
 商标分类
商标分类  商标转让
商标转让 
一种用于遥感卫星定姿的非线性滤波方法与流程
 2021-02-13 14:02:03|
2021-02-13 14:02:03| 402|
402| 起点商标网
起点商标网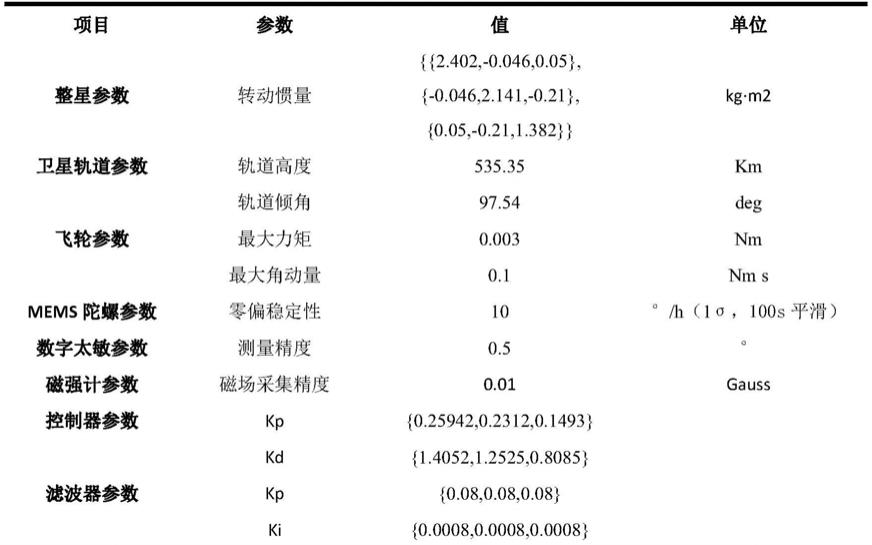
[0001]
本发明属于航空航天领域,具体涉及一种用于遥感卫星定姿的非线性滤波方法。
背景技术:
[0002]
高精度的姿态控制是遥感卫星实现其他功能的前提。随着商业航天产业的不断发展,低成本、低重量、低功耗、高分辨率成为了目前发展的新趋势。利用较低成本的姿态敏感器,来实现较高精度的姿态控制,具有很大的经济意义。
[0003]
卫星在轨稳定运行期间,对日定向三轴稳定模式是卫星长期的姿控运行模式,卫星帆板对日以给蓄电池充电,保证整星能源充足。考虑到经济原因以及姿控单机布局方式等的影响,对日三轴期间可能较长时间使用双矢量(磁矢量与太阳矢量)协同mems陀螺定姿。由于双矢量定姿稳定度较差,飞轮转速会长期处于较大波动状态,对飞轮寿命有所损耗。
技术实现要素:
[0004]
本发明提供一种用于遥感卫星定姿的非线性滤波方法,将双矢量定姿结果与陀螺积分定姿结果进行滤波处理,在保证定姿结果与真实姿态偏差很小的情况下,提高定姿结果的稳定度,进而降低飞轮转速波动,提高飞轮使用寿命。
[0005]
本发明通过以下技术方案实现:
[0006]
一种用于遥感卫星定姿的非线性滤波方法,所述非线性滤波方法包括以下步骤:
[0007]
步骤1:计算陀螺积分定姿姿态;
[0008]
步骤2:计算双矢量定姿姿态;
[0009]
步骤3:利用步骤1和步骤2的计算结果再计算双矢量定姿姿态与陀螺积分定姿姿态偏差;
[0010]
步骤4:利用步骤1-3的计算结果再次计算角速度补偿值以及滤波姿态。
[0011]
进一步的,所述步骤1的计算陀螺积分定姿姿态具体为,定义卫星本体系相对于惯性系的角速度,前一周期为ω0,当前周期为ω1;定义陀螺积分定姿四元数为q
g
,前一周期的定姿姿态为q0;定义为四元数乘法;定义dt为积分步长;采用4阶龙格库塔法计算陀螺积分姿态为:
[0012][0013][0014][0015][0016]
[0017][0018][0019][0020]
上式中,k1、k2、k3为计算过程中间变量。
[0021]
进一步的,所述步骤2计算双矢量定姿姿态具体为,
[0022]
定义卫星本体系下的太阳矢量为v
sunb
,惯性系下的太阳矢量为v
sunj
;定义卫星本体系下的磁场矢量为v
magb
,惯性系下的磁场矢量为v
magj
;定义双矢量定姿四元数为q
triad
,由方向余弦阵a计算得来;双矢量定姿姿态计算过程为:
[0023][0024][0025]
m
r
=[r
1 r
2 r3]m
s
=[s
1 s
2 s3]
[0026][0027]
上式中,r1、r2、r3为计算过程中间变量。
[0028]
进一步的,所述步骤3计算双矢量定姿姿态与陀螺积分定姿姿态偏差具体为,
[0029]
根据计算出来的双矢量定姿四元数q
triad
,以及陀螺积分定姿四元数q
g
,计算出二者姿态偏差四元数q
e
为:
[0030][0031]
进一步的,步骤4计算角速度补偿值以及滤波姿态,滤波器采用pi补偿策略。定义系数p为k
p
,系数i为k
i
,具体包括以下步骤:
[0032]
步骤4.1:定义偏差四元数的积分补偿门限为q
hold
;若q
e
的标部q
e
[0]<q
hold
,则认为此时二者姿态偏差过大,不对q
e
的矢部进行积分;若q
e
的标部q
e
[0]≥q
hold
,则对偏差四元数q
e
的矢部进行积分,积分结果表示为q
e_tmp
;
[0033]
步骤4.2:定义积分项折算出来的角速度为ω
c_i
,则:
[0034]
ω
c_i
=k
i
*q
e_tmp
;
[0035]
步骤4.3:对积分项结果进行限幅;定义最大零偏修正量绝对值为d
max
;
[0036]
ω
c_i
为正时:
[0037]
ω
c_i
=min(d
max
,ω
c_i
)
[0038]
ω
c_i
为非正时:
[0039]
ω
c_i
=max(-d
max
,ω
c_i
);
[0040]
步骤4.4:定义角速度补偿值为ω
c
,q
e
的矢部为q
ey
;则
[0041]
ω
c
=k
p
*q
ey
+ω
c_i
[0042]
步骤4.5:每周期,计算ω
c
校正星体角速度;定义前一周期补偿后的角速度为ω
before
,当前周期补偿后的角速度为ω
now
,前一周期的滤波姿态为q
before
;则当前周期的滤
波姿态q
now
利用4阶龙格库塔法计算为:
[0043][0044][0045][0046][0047][0048][0049][0050][0051]
本发明的有益效果是:
[0052]
本发明提供了一种用于遥感卫星定姿的非线性滤波方法,能够提高双矢量定姿期间卫星的姿态稳定度,使飞轮转速波动范围大幅度减小,提高了飞轮使用寿命;该滤波方法结构简单,易于实现,能够应用于工程实际中。
附图说明
[0053]
图1本发明的结构示意图。
[0054]
图2本发明滤波前后星体惯性系下mems陀螺角速度示意图。
[0055]
图3本发明滤波前后星体三轴飞轮转速示意图。
[0056]
图4本发明滤波前后星体x轴定姿四元数示意图。
[0057]
图5本发明滤波前后星体y轴定姿四元数示意图。
[0058]
图6本发明滤波前后星体z轴定姿四元数示意图。
具体实施方式
[0059]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0060]
实施例1
[0061]
1.一种用于遥感卫星定姿的非线性滤波方法,其特征在于,所述非线性滤波方法包括以下步骤:
[0062]
步骤1:计算陀螺积分定姿姿态;
[0063]
定义卫星本体系相对于惯性系的角速度,前一周期为ω0,当前周期为ω1;定义陀螺积分定姿四元数为q
g
,前一周期的定姿姿态为q0;定义为四元数乘法;定义dt为积分步
长;采用4阶龙格库塔法计算陀螺积分姿态为:
[0064][0065][0066][0067][0068][0069][0070][0071][0072]
上式中,k1、k2、k3为计算过程中间变量。
[0073]
步骤2:计算双矢量定姿姿态;
[0074]
定义卫星本体系下的太阳矢量为v
sunb
,惯性系下的太阳矢量为v
sunj
;定义卫星本体系下的磁场矢量为v
magb
,惯性系下的磁场矢量为v
magj
;定义双矢量定姿四元数为q
triad
,由方向余弦阵a计算得来;双矢量定姿姿态计算过程为:
[0075][0076][0077]
m
r
=[r
1 r
2 r3]m
s
=[s
1 s
2 s3]
[0078][0079]
上式中,r1、r2、r3为计算过程中间变量。
[0080]
步骤3:利用步骤1和步骤2的计算结果再计算双矢量定姿姿态与陀螺积分定姿姿态偏差;
[0081]
根据计算出来的双矢量定姿四元数q
triad
,以及陀螺积分定姿四元数q
g
,计算出二者姿态偏差四元数q
e
为:
[0082][0083]
步骤4:利用步骤1-3的计算结果再次计算角速度补偿值;
[0084]
滤波器采用pi补偿策略。定义系数p为k
p
,系数i为k
i
,具体包括以下步骤:
[0085]
步骤4.1:定义偏差四元数的积分补偿门限为q
hold
;若q
e
的标部q
e
[0]<q
hold
,则认为此时二者姿态偏差过大,不对q
e
的矢部进行积分;若q
e
的标部q
e
[0]≥q
hold
,则对偏差四元数q
e
的矢部进行积分,积分结果表示为q
e_tmp
;
[0086]
步骤4.2:定义积分项折算出来的角速度为ω
c_i
,则:
[0087]
ω
c_i
=k
i
*q
e_tmp
;
[0088]
步骤4.3:考虑到滤波收敛后,积分项结果即为mems陀螺零偏修正量。实际卫星在轨运行时,mems陀螺零偏已经补偿过,此修正量不会非常大;因此对积分项结果进行限幅;定义最大零偏修正量绝对值为d
max
;
[0089]
ω
c_i
为正时:
[0090]
ω
c_i
=min(d
max
,ω
c_i
)
[0091]
ω
c_i
为非正时:
[0092]
ω
c_i
=max(-d
max
,ω
c_i
);
[0093]
步骤4.4:定义角速度补偿值为ω
c
,q
e
的矢部为q
ey
;则
[0094]
ω
c
=k
p
*q
ey
+ω
c_i
[0095]
步骤4.5:每周期,计算ω
c
校正星体角速度;定义前一周期补偿后的角速度为ω
before
,当前周期补偿后的角速度为ω
now
,前一周期的滤波姿态为q
before
;则当前周期的滤波姿态q
now
利用4阶龙格库塔法计算为:
[0096][0097][0098][0099][0100][0101][0102][0103][0104]
实施例2
[0105]
结合实际仿真各参数阈值,滤波算法简要流程图如图1所示。其中偏差四元数积分保护门限设为0.9999,积分项折算出来的角速度限幅值为100
°
/h。
[0106]
在半物理仿真平台上,对该滤波算法进行验证。从初始入轨状态开始,卫星经过阻尼模式、对日捕获与定向模式,进入并长期运行在三轴对日稳定模式。仿真输入如表1所示。
[0107]
滤波前后星体三轴惯性系下mems陀螺角速度如图2所示,滤波前后星体三轴飞轮转速如图3所示,滤波前后星体x轴定姿四元数如图4所示,滤波前后星体y轴定姿四元数如图5所示,滤波前后星体z轴定姿四元数如图6所示。仿真结果显示,滤波后星体三轴定姿四元数噪声明显变小,对稳定度的提高以及飞轮转速波动的降低非常明显。表明此非线性滤波可以用于遥感卫星双矢量定姿期间。
[0108]
表1非线性滤波仿真输入
[0109]
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips