
 商标分类
商标分类  商标转让
商标转让 
一种自动飞行器的制作方法
 2021-02-13 02:02:34|
2021-02-13 02:02:34| 272|
272| 起点商标网
起点商标网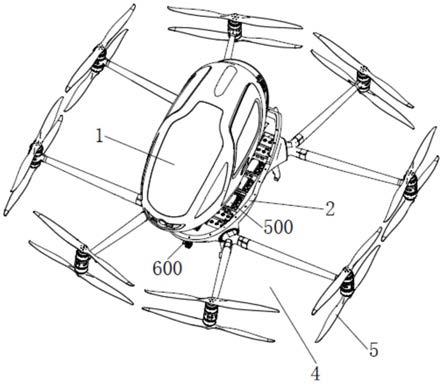
[0001]
本实用新型涉及飞行器技术领域,更具体地说,它涉及一种自动飞行器。
背景技术:
[0002]
人类很早就有在空中像鸟类一样飞行的理想。长期以来,人类为能飞上天空想尽了各种办法。随着科学技术的不断发展,人类在空中飞行的梦想成为了现实。目前的飞行器,例如传统的直升机,需要专业人员驾驶,使得飞行器的应用受限较多。
技术实现要素:
[0003]
本实用新型的目的是提供一种自动飞行器,解决需要专业人员驾驶,使得飞行器的应用受限较多的技术问题。
[0004]
本实用新型的上述技术目的是通过以下技术方案得以实现的:一种自动飞行器,包括座舱和底舱,所述座舱内设有单人座椅、人机交互控制台、导航系统和飞行控制单元,所述人机交互控制台和所述导航系统均与所述飞行控制单元电连接,所述底舱设有多组机臂组,所述机臂组上安装有螺旋桨,所述飞行控制单元控制螺旋桨;
[0005]
当乘客在所述人机交互控制台选择目的地后,所述导航系统识别该自动飞行器的当前位置,规划航线后所述飞行控制单元控制螺旋桨转动实现自动飞行。
[0006]
作为进一步优化的,所述底舱上设有多个用于分别安装多组所述机臂组的固定座,所述固定座为碳纤维模压成型的固定座。
[0007]
作为进一步优化的,每组所述机臂组均包括第一机臂和第二机臂,所述第一机臂的和所述第二机臂的远离所述底舱的一端均设有电机安装座,所述电机安装座上安装有上下两个电机,所述第一机臂上和所述第二机臂上均安装有两个分别安装在上下两个电机上的螺旋桨。
[0008]
作为进一步优化的,所述电机安装座的下安装面与水平面成一定夹角。
[0009]
作为进一步优化的,所述电机安装座的下安装面与水平面的夹角为5
°
。
[0010]
作为进一步优化的,所述第一机臂和所述第二机臂均可折叠和展开;
[0011]
和/或,所述第一机臂比所述第二机臂长;
[0012]
和/或,所述机臂组共有四组;
[0013]
和/或,上下螺旋桨转向相反。
[0014]
作为进一步优化的,还包括后舱,所述后舱设有行李箱;
[0015]
和/或,所述座舱和所述底舱为分离式总体结构;
[0016]
和/或,所述座舱设有舱门,所述舱门为鸥翼门或剪刀门。
[0017]
作为进一步优化的,所述座舱与所述底舱之间设有减震组件,所述减震组件包括弹性垫、弹性内衬套和弹性轴套,所述弹性内衬套位于所述弹性垫内,所述弹性轴套包裹在所述弹性垫外。
[0018]
作为进一步优化的,所述底舱内置多组电池组,多组电池组并联布置,电池组内置
用于实时采集电池的电压、电流和电量的电池管理系统。
[0019]
作为进一步优化的,所述飞行控制单元包括惯性测量模块,惯性测量模块用于实时采集飞行器的姿态;
[0020]
和/或,所述底舱还设有云台模块,所述云台模块与所述飞行控制单元电连接,所述云台模块用于获取飞行器外的实时画面,所述飞行控制单元控制所述云台模块的转向。
[0021]
综上所述,本实用新型具有以下有益效果:本实用新型中的自动飞行器,无需专业驾驶人员,乘客在人机交互控制台选择目的地附近的固定起降点,即可安心乘坐,该自动飞行器在飞行过程中采用智能导航系统,航线自主飞行,通过精准定位,进行点对点倒u形直线飞行,安全快捷。
附图说明
[0022]
图1是实施例中的自动飞行器的座舱和底舱分离后的结构示意图;
[0023]
图2是实施例中的自动飞行器的人机交互控制台的结构示意图;
[0024]
图3是实施例中的自动飞行器的行李箱打开后的结构示意图;
[0025]
图4是实施例中的自动飞行器的机臂组折叠后的结构示意图;
[0026]
图5是实施例中的自动飞行器的电机安装座和电机的结构示意图;
[0027]
图6是实施例中的自动飞行器的舱门打开后的结构示意图;
[0028]
图7是实施例中的自动飞行器的减震组件的结构示意图。
[0029]
图中:1、座舱;11、舱门;2、底舱;3、人机交互控制台;31、人机交互界面;4、机臂组;41、第一机臂;42、第二机臂;5、螺旋桨;6、后舱;61、行李箱;7、固定座;8、电机安装座;9、电机;100、弹性垫;200、弹性内衬套;300、弹性轴套;400、螺丝;500、电池组;600、云台模块。
具体实施方式
[0030]
为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚、明白,以下结合附图和实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
[0031]
本实施例公开了一种自动飞行器,如图1所示,该自动飞行器包括座舱1和底舱2。结合图2所示,座舱1内设有单人座椅、人机交互控制台3、导航系统和飞行控制单元,人机交互控制台3与飞行控制单元电连接。底舱2设有多组机臂组4,每组机臂组4上安装有螺旋桨5,飞行控制单元控制所有螺旋桨5的运行。乘客在人机交互控制台3选择目的地,导航系统识别该自动飞行器的当前位置,将数据传输至飞行控制单元,规划航线后,飞行控制单元控制螺旋桨5的转动,实现自动飞行。本实施例中的自动飞行器,无需专业驾驶人员,乘客在人机交互控制台3选择目的地附近的固定起降点,即可安心乘坐,该自动飞行器在飞行过程中采用智能导航系统,航线自主飞行,通过精准定位,进行点对点倒u形直线飞行,安全快捷。在本实施例中,结合图3所示,该自动飞行器还包括后舱6,后舱6设有行李箱61,行李箱61供乘客放置行李,方便出行。值得说明的是,本实施例中的自动飞行器为载人飞行器,但是在实际应用时,稍加改装,亦可用作他途,例如物流和消防等。
[0032]
在本实施例中,结合图3和图4所示,底舱2上设有多个用于分别安装多组机臂组4的固定座7,固定座7为碳纤维模压成型的固定座7,相比于其他材质例如铝合金,重量更轻,
可以显著地提升自动飞行器的续航能力和机动性能。在本实施例中,每组机臂组4均包括第一机臂41和第二机臂42,第一机臂41的和第二机臂42的远离底舱2的一端均设有电机安装座8,电机安装座8安装有上下两个电机9,第一机臂41上和第二机臂42上均安装有两个螺旋桨5,两个螺旋桨5分别安装在上下两个电机9上。在本实施例中,上下两个螺旋桨5转向相反,以抵消部分扭矩。在本实施例中,结合图5所示,电机安装座8的下安装面与水平面成一定夹角,使得安装在电机安装座8下方的的电机9和螺旋桨5均与水平面成一定夹角,以提供水平力矩,提高偏航能力。优选的,电机安装座8的下安装面与水平面的夹角为5
°
。在本实施例中,第一机臂41和第二机臂42均可折叠和展开,折叠后显著减小整体的体积,方便存放。在本实施例中,第一机臂41比第二机臂42长。在本实施例中,机臂组4共有四组,螺旋桨5共有十六根,能够更好地实现垂直起飞和垂直降落,无需大型机场、滑行跑道等传统基础设施。在本实施例中,结合图6所示,座舱1设有舱门11,舱门11优选为鸥翼门或剪刀门。
[0033]
在本实施例中,如图1所示,座舱1和底舱2为分离式总体结构,座舱1与底舱2可分离式地安装在一起。在本实施例中,如图7所示,座舱1与底舱2之间设有减震组件,减震组件包括弹性垫100、弹性内衬套200和弹性轴套300,弹性内衬套200位于弹性垫100内,弹性轴套300包裹在弹性垫100外。弹性垫100安装在座舱1上,弹性轴套300位于弹性垫100与座舱1之间,座舱1与底舱2组装时,螺丝400或螺栓或其他连接件穿过弹性内衬套200插入底舱2实现安装固定,弹性垫100的下端面抵紧底舱2。减震组件减少底舱2的震动传导至座舱1,可以提高驾乘感受。
[0034]
在本实施例中,如图1所示,底舱2内置多组电池组500,多组电池组500并联设置,电池组500内置电池管理系统,电池管理系统用于实时采集电池的电压、电流和电量。在本实施例中,飞行控制单元包括惯性测量模块,惯性测量模块用于实时采集飞行器的姿态,以实现飞行器的姿态精准控制。在本实施例中,结合图1和图2所示,底舱2还设有云台模块600,云台模块600与飞行控制单元电连接,云台模块600用于获取飞行器外的实时画面,飞行控制单元可控制云台模块600的转向,云台模块600将实时画面传输至人机交互控制台3的人机交互界面31,乘客可以在飞行过程中全景欣赏飞行的沿途风景。人机交互控制台3具有平板电脑式的人机交互界面31,提升用户体验。
[0035]
以上具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对以上实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips