
 商标分类
商标分类  商标转让
商标转让 
一种可连续变形的机翼及飞行器的制作方法
 2021-02-13 10:02:33|
2021-02-13 10:02:33| 272|
272| 起点商标网
起点商标网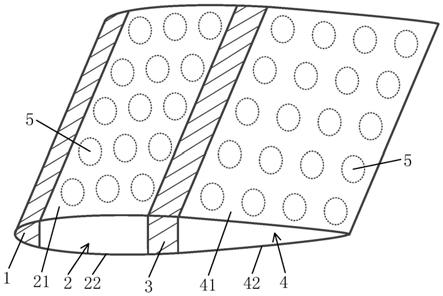
[0001]
本发明涉及航空航天技术领域,尤其是一种可连续变形的机翼及飞行器。
背景技术:
[0002]
作为飞机升力来源的最主要部件,机翼的形状直接关系着飞机飞行的性能。从风筝到莱特兄弟研发的第一架有动力且可操控的飞机,工程师借助鸟类飞行的灵感研发了很多飞行器。研究发现,鸟类在飞行过程中会连续调整它们翅膀的形状和大小来适应不同的飞行任务,从而通过翅膀变形对空气动力学性能的影响来获取更优的飞行性能。对比现代飞机与鸟类,设计师们尽可能的使机翼设计靠近鸟类翅膀,从而获取像鸟类翅膀一样优越的空气动力学性能,这样诞生了飞机襟翼、副翼、缝翼、扰流板等一系列可以活动的操纵面及附属装置。这些活动部件使得飞机机翼在外形和尺寸上有所变化,相应地改变飞行过程中空气动力学所带来的影响。然而,诸如缝翼、襟翼这些机械铰接式的操纵面多局限于在起飞和着陆时有效,而在其他飞行任务下并不能提供更好的飞行效率选择。此外,操纵面结构笨重所增加的额外重量会使得飞机耗油量增加。操纵面变形时同机翼外形的不连续性,以及操纵面与机翼之间的缝隙都会增加飞行阻力和噪声。
[0003]
近些年来,科学家们一直在致力于研究机翼大幅度变形的实现方法,以通过机翼大幅度变形来适应不同的飞行任务。然而,随着对更高巡航速度和更大负载的需求增加,现代飞机更需要刚性结构的设计来保证飞机的稳定性和可靠性。飞机机翼刚度的增加所带来的负面效应就是机翼很难通过变形来适应不同的飞行任务,从而只能在某一设计的飞行任务下有较好的飞行性能,在其他飞行任务下始终处于一种次优的飞行状况。因此,研发出无缝连续变形的机翼是解决以上问题的关键。
[0004]
现阶段的研究主要集中在用智能变形材料代替传统操纵面,或者取代整个机翼后缘,这些设计的缺点是,前者无法解决操纵面与机翼之间缝隙产生的阻力和噪音问题,而后者所采用的材料变形响应速度慢(如形状记忆合金)或者无法承受很大的空气载荷(如橡胶弹性柔性蒙皮和复合材料双稳态板壳)。其中,由于双稳态板壳能够实现两种形态的切换,且不需要能量来维持两种形态,被认为在变形机翼设计中有很大的应用前景。但是,目前的双稳态板壳由于材料和制备方式的限制,仅存在两个形态的切换,无法实现连续变形,且所能承受的空气载荷较小,目前为止还无法应用于高速、高载荷的民用飞机上。
技术实现要素:
[0005]
本发明的目的是提供一种可连续变形的机翼及飞行器,以解决现有机翼无法连续变形的问题。
[0006]
为达到上述目的,本发明提出一种可连续变形的机翼,其包括依次连接的非变形前主体、可变形的前缘部分、非变形后主体和可变形的后缘部分,所述前缘部分和所述后缘部分均具有上蒙皮和下蒙皮,所述前缘部分和所述后缘部分的上蒙皮和下蒙皮均为具有多个双稳态区域的多稳态蒙皮,所述双稳态区域能保持两种不同的稳定形态,所述多稳态蒙
皮的多个双稳态区域的多种形态组合,使所述多稳态蒙皮能保持多种形状,所述前缘部分的多稳态蒙皮和所述后缘部分的多稳态蒙皮的多种形状组合,使所述机翼能保持多种翼型,通过控制所述多稳态蒙皮的各个双稳态区域的形态转换,使所述多稳态蒙皮的形状在多种形状之间连续变换,通过控制各个所述多稳态蒙皮的形状变换,使所述机翼的翼型在多种翼型之间连续变换。
[0007]
本发明还提出一种飞行器,其包括上述的可连续变形的机翼。
[0008]
本发明的可连续变形的机翼及飞行器的特点和优点是:
[0009]
1、本发明的可连续变形的机翼及飞行器,使用多稳态金属蒙皮制作可变形的前缘部分和后缘部分,通过控制多稳态蒙皮的各个双稳态区域的形态转换,使机翼的翼型在多种翼型之间连续变换,由于机翼的变形通过多个双稳态区域的变形实现,不同于传统襟翼等操纵面在工作时导致机翼外形不连续的突变,本发明的机翼在变形过程中呈现缓慢循序的连续变形,能获得更优的空气动力学性能,适应多种不同的飞行条件,能提高飞机的飞行性能;
[0010]
2、本发明的可连续变形的机翼及飞行器,非变形前主体、前缘部分、非变形后主体和后缘部分依次连接所形成的机翼的表面为没有缝隙的光滑连续的表面,因此,当机翼保持任何一种翼型时,都能保证整个机翼表面的光滑和连续性,整个机翼表面没有任何缝隙,在提升飞行性能上具有很高的优越性,能实现无缝、光滑、连续的变形方式,降低了因操纵面与机翼之间缝隙导致的额外空气阻力和噪音,从而降低油耗,降低噪音污染和排放污染;
[0011]
3、本发明的可连续变形的机翼及飞行器,机翼的后缘部分可以实现展向扭转变形,从而能为飞机提供滚转力矩,在提升飞机飞行性能的同时也保证了飞机的可操纵性。
附图说明
[0012]
以下附图仅旨在于对本发明做示意性说明和解释,并不限定本发明的范围。其中:
[0013]
图1是本发明的可连续变形的机翼的一个实施例的示意图;
[0014]
图2是本发明所使用的多稳态蒙皮的双稳态区域处于上凸形态的示意图;
[0015]
图3是本发明所使用的多稳态蒙皮的双稳态区域处于下凹形态的示意图;
[0016]
图4是本发明中非变形前主体、可变形的前缘部分和非变形后主体的一种连接方式的示意图;
[0017]
图5是本发明中非变形后主体和可变形的后缘部分的一种连接方式的示意图;
[0018]
图6是本发明中非变形后主体和可变形的后缘部分的另一种连接方式的示意图;
[0019]
图7是本发明的可连续变形的机翼呈现后缘部分单独向下偏转的翼型;
[0020]
图8是本发明的可连续变形的机翼呈现后缘部分单独向上偏转的翼型;
[0021]
图9是本发明的可连续变形的机翼呈现前缘部分单独向下偏转的翼型;
[0022]
图10是本发明的可连续变形的机翼呈现前缘部分单独向上偏转的翼型;
[0023]
图11是本发明的可连续变形的机翼呈现前缘部分和后缘部分同时向下偏转的翼型;
[0024]
图12是本发明的可连续变形的机翼呈现后缘部分在展向扭转的翼型。
[0025]
主要元件标号说明:
[0026]
1、非变形前主体;
[0027]
2、前缘部分;
[0028]
21、第一上蒙皮;22、第一下蒙皮;
[0029]
3、非变形后主体;
[0030]
31、第一导槽;32、第二导槽;
[0031]
4、后缘部分;
[0032]
41、第二上蒙皮;42、第二下蒙皮;43、后缘尖端;44、尖端连接体;
[0033]
5、双稳态区域;
[0034]
6、未处理区域。
具体实施方式
[0035]
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图说明本发明的具体实施方式。在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0036]
如图1所示,本发明提供一种可连续变形的机翼,其包括由前至后依次连接的非变形前主体1、可变形的前缘部分2、非变形后主体3和可变形的后缘部分4,前缘部分2和后缘部分4均具有上蒙皮和下蒙皮,前缘部分2和后缘部分4的上蒙皮和下蒙皮均为具有多个双稳态区域5的多稳态蒙皮,也就是图1中显示的前缘部分2的第一上蒙皮21和第一下蒙皮22、以及后缘部分4的第二上蒙皮41和第二下蒙皮42,每个双稳态区域5能保持两种不同的稳定形态,且不需要能量来维持这两种稳定形态,由于多稳态蒙皮具有多个双稳态区域5,而每个双稳态区域5能保持两种稳定形态,因此多稳态蒙皮的多个双稳态区域5具有多种形态组合,多种形态组合至少包括:全部双稳态区域5均保持第一种稳定形态的形态组合;全部双稳态区域5均保持第二种稳定形态的形态组合;一部分双稳态区域5均保持第一种稳定形态、另一部分双稳态区域5均保持第二种稳定形态的形态组合;
[0037]
多稳态蒙皮的多个双稳态区域5的多种形态组合,使多稳态蒙皮能呈现并保持多种形状,前缘部分2的多稳态蒙皮和后缘部分4的多稳态蒙皮的多种形状组合,使机翼能呈现并保持多种翼型,通过控制多稳态蒙皮的各个双稳态区域5的形态转换,使多稳态蒙皮的形状在多种形状之间连续变换(切换),通过控制各个多稳态蒙皮的形状变换,使机翼的翼型在多种翼型之间连续变换(切换)。
[0038]
本发明抛弃了传统襟翼等操纵面,利用可变形的前缘部分2和后缘部分4来实现各种操纵面的功能,通过采用多稳态蒙皮,使机翼的前缘部分2和后缘部分4既能单独变形,又能同时变形,从而具有多种形状组合,使机翼能在多种翼型之间连续变换,从而适应多种飞行条件;
[0039]
另外,由于机翼的变形通过多个双稳态区域5的变形实现,不同于传统襟翼等操纵面在工作时导致机翼外形不连续的突变,本发明的机翼在变形过程中呈现缓慢循序的连续
变形,整个机翼表面没有突变;
[0040]
此外,由于机翼的非变形前主体1和非变形后主体3不发生变形,机翼整体结构稳定可靠,同时能为前缘部分2和后缘部分4提供支撑,加固机翼的整体结构,使得机翼可以承受较大的空气载荷。
[0041]
具体是,前缘部分2为中空结构,前缘部分2的第一上蒙皮21和第一下蒙皮22上下间隔设置,第一上蒙皮21的前边缘与非变形前主体1的上表面相接,第一上蒙皮21的后边缘与非变形后主体3的上表面相接,第一下蒙皮22的前边缘与非变形前主体1的下表面相接,第一下蒙皮22的后边缘与非变形后主体3的下表面相接;
[0042]
后缘部分4为中空结构,后缘部分4的第一上蒙皮41位于第一下蒙皮42上方,第一上蒙皮41的前边缘与非变形后主体3的上表面相接,第一下蒙皮42的前边缘与非变形后主体3的下表面相接,第一上蒙皮41的后边缘与第一下蒙皮42的后边缘相接形成后缘尖端。
[0043]
如图1所示,在一个实施例中,非变形前主体1、前缘部分2、非变形后主体3和后缘部分4依次连接所形成的机翼的表面为没有缝隙的光滑连续的表面,因此,本实施例的可连续变形的机翼也可称为可连续无缝变形的机翼,整个机翼表面光滑连续。
[0044]
本实施例中,当机翼保持任何一种翼型时,都能保证整个机翼表面的光滑和连续性,整个机翼表面没有任何缝隙,在提升飞行性能上具有很高的优越性,能实现无缝、光滑、连续的变形方式,降低了由襟翼等操纵面带来的额外空气阻力和噪音,从而降低油耗,降低噪音污染和排放污染。
[0045]
如图2、图3所示,在一个实施例中,双稳态区域5的两种稳定形态为上凸(如图2所示)和下凹(如图3所示),多稳态蒙皮的多种形状通过多个双稳态区域5上凸或下凹的不同组合实现。双稳态区域5的原始形态为上凸和下凹中的一种形态(如图1所示)。
[0046]
如图2、图3所示,具体实施时,双稳态区域5是采用表面机械研磨处理技术(surface mechanical attrition treatment,smat)对金属蒙皮的局部区域的正反两面进行处理得到,通过表面机械研磨处理技术的处理使双稳态区域5具有纳米晶体表面层,从而使双稳态区域5的金属表面层晶粒细化,出现纳米晶,将双稳态区域5的强度提升的同时,向双稳态区域5引入可控的内应力,双稳态区域5(也可称为处理区域)中引入的内应力在与双稳态区域5相邻的未处理区域6的约束或限制下,使处理区域发生塑性变形,能呈现沿法向上凸和下凹两种稳定形态,这两种稳定形态在一定的触发力的作用下可以实现切换,比如,图2显示了双稳态区域5的初始形态为上凸,当施加方向向下的触发力f后,双稳态区域5的形态转换为下凹,也就是图3显示的双稳态区域5的下凹形态,切换后不再需要外力维持形态,切换时所需要的触发力可以通过调整加工引入应力的多少来控制,从而来适应对抗不同的外载荷。
[0047]
如图1所示,在一个实施例中,多稳态蒙皮的多个双稳态区域5按照预设排列方式排列(分布),通过在金属蒙皮上以不同的方式分布双稳态区域5,可以实现金属蒙皮的多种不同变形。
[0048]
具体是,在制作机翼前,根据要实现的变形目标对金属蒙皮的双稳态区域5的排列方式进行设计,再根据预设的排列方式,采用表面机械研磨处理技术对各个局部区域进行处理,得到具有按照预设排列方式排列的多个双稳态区域5的多稳态蒙皮,再将各个多稳态蒙皮与非变形前主体1和非变形后主体3连接,形成前缘部分2和后缘部分4。
[0049]
其中,预设排列方式可以是有序排列,也可以是无序排列。例如,预设排列方式可以是矩形阵列、梯形阵列或圆形阵列等有序排列方式,还可以是通过拓扑优化后的无序排列方式。
[0050]
如图1所示,例如,每个多稳态蒙皮上的多个双稳态区域5排列成m行n列的阵列,n≥1,m≥1,且m和n为正整数,依次调整各行的双稳态区域5至上凸或下凹的形式可实现翼型连续的变化。
[0051]
其中,双稳态区域5的形状为圆形、椭圆形或矩形,当然还可以是其它形状。
[0052]
其中,各个双稳态区域5的形态变换相互独立,互不干扰。理论上控制机翼上的任意一个双稳态区域5变换形态都会使机翼的外形参数发生变化,但是为了使机翼产生较大变形,通常对多个双稳态区域5同时进行凹凸控制。
[0053]
如图7至图12所示,在一个实施例中,机翼的多种翼型包括但不限于:前缘部分2单独在弦向向上偏转的翼型、前缘部分2单独在弦向向下偏转的翼型、后缘部分4单独在弦向向上偏转的翼型、后缘部分4单独在弦向向下偏转的翼型、前缘部分2和后缘部分4同时在弦向向上偏转的翼型、前缘部分2和后缘部分4同时在弦向向下偏转的翼型、以及后缘部分4在展向扭转的翼型。
[0054]
具体是,当前缘部分2的多稳态蒙皮的全部双稳态区域5处于原始形态,且后缘部分4的多稳态蒙皮的全部双稳态区域5上凸时,机翼呈现后缘部分4单独在弦向向下偏转至最大程度的翼型(如图7所示);当前缘部分2的多稳态蒙皮的全部双稳态区域5处于原始形态,且后缘部分4的多稳态蒙皮的全部双稳态区域5下凹时,机翼呈现后缘部分4单独在弦向向上偏转至最大程度的翼型(如图8所示);
[0055]
当后缘部分4的多稳态蒙皮的全部双稳态区域5处于原始形态,且前缘部分2的多稳态蒙皮的全部双稳态区域5上凸时,机翼呈现前缘部分2单独在弦向向下偏转至最大程度的翼型(如图9所示);当后缘部分4的多稳态蒙皮的全部双稳态区域5处于原始形态,且前缘部分2的多稳态蒙皮的全部双稳态区域5下凹时,机翼呈现前缘部分4单独在弦向向上偏转至最大程度的翼型(如图10所示);
[0056]
当前缘部分2和后缘部分4的多稳态蒙皮的全部双稳态区域5上凸时,机翼呈现前缘部分2和后缘部分4同时在弦向向下偏转至最大程度的翼型(如图11所示);当前缘部分2和后缘部分4的多稳态蒙皮的全部双稳态区域5下凹时,机翼呈现前缘部分2和后缘部分4同时在弦向向上偏转至最大程度的翼型;
[0057]
当后缘部分4的多稳态蒙皮的左端(右端)的双稳态区域5上凸,且右端(左端)的双稳态区域5下凹时,机翼呈现后缘部分4的一端向上偏转且另一端向下偏转的翼型,也就是后缘部分4在展向扭转的翼型(如图12所示),后缘部分4的这种扭转变形能为飞机提供滚转力矩,在提升飞机飞行性能的同时也保证了飞机的可操纵性。
[0058]
具体实施时,通常使上下正对的两个双稳态区域5处于同一种稳定形态。
[0059]
如图1、图4所示,在一个实施例中,前缘部分2的上蒙皮和下蒙皮分别为第一上蒙皮21和第一下蒙皮22,第一上蒙皮21和第一下蒙皮22上下间隔设置,第一上蒙皮21和第一下蒙皮22与初始翼型对应位置的弧度一致,第一上蒙皮21的前边缘和后边缘分别与非变形前主体1的顶端和非变形后主体3的顶端固定连接,第一下蒙皮22的前边缘与非变形前主体1的底端固定连接,第一下蒙皮22的后边缘能前后滑动地与非变形后主体3的底端滑动连
接,在前缘部分2变形的过程中,第一下蒙皮22通过前后滑动为前缘部分2提供变形的余度。本实施例中第一上蒙皮21和第一下蒙皮22与非变形前主体1和非变形后主体3的连接处为无缝连接。
[0060]
具体实施时,固定连接所采用的连接方式可以是焊接、铆接或螺栓连接。滑动连接所采用的连接方式为:非变形后主体3的底端朝向前缘部分2的一侧设有第一导槽31,第一导槽31的槽口朝向前缘部分2,第一下蒙皮22的后边缘插入第一导槽31内,并能沿第一导槽31前后滑动,在前缘部分2变形的过程中,第一下蒙皮22通过沿第一导槽31前后滑动,来为前缘部分2提供变形的余度。
[0061]
但本发明并不以此为限,在另一个实施例中,第一下蒙皮22的前边缘与非变形前主体1的底端滑动连接,第一下蒙皮22的后边缘与非变形后主体3固定连接,同样能为前缘部分2提供变形的余度,具体的滑动连接方式可以是设置与上一个实施例的第一导槽31类似的导槽,本实施例中第一上蒙皮21的连接方式与上一个实施例相同,固定连接的方式也可以是焊接、铆接或螺栓连接,第一上蒙皮21和第一下蒙皮22与非变形前主体1和非变形后主体3的连接处也是无缝连接。
[0062]
如图1、图5所示,在一个实施例中,后缘部分4的上蒙皮和下蒙皮分别为第二上蒙皮41和第二下蒙皮42,第二上蒙皮41的前边缘与非变形后主体3的顶端固定连接,第二下蒙皮42的前边缘能前后滑动地与非变形后主体3的底端滑动连接,在后缘部分4变形的过程中,第二下蒙皮42通过前后滑动为后缘部分4提供变形的余度,第二上蒙皮41的后边缘和第二下蒙皮42的后边缘固定连接形成后缘尖端43。本实施例中第二上蒙皮41和第二下蒙皮42与非变形后主体3的连接处为无缝连接。
[0063]
具体实施时,固定连接所采用的连接方式可以是焊接、铆接或螺栓连接。滑动连接所采用的连接方式为:非变形后主体3的底端朝向后缘部分4的一侧设有第二导槽32,第二导槽32的槽口朝向后缘部分4,第二下蒙皮42的前边缘插入第二导槽32内,并能沿第二导槽32前后滑动,在后缘部分4变形的过程中,第二下蒙皮42通过沿第二导槽32前后滑动,来为后缘部分4提供变形的余度。
[0064]
但本发明并不以此为限,如图6所示,在另一个实施例中,第二上蒙皮41的前边缘与非变形后主体3的顶端固定连接,第二下蒙皮42的前边缘与非变形后主体3的底端固定连接,第二上蒙皮41的后边缘和第二下蒙皮42的后边缘通过尖端连接体44连接形成后缘尖端,尖端连接体44呈尖角状,尖端连接体44由刚度良好的金属或复合材料制成,第二上蒙皮41的后边缘与尖端连接体44固定连接,第二下蒙皮42的后边缘能前后滑动地与尖端连接体44滑动连接,在后缘部分4变形的过程中,第二下蒙皮42通过沿尖端连接体44的底面前后滑动,来为后缘部分4提供变形的余度,例如,第二下蒙皮42的后边缘与尖端连接体44的滑动连接方式为:尖端连接体44的底面上设有与上一个实施例的第二导槽32类似的导槽,以使第二下蒙皮42的后边缘沿着导槽前后滑动。本实施例中,固定连接的方式可以是焊接、铆接或螺栓连接,第二上蒙皮41和第二下蒙皮42与非变形后主体3的连接处也为无缝连接。
[0065]
在前面通过设置导槽来实现滑动连接的方案中,导槽的开口高度比蒙皮的厚度大0.5mm~2mm,以在导槽内为蒙皮提供运动空间。
[0066]
在一个实施例中,后缘部分4在弦向的长度占机翼的整体弦长的30%~50%,例如为40%,前缘部分2在弦向的长度占机翼的整体弦长的20%~50%,例如为30%或40%。
[0067]
在一个实施例中,前缘部分2在展向的长度占机翼展长的100%,也就是前缘部分2在展向的长度等于机翼的整体展长,这样可以使机翼发生整体式变形,整体式变形相较于传统机翼的分段式操纵面不存在缝隙,从而可以减少操纵面变形时缝隙产生的阻力和噪声;后缘部分4在展向的长度占机翼展长的100%,也就是后缘部分4在展向的长度等于机翼的整体展长,这样可以使机翼发生整体式变形,整体式变形相较于传统机翼的分段式操纵面不存在缝隙,从而可以减少操纵面变形时缝隙产生的阻力和噪声。
[0068]
在一个实施例中,多稳态蒙皮的材质为铝合金、不锈钢、钛合金或镁合金,但本发明并不以此为限,多稳态蒙皮的材质还可以是其它航空用蒙皮材料。
[0069]
在一个实施例中,多稳态蒙皮由厚度为0.1mm~5mm的金属板壳制成。
[0070]
在一个实施例中,非变形前主体1为实心结构或内部有支撑的镂空或中空结构,非变形后主体3为实心结构或内部有支撑的镂空或中空结构,非变形前主体1和非变形后主体3的材质为铝合金、不锈钢、钛合金和镁合金。其中非变形前主体1和非变形后主体3内部的支撑可以是支架或其它支撑结构。
[0071]
例如,非变形前主体1和非变形后主体3在展向方向上呈柱状,非变形前主体1在弦向方向的断面呈弓形,非变形前主体1的弧形面背向前缘部分2,非变形前主体1的平面面向前缘部分2,并与前缘部分2的两个多稳态蒙皮相接,非变形后主体3在弦向方向的断面大致呈矩形,非变形后主体3的前侧面面向前缘部分2,并与前缘部分2的两个多稳态蒙皮相接,非变形后主体3的后侧面面向后缘部分4,并与后缘部分4的两个多稳态蒙皮相接。
[0072]
在一个实施例中,双稳态区域5的变形通过驱动装置驱动实现,驱动装置设于前缘部分2的第一上蒙皮21与第一下蒙皮22之间、以及后缘部分4的第二上蒙皮41与第二下蒙皮4之间。例如,驱动装置为机械驱动装置,比如,凸轮机构或液压驱动机构,凸轮机构由电机驱动。但本发明并不以此为限,驱动装置还可以是其它类型的驱动装置,比如压电驱动装置或形状记忆合金驱动装置,只要能驱动形态转换即可。
[0073]
具体实施时,前缘部分2的两个多稳态蒙皮之间具有空间,后缘部分4的两个多稳态蒙皮之间也具有空间,在前缘部分2和后缘部分4内部的空间中安装体积较小的机械驱动装置,通过机械驱动装置对双稳态区域5施加推力或拉力,以使双稳态区域5在两种稳定形态之间切换,同时,机械驱动装置在驱动双稳态区域5切换形态后还可以提供支撑力,进一步加固了机翼的整体结构,使得机翼可以承受更大的空气载荷,该驱动方式可以实现快速响应,降低机翼变形时的迟滞效应。
[0074]
本发明通过使用多稳态金属蒙皮制作可变形前缘部分2和后缘部分4,使机翼具备多种翼型相互切换的能力,并且在变形过程中不会出现缝隙和表面突变的情况,表面具有良好的光滑性和连续性,本发明的机翼不仅比现有的机翼质量减轻,更重要的是可以通过改变自身的形状来适应不同的飞行条件,获得更优的空气动力学性能,从而提高了飞机的飞行性能,降低了燃油消耗率和污染物的排放量。同时,机翼在变形过程中始终维持光滑无缝的状态,因此可以减少飞行阻力,降低噪声污染。
[0075]
本发明还提出一种飞行器,其包括上述的可连续变形的机翼。本发明的飞行器包括但不限于飞机。
[0076]
以上所述仅为本发明示意性的具体实施方式,并非用以限定本发明的范围。任何本领域的技术人员,在不脱离本发明的构思和原则的前提下所作的等同变化与修改,均应
属于本发明保护的范围。而且需要说明的是,本发明的各组成部分并不仅限于上述整体应用,本发明的说明书中描述的各技术特征可以根据实际需要选择一项单独采用或选择多项组合起来使用,因此,本发明理所当然地涵盖了与本案发明点有关的其它组合及具体应用。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 飞机蒙皮

 热门咨询
热门咨询




tips