014]
2.为共轴双旋翼无尾桨的无人机设计了一种新的控制思路,不局限于舵机控制的方式,使用舵机直接控制翼面角度会使舵机受到较大载荷,而且直接控制翼面会产生较大抖动,影响操控或者航拍效果。
附图说明
[0015]
图1为本发明提出的无人机的整体外观展示;
[0016]
图2为本发明提出的无人机的结构示意图;
[0017]
图3为本发明提出的无人机内部电机—飞轮驱动系统结构示意图;
[0018]
图4为本发明提出的无人机内部电机—共轴双桨旋翼系统结构示意图;
[0019]
图5为本发明提出的无人机内部主控及基座的结构示意图;
[0020]
图中:1-无人机本体、2-连接机构、3-无人机外部框架、4-连接柱、5-飞轮电机基座、6-飞轮、7-飞轮电机、8-法兰联轴器、9-共轴双桨旋翼、10-旋翼电机基座、11-旋翼电机、12-主控基座、13-主控板、14-电池组。
具体实施方式
[0021]
为了清楚说明本方案的技术特点,将结合附图,对于方案实施的具体方案进行详细阐述。
[0022]
参照附图所示,能够展示出无人机1的完整内部结构,可以看到主要内部结构,包括外框架3、飞轮6、两种大小不同的电机(飞轮电机7与旋翼电机11)、共轴双桨旋翼结构9、主控13与电池组14。所述无人机的外部框架3、基座5(10、12)等结构采用轻型的abs材料、由3d打印获得,减轻结构质量,飞轮6部分使用了铝合金材料。
[0023]
所述无人机1的结构主要被固定在外部框架3上。共轴双桨旋翼机构安装在旋翼电机11上,旋翼电机11被固定在旋翼电机基座10上,基座10通过连接柱4固定在外框架3上。飞轮机构利用法兰联轴器8安装在飞轮电机7上,飞轮电机7被固定在飞轮电机基座5上,基座5通过连接柱4固定在外框架3上。主控13与电池14安装在主控基座12上,主控板13位于外部框架3结构的几何中心位置,主控基座12也由连接柱4固定在外部框架3上。
[0024]
所述无人机1采用共轴双桨旋翼结构9,由旋翼电机11驱动、能源来自电池组14。其主要结构为两个旋向相反的旋翼以及内部的传动结构,保证其旋向相反但转速相同,产生的扭矩相互抵消,使无人机1在偏航轴能保持稳定。
[0025]
所述无人机1采用飞轮6作为姿态控制以及稳定的装置。主要原理:三个飞轮6机构相互垂直,分别控制无人机1的偏航轴、俯仰轴、滚转轴的姿态。主要控制力矩通过飞轮6加减转速时产生的转矩提供。在俯仰轴与滚转轴通过控制力矩实现无人机1整体的角度偏转,此时旋翼6相对于水平面的角度也会发生改变,其由升力产生的分力就会带动无人机1朝需要的方向前进,但同时由于在垂直地面方向上,无人机1的升力相对下降,因此需要相应的提高升力大小。在偏航轴,可以直接通过飞轮的加减速改变无人机1的偏航角。
[0026]
在此前提下,可对无人机1进行适当改造,例如使用有差动传动结构的共轴双桨旋翼9系统,利用该结构可以控制上下旋翼的转速,以实现偏航角的控制,进一步可以减少一
个偏航轴上的电机7-飞轮6机构等。因此以上所述只是针对本发明的其中一种优选方案,但本发明的保护范围并不局限于此。对于本发明所属技术领域的普通技术人员来说,在本发明的基础上还可以做出若干的技术推演以及推算,都应当属于本发明的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips