
 商标分类
商标分类  商标转让
商标转让 
高速无人机等航空器的制作方法
 2021-02-13 10:02:50|
2021-02-13 10:02:50| 304|
304| 起点商标网
起点商标网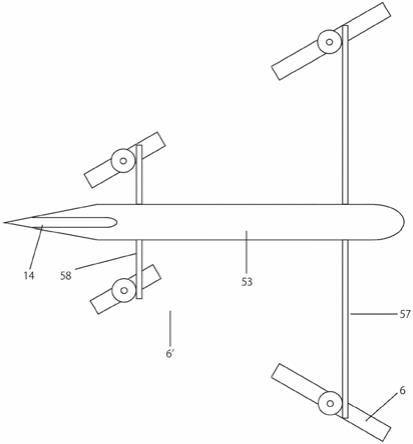
[0001]
本发明涉及能够垂直起降且能够高速地水平飞行的新型无人机等航空器。
背景技术:
[0002]
通常的飞机在滑行道上滑行直到成为飞机能够起飞的速度。另外,相反地在着陆的情况下,在从着陆到停止期间滑行,所以也需要滑行道。一般的距离需要1.5km至3km左右。因此,需要vtol(垂直起降机)。
[0003]
作为这种飞机,已知直升飞机、鱼鹰飞机(osprey)、无人机等。如图1所示,直升飞机对于悬停、上升、下降、水平飞行中的每一个动作使用一个螺旋桨。在图1中,附图标记1是机体,附图标记3是尾旋翼,附图标记32是螺旋桨旋转用电机。
[0004]
由于直升飞机的水平速度较慢,所以开发了水平速度较快的鱼鹰飞机(图2)。鱼鹰飞机是本发明人在1953年发明的,并将其教授给贝尔飞机(bell aircraft)公司的ceo劳伦斯
·
贝尔,贝尔飞机公司近年来终于将其实用化。
[0005]
在主翼的两端具有能够进行倾转控制的螺旋桨,通过控制该螺旋桨的倾转角,从而能够实现悬停功能、水平飞行。为了进行上升和前进动作,使螺旋桨的倾转角从0度到90度变化。但是,在使旋翼成为水平、垂直的转换时会发生较多事故。
[0006]
在图2中,附图标记1是机体,附图标记34是鱼鹰飞机上升、下降、前进用螺旋桨,附图标记4是水平尾翼,附图标记5是鱼鹰飞机发动机用旋转轴,附图标记33是鱼鹰飞机螺旋桨用发动机,近年来终于变得流行。
[0007]
图3是公知的无人机,这也是本发明人在1940年发明的,近年来终于变得流行。在图3中,附图标记6是无人机螺旋桨,附图标记7是无人机上升、下降用电机,附图标记8是无人机螺旋桨保护件,附图标记9是接收装置、相机等。
技术实现要素:
[0008]
发明要解决的课题
[0009]
如上所述,在没有滑行道的场所,飞机不能起降。通常的飞机有如下缺点:没有垂直起降、悬停功能。为了解决这种问题,考虑具有垂直起降、悬停功能的飞行体。直升飞机是具有垂直起降、悬停功能的飞行体,在海难事故、山里的遇难事故等中,在人命救援中发挥作用。但是,由于水平飞行速度慢,另外,续航距离也较短,装载货物量也较少,所以要求代替直升飞机的飞行体。
[0010]
在鱼鹰型的飞机的情况下,在垂直起降时螺旋桨的风击打翼,空气动力上来说是低效率的。
[0011]
另外,如图3的无人机是公知的,但由于无人机的水平飞行速度慢,不能长距离飞行,会由于侧风而倾覆而非全天候型,所以虽然亚马逊公司等正在计划,但作为货物配送、急速运输是不适合的。
[0012]
用于解决课题的手段
[0013]
解决上述课题的本发明设置垂直上升下降用前进用螺旋桨和水平飞行用稳定翼而构成。它是与不能垂直上升下降的自动旋翼飞机不同的装置。
[0014]
发明的效果
[0015]
根据本发明,能够提供能以较高的能量效率高速且可靠地远距离配送邮购的商品运输的垂直起降型高速长距离安全飞机,其水平速度快,以较少的能量远距离飞行,载货量也变多,为全天候型,具有安全且稳定的垂直起降、悬停功能,在起飞上升时没有螺旋桨风击打翼的翼力损失,也不需要倾转旋翼,控制构造变简单,另外,事故也消失,制造容易且低成本,是产生产业上时间节约和各种效果的划时代发明。
附图说明
[0016]
图1是公知的直升飞机的侧视图。
[0017]
图2是公知的倾转旋翼型(鱼鹰飞机)的侧视图。
[0018]
图3是公知的无人机的俯视图。
[0019]
图4是示出作为本发明的无人机的实施例的俯视图。
[0020]
图5是本发明的第二实施例的无尾翼无人机的俯视图。
[0021]
图6是本发明的第三实施例的鸭式翼(日文:先尾翼)型的俯视图。
[0022]
图7是本发明第四实施例的串型机的俯视图。
[0023]
图8是本发明第五实施例的俯视图。
[0024]
图9是本发明第六实施例的太阳能飞机的图。
[0025]
图10是本发明第七实施例的图。
[0026]
图11是本发明第八实施例的双引擎型的图。
[0027]
图12是本发明的第九实施例(实机)侧视图。
[0028]
图13是在本发明的第十实施例中使翼成为水平而成的俯视图。
[0029]
图14是同上的正面侧视图。
[0030]
图15是同上的侧面侧视图。
[0031]
图16是在本发明的第十实施例中使翼成为垂直而成的俯视图。
[0032]
图17是同上的正面侧视图。
[0033]
图18是同上的侧面侧视图。
[0034]
图19是同上的将翼旋转电机设为一个而成的驱动机构侧视图。
[0035]
图20是使利用锥齿轮的本发明的翼旋转的本发明概念图。
[0036]
图21是后螺旋桨不会受到前螺旋桨的后续的影响的本发明实施例的上升下降时的图。
[0037]
图22是同上的水平飞机的图。
[0038]
图23是单倾转主旋翼式的本发明实施例的侧视图。
[0039]
图24是同上的俯视图。
具体实施方式
[0040]
本发明是鉴于这样的课题而做出的新发明航空器,其目的在于提供新垂直起降型飞机(新vtol),其设置有上升下降用螺旋桨、前进用螺旋桨及旋转或不旋转的水平飞行用
翼并当然能够垂直起降或悬停,而且水平飞行速度快,能量损失少,能长距离飞行,为全天候型,即使是恶劣天气也能够进行稳定的飞行。
[0041]
应关注本发明是与以往的无人机、直升飞机、鱼鹰飞机、自动旋翼飞机均不同的构思。
[0042]
图4是本发明的航空器的第一实施例的俯视图。在附图中,附图标记13是水平尾翼,附图标记14是垂直尾翼,附图标记10是前进用螺旋桨。附图标记12是水平飞行用主翼,由上升用螺旋桨保护件8和主翼梁15支撑。附图标记6是上升、下降用悬停用螺旋桨。
[0043]
在螺旋桨保护件8的左右设置有一对上述主翼12和主翼梁15。
[0044]
附图标记14是设置在螺旋桨保护件8的后部的水平尾翼,附图标记13是由螺旋桨保护件8支撑的转向用垂直尾翼。附图标记7是使悬停用螺旋桨6旋转的电机。附图标记9是拍摄用相机和电子电路、电池等。
[0045]
本发明航空器是不妨碍上升螺旋桨地设置主翼12、尾翼13、前进螺旋桨10,能够使水平飞行速度高速化,利用螺旋桨保护件8构造上支撑前进螺旋桨10、旋转电机11、主翼12、尾翼13、14并共用的本发明第一实施例。
[0046]
图5是本发明第二实施例的无尾翼无人机的俯视图。是设置有翼梁15、主翼20、升降舵16、翼端垂直方向臂17并在后方设置有推动螺旋桨(日文:
プッシュプロペラ
)18及驱动电机19的本发明第二实施例的俯视图。本发明的主旨如用图4说明的那样。
[0047]
图6是本发明鸭式翼型实施例,由用螺旋桨保护件13支撑的鸭式翼梁22、用螺旋桨保护件8支撑的鸭式翼21、螺旋桨用电机11、拉动螺旋桨(日文:
プルプロペラ
)10、用螺旋桨保护件8支撑的主翼梁35、主翼31、用螺旋桨保护件8支撑的推动式螺旋桨18的驱动电机19、主翼翼端的垂直尾翼30构成。
[0048]
图7是本发明第四实施例,是不设置螺旋桨保护件13且使两个主翼36、37兼用作螺旋桨保护件的发明,是将前翼36和后翼37设为相同的大小的串型的串型航空器。即,是在两翼之间设置上升下降的螺旋桨6和电机7,且主翼36、37保护螺旋桨6的旋转的发明。附图标记38是设置在翼外的上升下降螺旋桨电机7的支撑梁。当然,即使增减螺旋桨的数量,也包含在本发明中。
[0049]
图8是本发明第五实施例,使上下用螺旋桨的四个旋转轨迹39全部内接,不设置螺旋桨保护件而使四片主翼24、鸭式翼28及尾翼29兼用作螺旋桨保护件。附图标记40是将四个螺旋桨电机7结合的梁。
[0050]
图9是本发明的第六实施例,在四边形框架41安装有螺旋桨电机7、主翼42,虽然与图8相同,但是其是将四块主翼设为太阳能板42而成的实施例,也能够利用太阳能恒久地飞行,能够在地上利用微波运输能量。
[0051]
图10是本发明第七实施例,是在主翼43、44的外侧设置上下用螺旋桨6和电机7,并使主翼构造简化而成的实施例。
[0052]
如图4、图5、图6、图7、图8、图9、图10所示构成的飞机航空器的动作的说明如以下那样。
[0053]
在该情况下,首先,当控制者利用遥控器将开关1(未图示)接通时,通过无线使无人机的上升用电机7、上升用螺旋桨6开始旋转,机体上升到规定的高度。接着,当控制者利用遥控器将开关2(未图示)接通时,利用电机11、19的旋转力使前进用螺旋桨7和推动螺旋
桨18旋转。
[0054]
机体开始前进,浮力由图4的主翼12和尾翼13、图5的20、图6的21和31、图7的36和37、图8的24、28、图9的42、图10的43、44分担,在该期间,使上升用螺旋桨6、电机9空转。而且,由于比公知的无人机高速地到达目的地,所以在产品销售或远程拍摄方面比公知的无人机优异。
[0055]
接着,说明着陆时的动作。在着陆时,控制者增加上下用螺旋桨6全部的旋转,并使前进用螺旋桨10的旋转停止。在该状态下一边控制上下用螺旋桨6的旋转,一边着地。
[0056]
根据本发明,着地时不需要螺旋桨的倾转角控制(参照图1的控制)、无人机的多片水平螺旋桨的转速的控制变更的电路或指令,构造变得简单,成本降低,操作变得简单,能够安全可靠地进行着陆动作。不仅如此,由于水平用使用固定翼,所以能够高速飞行。另外,由于能够用螺旋桨保护件兼用作翼,所以构造简单且能够轻量化。
[0057]
图12是双引擎的本申请的发明的第九实施例的俯视图。水平飞行具备双引擎的螺旋桨10,能够高速飞行且能够长距离移动。设置有四个垂直上升下降用的螺旋桨6。附图标记21是设置在发动机11间的梁,附图标记53是将发动机11与机构部54间连接的梁,附图标记55是将机构部54间连接的梁。如图12所示,本发明也能够作为乘载许多人的航空器使用。
[0058]
以上是无人机,图11是本发明第八实施例,是供人乘坐的实机并示出其侧视图,设置有前进发动机46、其螺旋桨47,在重心位置的机体1设置有上升下降兼用发动机25和旋翼48。附图标记51是垂直尾翼,附图标记50是水平尾翼,附图标记26是驾驶席。在后部设置喷气发动机或火箭发动机27来代替前进用螺旋桨47和发动机46的情况也包含在本发明中。另外,将上升下降用旋翼48及其发动机32设置于翼端8的情况当然也包含在本发明中。为了慎重起见,存在称为自动旋翼飞机的航空器,但其没有上升下降发动机,与本发明完全不同。
[0059]
图13、14、15、16、17、18是本发明的第十实施例。
[0060]
该实施例与到第九实施例为止根本性地不同。
[0061]
具体而言,到第九实施例为止,将翼固定且独立设置前进用螺旋桨,但第十实施例使翼旋转,且不设置前进用螺旋桨。
[0062]
到第九实施例为止,为了使上升下降用的螺旋桨的后流不紊乱,在螺旋桨后流部分不配置翼。而且将翼固定。另外,独立设置有前进用螺旋桨和上升下降用螺旋桨。本第十实施例是与第九实施例为止完全不同的概念的实施例,是使本发明更高效化的实施例。
[0063]
具体而言,为了使构造合理化,在翼设置上升下降用螺旋桨,为了提高螺旋桨效率而不被翼搅乱螺旋桨的后流,与螺旋桨成直角地配置翼,如果螺旋桨的轴向变化,则伴随于此翼方向也旋转,从而螺旋桨后流与翼的面方向变得相同,螺旋桨后流始终不被翼搅乱。
[0064]
另外,为了不设置前进用螺旋桨而与上升下降用螺旋桨兼用,如上所述使翼旋转约90度,使螺旋桨的方向旋转约90度,并作为前进用螺旋桨。
[0065]
这会被误解为是否与鱼鹰飞机相同,但是其是与鱼鹰飞机根本不同的发明。鱼鹰飞机是将翼固定,并在翼的前端设置使方向旋转的发动机和螺旋桨,即使螺旋桨方向旋转,翼也不旋转的航空器,与此相对,本发明将带发动机的螺旋桨固定于翼,且翼不固定而与在螺旋桨方向旋转的翼一起旋转。
[0066]
这样,与鱼鹰飞机不同。而且,在鱼鹰飞机的情况下,螺旋桨的后流与翼碰撞,螺旋桨效率下降,与此相对,本发明中,由于螺旋桨与翼始终为直角且当螺旋桨倾斜时,翼以相
同的角度倾斜,所以螺旋桨后流不与翼碰撞,所以是螺旋桨后流格外提高的发明。
[0067]
另外,由于鱼鹰飞机的发动机和螺旋桨在翼端旋转,所以构造上会产生振动或强度等的故障,但本发明由于发动机和螺旋桨牢固地固定于翼,所以构造上不会产生故障。另外,由于鱼鹰飞机在翼的前端设置有旋转的发动机和螺旋桨,所以需要将翼梁设为结实,所以重量增加,空气动力性能下降。
[0068]
与此相对,本发明由于与鱼鹰飞机方式相比翼梁变轻,所以空气动力性能提高。由于鱼鹰飞机在翼端具有发动机和螺旋桨,所以会产生由较长的跨度导致的共振,振动较大,垂心保持性较差,最终发生由振动导致的坠落事故。
[0069]
与此相对,本发明由于发动机和螺旋桨不位于翼的前端,而是位于构造强的中央部,所以也不会产生共振,垂心保持性也良好。
[0070]
用图13以后的图说明此情况。
[0071]
图13是第十实施例的一例的俯视图。在机身53设置有使翼57旋转的电机55、使翼58旋转的电机56、驱动电机55、56的电池54、垂直尾翼14、前主翼57及后主翼58,在前主翼57搭载有螺旋桨用电机7、螺旋桨6,在后主翼58搭载有螺旋桨6'驱动用电机7'、螺旋桨6'。
[0072]
图14是从正面观察其得到的图。
[0073]
图15是从侧面观察其得到的图。
[0074]
附图标记59是起降装置兼货物保持部,在本航空器的cg68乘载有相机或货物60,设法使得能够与货物的各种重量无关地始终水平飞行。
[0075]
在此,重要的是,以翼57相对于螺旋桨6的推力线具有迎角α62的方式在前翼57安装有螺旋桨6用电机7。
[0076]
同样地,以后翼58也具有迎角β的方式安装有螺旋桨6'用电机7'。
[0077]
α和β当然是不同的角度。
[0078]
图16是利用电机55的旋转轴67和电机56的旋转轴70使前主翼57和后主翼58及搭载于它们的螺旋桨6、螺旋桨6用电机7、螺旋桨6'、螺旋桨6'用电机7'旋转90度得到的俯视图。
[0079]
图17是从正面观察其得到的图。
[0080]
图18是从侧面观察图16得到的图。
[0081]
在该状态下,本发明航空器利用电机7使螺旋桨6旋转,利用电机7'使螺旋桨6'旋转,垂直起飞上升。
[0082]
设法使得翼57、58不会完全遮挡此时的螺旋桨6、6'的后流。
[0083]
接着,使电机55和56逐渐旋转,使螺旋桨6和螺旋桨6'、翼57和翼58以旋转轴69、70为中心旋转,成为图18的位置。
[0084]
由此,利用翼57和58使机体浮动,用螺旋桨6和螺旋桨6'的推力高速水平飞行。如果需要,用相机60拍摄。
[0085]
当到达目的地时,使电机55和56与上述反向地旋转,使翼57、58、螺旋桨6、6'以旋转轴60、76为中心逐渐成为向上,并垂直下降。由于此时翼不也妨碍螺旋桨后流,所以螺旋桨效率上升。
[0086]
图19是不使用图13至图18的两个电机55、56而仅用一个电机55使翼57、58旋转的本发明实施例,由此,能够实现航空器的轻量化。
[0087]
电机优选步进电机。
[0088]
电机55的旋转力66利用杆61、枢轴62、连结梁63经由枢轴64、杆65成为旋转力67,使轴70旋转。
[0089]
图20是与图19不同的本发明实施例,利用锥齿轮68的非反转性使翼57、58旋转。
[0090]
图21、图22是本发明的其他实施例,在图16、17、18的实施例中,由于前螺旋桨6的后流,后螺旋桨6'的效率变差。因此,图21、图22是将其改善得到的本发明的其他实施例的图。在该实施例中,由于前螺旋桨6的后流在后螺旋桨6'的旋转范围外,所以后螺旋桨6'的效率也不下降。图21是上升或下降时的图,图22是水平飞行时的图。
[0091]
图23、图24也是本发明的其他实施例的图,由单倾转主旋翼69、转矩改正尾旋翼(日文:
トルク
是正
テイルロータ
)70、固定主翼57及固定尾翼58构成。
[0092]
本发明不仅应用于无人机,也应用于实机。另外,在该情况下,用发动机使螺旋桨旋转。另外,在使用喷气发动机或火箭而不是螺旋桨的情况也包含在本发明中。
[0093]
产业上的可利用性
[0094]
本发明是与公知的无人机、公知的鱼鹰飞机等倾转旋翼方式、直升飞机等其他垂直起降机相比安全且水平速度快的新型飞机,当前的无人机,对于邮购等长距离物品运输、物流来说,由于速度慢,不能长距离飞行,消耗较多能量,所以不适合高速运输,但在将本发明应用于无人机的情况下,能够高速运输物品,能够长距离拍摄,另外,在将本发明应用于载人的机体的情况下,在较远的场所在急速的山地救援、海难救援等中发挥作用,因此产业上有较大的利用可能性。
[0095]
另外,由于本发明的飞机与直升飞机相比不需要俯仰控制,所以不仅转向简单且低成本,而且水平速度快,续航距离也长,另外也不存在由于鱼鹰飞机的由倾转导致的事故所以安全,使用范围扩展。另外,如果增大其机体的大小,则能够乘载许多人,另外,能够到达没有机场的岛上,能够弥补岛上居民的交通的不便,防卫上、产业上的可利用性极大。
[0096]
另外,如果使本发明飞到平流层附近,使利用翼接收的太阳能成为微波运输到地上,在地上作为电能使用,则能够向无资源的我国供给珍贵的能量,另外,可代替侦查卫星。防卫上、产业上的可利用性极大。
[0097]
附图标记的说明
[0098]
1 机体
[0099]
2 主旋翼
[0100]
3 尾旋翼
[0101]
4 水平尾翼
[0102]
5 鱼鹰飞机发动机用旋转轴
[0103]
6 无人机螺旋桨
[0104]
6' 同上(后部)
[0105]
7 无人机上升下降电机
[0106]
7' 同上(后部)
[0107]
8 无人机螺旋桨保护件
[0108]
9 接收装置、相机等
[0109]
10 前进用螺旋桨
[0110]
11 前进用螺旋桨电机
[0111]
12 主翼
[0112]
13 水平尾翼
[0113]
14 垂直尾翼
[0114]
15 主翼梁
[0115]
16 升降用舵
[0116]
17 翼端垂直升降舵
[0117]
18 推动螺旋桨
[0118]
19 推动螺旋桨驱动电机
[0119]
20 无尾翼主翼
[0120]
21 鸭式翼
[0121]
22 鸭式翼梁
[0122]
23 鸭式翼型主翼
[0123]
24 螺旋桨保护件兼用主翼
[0124]
25 上升下降螺旋桨用发动机
[0125]
26 驾驶室
[0126]
27 喷气或火箭发动机
[0127]
28 螺旋桨6保护兼用鸭式翼
[0128]
29 螺旋桨6保护兼用尾翼
[0129]
30 翼端垂直尾翼
[0130]
31 鸭式翼型主翼
[0131]
32 螺旋桨旋转用电机
[0132]
33 鱼鹰飞机螺旋桨用发动机
[0133]
34 鱼鹰飞机上升、下降、前进用螺旋桨
[0134]
35 鸭式翼型的主翼梁
[0135]
36 螺旋桨6保护兼用串型主翼前翼
[0136]
37 螺旋桨6保护兼用串型主翼后翼
[0137]
38 设置于串型机的上下用螺旋桨电机支撑梁
[0138]
39 上下用螺旋桨旋转轨迹
[0139]
40 将四个上下用螺旋桨电机7结合的梁
[0140]
41 将四个螺旋桨电机7结合的四边形的梁
[0141]
42 太阳能板
[0142]
43 串型主翼(带翼端螺旋桨)前翼
[0143]
44 串型主翼(带翼端螺旋桨)后翼
[0144]
45 机身梁
[0145]
46 实机前进螺旋桨发动机
[0146]
47 实机前进螺旋桨
[0147]
48 实机上升下降专用旋翼
[0148]
49 实机水平飞行专用主翼
[0149]
50 实机水平飞行专用水平尾翼
[0150]
51 实机水平飞行专用垂直尾翼
[0151]
52 实机上升下降专用旋翼用发动机
[0152]
53 机身
[0153]
54 电池、电子电路等
[0154]
55 前翼旋转电机(步进电机)
[0155]
56 后翼旋转电机(步进电机)
[0156]
57 前翼
[0157]
58 后翼
[0158]
59 货物搭载兼起降装置
[0159]
60 货物
[0160]
61 电机55的旋转传导杆
[0161]
62 电机55的枢轴
[0162]
63 电机55的后翼旋转连结梁
[0163]
64 电机55的枢轴
[0164]
65 电机55的杆
[0165]
66 前翼旋转电机旋转方向
[0166]
67 后翼旋转电机旋转方向
[0167]
68 翼旋转锥齿轮
[0168]
69 倾转主旋翼
[0169]
70 转矩改正尾旋翼
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips