
 商标分类
商标分类  商标转让
商标转让 
一种系留旋翼自动升降收放机构及其使用方法与流程
 2021-02-13 14:02:31|
2021-02-13 14:02:31| 309|
309| 起点商标网
起点商标网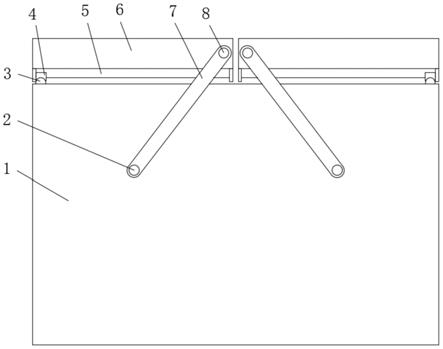
[0001]
本发明涉及无人机技术领域,尤其涉及一种系留旋翼自动升降收放机构及其使用方法。
背景技术:
[0002]
进入21世纪以来,无人机的研究受到了全球的广泛关注,尤其是随着新型材料、微机电、微惯导以及飞行控制等技术的进步,小型旋翼飞行器(无人机)得到了迅速发展,并逐渐成为人们关注的焦点;一般来说。受旋翼前飞时周向气流不对称的制约,小型无人机的旋翼直径大多保持在1m以内,有效载荷小于5kg,具备较高的悬停和中低速飞行性能。并且通过加装传感器、定位装置和导航装置等电子设备,使这种小型无人机具备了自主飞行和执行特种任务的能力。成为了真正意义的无人机。
[0003]
现有的小型无人机系统不能自动收放无人机,收放速度慢,收放时需要人工干预,在收放过程中会浪费大量时间,而且在回收无人机时没有保护措施,容易损坏无人机,所以我们提出一种系留旋翼自动升降收放机构及其使用方法,用以解决上述所提到的问题。
技术实现要素:
[0004]
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种系留旋翼自动升降收放机构及其使用方法。
[0005]
为了实现上述目的,本发明采用了如下技术方案:
[0006]
一种系留旋翼自动升降收放机构,包括自动升降收放箱和无人机,所述无人机放置在自动升降收放箱的内部,所述自动升降收放箱的顶部四角均转动连接有万向球,位于同一侧的两个所述万向球的顶部滑动连接有同一个箱门,所述箱门的两侧设置有用于转动箱门的转动组件,所述自动升降收放箱的两侧内壁滑动连接有两个连接板,两个所述连接板相互靠近的一侧固定连接有同一个第一横板,所述第一横板的顶部设置有用于保护无人机的保护组件,所述自动升降收放箱的底部内壁设置有用于升降第一横板的升降组件,所述无人机电性连接有电缆。
[0007]
优选地,所述转动组件包括固定连接在箱门的两侧的第一固定柱,所述第一固定柱的一端转动连接有转板,所述转板的一侧固定连接有第一转杆,所述第一转杆的一端贯穿自动升降收放箱并固定连接有第一齿轮,所述第一转杆与自动升降收放箱转动连接,所述连接板的一侧固定连接有与第一齿轮相适配的齿条,所述齿条与第一齿轮相啮合。
[0008]
优选地,所述保护组件包括固定连接在第一横板顶部的对称设置的两个第一套筒,两个所述连接板相互靠近的一侧均滑动连接有同一个第二横板,所述第二横板的底部固定连接有对称设置的两个第二套筒,所述无人机放置在第二横板的顶部,所述第二套筒的顶部内壁固定连接有弹簧,所述弹簧的底部与第一套筒的顶部固定连接,所述第一套筒的外壁固定套设有摩擦垫,所述摩擦垫的外壁与第二套筒的内壁相接触。
[0009]
优选地,所述升降组件包括固定连接在自动升降收放箱的底部内壁的第三安装板
和第二安装板,所述第三安装板的一侧固定连接有正反转电机,所述正反转电机的输出轴贯穿第三安装板并固定连接有第一转轴,所述第一转轴的外壁固定套设有第二齿轮,所述第二安装板和第三安装板相互靠近的一侧转动连接有第三转轴,所述第三转轴的外壁固定套设有第三齿轮,所述第三安装板的一侧固定连接有电动推杆,所述电动推杆的活塞杆贯穿第三安装板并固定连接有第二转轴,所述第二转轴的外壁转动套设有第四齿轮,所述第四齿轮位于第三齿轮和第二齿轮之间并分别与第二齿轮与第三齿轮相啮合。
[0010]
优选地,所述第三转轴的一端贯穿第二安装板并固定连接有固定板,所述固定板的一端转动连接有升降杆,所述升降杆的顶部与第一横板的底部转动连接。
[0011]
优选地,所述自动升降收放箱的底部内壁固定连接有第一安装板,所述第一转轴的一端贯穿第二安装板并与第一安装板的一侧转动连接,所述第一转轴的外壁固定套设有卷筒,所述电缆绕设在卷筒的外壁。
[0012]
优选地,所述自动升降收放箱的底部内壁固定连接有第一安装板,所述第一转轴的一端贯穿第二安装板并与第一安装板的一侧转动连接,所述第一转轴的外壁固定套设有卷筒,所述电缆绕设在卷筒的外壁。
[0013]
优选地,两个所述第二套筒相互靠近的一侧均固定连接有第二滑轨,所述第二横板的两端均固定连接有与第二滑轨相适配的第二滑块,所述第二滑块与第二滑轨滑动连接。
[0014]
所述一种系留旋翼自动升降收放机构的使用方法,它包括以下步骤:
[0015]
s1、将自动升降收放箱放置在指定的位置上,需要无人机执行任务时,启动正反转电机,使正反转电机正转,正反转电机的输出轴带动第一转轴转动,第一转轴带动第二齿轮和卷筒转动,卷筒带动电缆转动,第二齿轮带动第四齿轮转动,第四齿轮带动第三齿轮转动,第三齿轮带动第三转轴转动,第三转轴带动固定板转动,固定板带动升降杆竖直向上移动;
[0016]
s2、升降杆带动第一横板竖直向上移动,第一横板带动连接板竖直向上移动,连接板带动齿条竖直向上移动,齿条带动第一齿轮转动,第一齿轮带动第一转杆转动,第一转杆带动转板转动,转板带动第一固定柱转动,第一固定柱带动箱门转动并横向移动,直至两个箱门相互远离并完全打开;
[0017]
s3、启动电动推杆,电动推杆的活塞杆带动第二转轴横向移动,第二转轴带动第四齿轮横向移动并与第二齿轮和第三齿轮解除啮合状态,此时无人机位于自动升降收放箱的外部,启动无人机,无人机带动电缆竖直上升,直至无人机到达指定高度时,关闭正反转电机,无人机保持在该高度执行任务;
[0018]
s4、在任务执行完成后,使无人机竖直下降,启动正反转电机,使正反转电机反转,并启动电动推杆,电动推杆的活塞杆带动第二转轴横向移动,第二转轴带动第四齿轮横向移动并与第二齿轮和第三齿轮重新啮合,正反转电机的输出轴最终带动电缆反转重新绕在卷筒上,无人机下降至第二横板上,无人机的冲击力带动第二横板竖直下降,第二横板带动第二套筒竖直向下移动,第二套筒挤压弹簧,第二套筒与摩擦垫相互摩擦以减小冲击力,用来保护无人机,并且正反转电机的输出轴带动升降杆竖直向下移动,升降杆最终带动连接板竖直向下移动,连接板带动第一齿轮反向转动,第一齿轮带动转板转动,转板拉动两个箱门相互靠近,并完成无人机的收回。
[0019]
与现有技术相比,本发明的有益效果是:
[0020]
1、将自动升降收放箱放置在指定的位置上,需要无人机执行任务时,启动正反转电机,使正反转电机正转,正反转电机的输出轴带动第一转轴转动,第一转轴带动第二齿轮和卷筒转动,卷筒带动电缆转动,第二齿轮带动第四齿轮转动,第四齿轮带动第三齿轮转动,第三齿轮带动第三转轴转动,第三转轴带动固定板转动,固定板带动升降杆竖直向上移动;
[0021]
2、升降杆带动第一横板竖直向上移动,第一横板带动连接板竖直向上移动,连接板带动齿条竖直向上移动,齿条带动第一齿轮转动,第一齿轮带动第一转杆转动,第一转杆带动转板转动,转板带动第一固定柱转动,第一固定柱带动箱门转动并横向移动,直至两个箱门相互远离并完全打开;
[0022]
3、启动电动推杆,电动推杆的活塞杆带动第二转轴横向移动,第二转轴带动第四齿轮横向移动并与第二齿轮和第三齿轮解除啮合状态,此时无人机位于自动升降收放箱的外部,启动无人机,无人机带动电缆竖直上升,直至无人机到达指定高度时,关闭正反转电机,无人机保持在该高度执行任务;
[0023]
4、在任务执行完成后,使无人机竖直下降,启动正反转电机,使正反转电机反转,并启动电动推杆,电动推杆的活塞杆带动第二转轴横向移动,第二转轴带动第四齿轮横向移动并与第二齿轮和第三齿轮重新啮合,正反转电机的输出轴最终带动电缆反转重新绕在卷筒上,无人机下降至第二横板上,无人机的冲击力带动第二横板竖直下降,第二横板带动第二套筒竖直向下移动,第二套筒挤压弹簧,第二套筒与摩擦垫相互摩擦以减小冲击力,用来保护无人机,并且正反转电机的输出轴带动升降杆竖直向下移动,升降杆最终带动连接板竖直向下移动,连接板带动第一齿轮反向转动,第一齿轮带动转板转动,转板拉动两个箱门相互靠近,并完成无人机的收回。
[0024]
本发明结构简单,通过正反转电机的正转与反转可以实现电缆的放出与收回,同时利用升降杆可以同时实现箱门的打开与关闭,自动化程度高,并且带有保护组件,可以有效防止无人机回收过程中被损坏的情况发生,操作方便。
附图说明
[0025]
图1为本发明提出的一种系留旋翼自动升降收放机构的主视结构示意图;
[0026]
图2为本发明提出的一种系留旋翼自动升降收放机构的主视剖视结构示意图;
[0027]
图3为本发明的侧视剖视结构示意图;
[0028]
图4为图2中a部分的放大图;
[0029]
图5为本发明中第二齿轮、第三齿轮和第四齿轮的连接示意图;
[0030]
图6为本发明中固定板和升降杆的连接示意图;
[0031]
图7为本发明中第一套筒和第二套筒的主视剖视结构示意图;
[0032]
图8为本发明中电动推杆的俯视图。
[0033]
图中:1、自动升降收放箱;2、第一转杆;3、万向球;4、第一滑块;5、第一滑轨;6、箱门;7、转板;8、第一固定柱;9、第一齿轮;10、齿条;11、连接板;12、第一横板;13、第一套筒;14、第二套筒;15、第二滑轨;16、第二横板;17、第二滑块;18、无人机;19、升降杆;20、第一安装板;21、第二安装板;22、第二齿轮;23、第三安装板;24、正反转电机;25、电动推杆;26、电
缆;27、卷筒;28、第一转轴;29、第二转轴;30、第三转轴;31、第三齿轮;32、第四齿轮;33、固定板;34、摩擦垫;35、弹簧。
具体实施方式
[0034]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0035]
实施例一
[0036]
参照图1-8,一种系留旋翼自动升降收放机构,包括自动升降收放箱1和无人机18,无人机18放置在自动升降收放箱1的内部,自动升降收放箱1的顶部四角均转动连接有万向球3,位于同一侧的两个万向球3的顶部滑动连接有同一个箱门6,箱门6的两侧设置有用于转动箱门6的转动组件,自动升降收放箱1的两侧内壁滑动连接有两个连接板11,两个连接板11相互靠近的一侧固定连接有同一个第一横板12,第一横板12的顶部设置有用于保护无人机18的保护组件,自动升降收放箱1的底部内壁设置有用于升降第一横板12的升降组件,无人机18电性连接有电缆26。
[0037]
本发明中,转动组件包括固定连接在箱门6的两侧的第一固定柱8,第一固定柱8的一端转动连接有转板7,转板7的一侧固定连接有第一转杆2,第一转杆2的一端贯穿自动升降收放箱1并固定连接有第一齿轮9,第一转杆2与自动升降收放箱1转动连接,连接板11的一侧固定连接有与第一齿轮9相适配的齿条10,齿条10与第一齿轮9相啮合。
[0038]
本发明中,保护组件包括固定连接在第一横板12顶部的对称设置的两个第一套筒13,两个连接板11相互靠近的一侧均滑动连接有同一个第二横板16,第二横板16的底部固定连接有对称设置的两个第二套筒14,无人机18放置在第二横板16的顶部,第二套筒14的顶部内壁固定连接有弹簧35,弹簧35的底部与第一套筒13的顶部固定连接,第一套筒13的外壁固定套设有摩擦垫34,摩擦垫34的外壁与第二套筒14的内壁相接触。
[0039]
本发明中,升降组件包括固定连接在自动升降收放箱1的底部内壁的第三安装板23和第二安装板21,第三安装板23的一侧固定连接有正反转电机24,正反转电机24的输出轴贯穿第三安装板23并固定连接有第一转轴28,第一转轴28的外壁固定套设有第二齿轮22,第二安装板21和第三安装板23相互靠近的一侧转动连接有第三转轴30,第三转轴30的外壁固定套设有第三齿轮31,第三安装板23的一侧固定连接有电动推杆25,电动推杆25的活塞杆贯穿第三安装板23并固定连接有第二转轴29,第二转轴29的外壁转动套设有第四齿轮32,第四齿轮32位于第三齿轮31和第二齿轮22之间并分别与第二齿轮22与第三齿轮31相啮合。
[0040]
本发明中,第三转轴30的一端贯穿第二安装板21并固定连接有固定板33,固定板33的一端转动连接有升降杆19,升降杆19的顶部与第一横板12的底部转动连接。
[0041]
本发明中,自动升降收放箱1的底部内壁固定连接有第一安装板20,第一转轴28的一端贯穿第二安装板21并与第一安装板20的一侧转动连接,第一转轴28的外壁固定套设有卷筒27,电缆26绕设在卷筒27的外壁。
[0042]
本发明中,自动升降收放箱1的底部内壁固定连接有第一安装板20,第一转轴28的一端贯穿第二安装板21并与第一安装板20的一侧转动连接,第一转轴28的外壁固定套设有卷筒27,电缆26绕设在卷筒27的外壁。
[0043]
本发明中,两个第二套筒14相互靠近的一侧均固定连接有第二滑轨15,第二横板16的两端均固定连接有与第二滑轨15相适配的第二滑块17,第二滑块17与第二滑轨15滑动连接。
[0044]
一种系留旋翼自动升降收放机构及其使用方法,它包括以下步骤:
[0045]
s1、将自动升降收放箱1放置在指定的位置上,需要无人机18执行任务时,启动正反转电机24,使正反转电机24正转,正反转电机24的输出轴带动第一转轴28转动,第一转轴28带动第二齿轮22和卷筒27转动,卷筒27带动电缆26转动,第二齿轮22带动第四齿轮32转动,第四齿轮32带动第三齿轮31转动,第三齿轮31带动第三转轴30转动,第三转轴30带动固定板33转动,固定板33带动升降杆19竖直向上移动;
[0046]
s2、升降杆19带动第一横板12竖直向上移动,第一横板12带动连接板11竖直向上移动,连接板11带动齿条10竖直向上移动,齿条10带动第一齿轮9转动,第一齿轮9带动第一转杆2转动,第一转杆2带动转板7转动,转板7带动第一固定柱8转动,第一固定柱8带动箱门6转动并横向移动,直至两个箱门6相互远离并完全打开;
[0047]
s3、启动电动推杆25,电动推杆25的活塞杆带动第二转轴29横向移动,第二转轴29带动第四齿轮32横向移动并与第二齿轮22和第三齿轮31解除啮合状态,此时无人机18位于自动升降收放箱1的外部,启动无人机18,无人机18带动电缆26竖直上升,直至无人机18到达指定高度时,关闭正反转电机24,无人机18保持在该高度执行任务;
[0048]
s4、在任务执行完成后,使无人机18竖直下降,启动正反转电机24,使正反转电机24反转,并启动电动推杆25,电动推杆25的活塞杆带动第二转轴29横向移动,第二转轴29带动第四齿轮32横向移动并与第二齿轮22和第三齿轮31重新啮合,正反转电机24的输出轴最终带动电缆26反转重新绕在卷筒27上,无人机18下降至第二横板16上,无人机18的冲击力带动第二横板16竖直下降,第二横板16带动第二套筒14竖直向下移动,第二套筒14挤压弹簧35,第二套筒14与摩擦垫34相互摩擦以减小冲击力,用来保护无人机18,并且正反转电机24的输出轴带动升降杆19竖直向下移动,升降杆19最终带动连接板11竖直向下移动,连接板11带动第一齿轮9反向转动,第一齿轮9带动转板7转动,转板7拉动两个箱门6相互靠近,并完成无人机18的收回。
[0049]
工作原理:将自动升降收放箱1放置在指定的位置上,需要无人机18执行任务时,启动正反转电机24,使正反转电机24正转,正反转电机24的输出轴带动第一转轴28转动,第一转轴28带动第二齿轮22和卷筒27转动,卷筒27带动电缆26转动,第二齿轮22带动第四齿轮32转动,第四齿轮32带动第三齿轮31转动,第三齿轮31带动第三转轴30转动,第三转轴30带动固定板33转动,固定板33带动升降杆19竖直向上移动,升降杆19带动第一横板12竖直向上移动,第一横板12带动连接板11竖直向上移动,连接板11带动齿条10竖直向上移动,齿条10带动第一齿轮9转动,第一齿轮9带动第一转杆2转动,第一转杆2带动转板7转动,转板7带动第一固定柱8转动,第一固定柱8带动箱门6转动并横向移动,直至两个箱门6相互远离并完全打开,启动电动推杆25,电动推杆25的活塞杆带动第二转轴29横向移动,第二转轴29带动第四齿轮32横向移动并与第二齿轮22和第三齿轮31解除啮合状态,此时无人机18位于自动升降收放箱1的外部,启动无人机18,无人机18带动电缆26竖直上升,直至无人机18到达指定高度时,关闭正反转电机24,无人机18保持在该高度执行任务,在任务执行完成后,使无人机18竖直下降,启动正反转电机24,使正反转电机24反转,并启动电动推杆25,电动
推杆25的活塞杆带动第二转轴29横向移动,第二转轴29带动第四齿轮32横向移动并与第二齿轮22和第三齿轮31重新啮合,正反转电机24的输出轴最终带动电缆26反转重新绕在卷筒27上,无人机18下降至第二横板16上,无人机18的冲击力带动第二横板16竖直下降,第二横板16带动第二套筒14竖直向下移动,第二套筒14挤压弹簧35,第二套筒14与摩擦垫34相互摩擦以减小冲击力,用来保护无人机18,并且正反转电机24的输出轴带动升降杆19竖直向下移动,升降杆19最终带动连接板11竖直向下移动,连接板11带动第一齿轮9反向转动,第一齿轮9带动转板7转动,转板7拉动两个箱门6相互靠近,并完成无人机18的收回。
[0050]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips