
 商标分类
商标分类  商标转让
商标转让 
一种基于直轨道的舰载直升机自动牵引装置及方法与流程
 2021-02-13 02:02:41|
2021-02-13 02:02:41| 246|
246| 起点商标网
起点商标网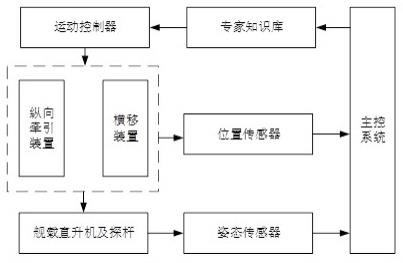
[0001]
本发明涉及舰载直升机舰面综合保障技术领域,尤其是一种基于直轨道的舰载直升机自动牵引装置及方法。
背景技术:
[0002]
制约舰载直升机发展的最主要因素在于,如何保障舰载直升机在恶劣海情下的安全起降、转运。为了解决上述问题并提高舰载直升机在恶劣海情下的出勤率和安全性,各国工程师设计出了许多不同的解决方案,如鱼叉-格栅装置,e系统,rast系统,asist系统等。包括中国船舶工业系统工程研究院提出的一种海上作业直升机的安全快速回收及放飞系统在一定程度上有效解决了舰载直升机的安全起降问题,且代表了该领域的先进水平。但是上述解决方案均存在直升机转运过程中操作过于繁琐、对操作人员经验要求极高、系统安全性较差等问题。
技术实现要素:
[0003]
本发明需要解决的技术问题是提供一种基于直轨道的舰载直升机自动牵引装置及方法,有效的解决了现有舰载直升机牵引系统所存在的操作过于繁琐、对操作人员经验要求极高、系统安全性较差等问题。
[0004]
为解决上述技术问题,本发明所采用的技术方案是:一种基于直轨道的舰载直升机自动牵引装置,所述牵引装置包括用于驱动舰载直升机运动的纵向牵引装置、用于驱动舰载直升机运动的横移装置、用于实时检测舰载直升机于甲板的位置的两个位置传感器、用于实时检测舰载直升机于甲板的姿态的两个姿态传感器、专家知识库、用于控制并驱动纵向牵引装置与横移装置动作的运动控制器、主控系统、舰载直升机及其探杆;主控系统通过两个位置传感器和两个姿态传感器对舰载直升机的位姿进行实时结算,并将其发送至专家知识库;专家知识库依据舰载直升机降落时所处的位姿给出自动牵引方案,并将其发送至运动控制器。
[0005]
本发明技术方案的进一步改进在于:所述两个位置传感器分别为安装于纵向牵引装置的增量式旋转编码器和安装于横移装置的直线位置传感器,通过增量式旋转编码器和直线位置传感器协调能够明确舰载直升机探杆相对甲板坐标系的具体位置。
[0006]
本发明技术方案的进一步改进在于:所述两个姿态传感器分别为安装于舰载直升机探杆的绝对式旋转编码器一和安装于舰载直升机可旋转后轮的绝对式旋转编码器二,绝对式旋转编码器一和绝对式旋转编码器二分别用于检测舰载直升机相对探杆的转动与舰载直升机可旋转后轮的转动,通过绝对式旋转编码器一和绝对式旋转编码器二协调能够明确舰载直升机的姿态。
[0007]
一种基于直轨道的舰载直升机自动牵引方法,包括以下步骤:步骤1,当舰载直升机安全降落到甲板并被可靠系留之后由两个位置传感器对舰载直升机探杆相对甲板坐标系的位置进行测算;
步骤2,由两个姿态传感器对舰载直升机相对甲板坐标系的姿态进行测算;步骤3,将所得出的舰载直升机位置、姿态传输至主控系统并根据专家知识库直接给出自动牵引方案;步骤4,由运动控制器驱动纵向牵引装置与横移装置运动并按照专家知识库所给出的自动牵引方案完成舰载直升机牵引工作直至舰载直升机相对舰船平行并处于中心线位置;步骤5,由运动控制器驱动纵向牵引装置将舰载直升机直接牵引至机库内指定位置。
[0008]
本发明技术方案的进一步改进在于:所述专家知识库能够按照现有的专家经验依据舰载直升机被定位的位姿提供一整套的牵引方案,具体包括以下步骤:s1,根据舰载直升机位姿判断舰载直升机相对轨道的方向,将所有可能出现的相对方向具体归纳为朝向中心线方向和背离中心线方向;s2,根据舰载直升机朝向,给出牵引方案,缓慢横向牵引舰载直升机至探杆中心位于舰船中心线上方;s3,沿中心线方向以较快速度纵向牵引舰载直升机直至舰载直升机与舰船中心线对齐;s4,小幅度调整舰载直升机横向与纵向位置,直至传感器检测到可旋转后轮方向朝向机库且与舰船中心线平行。
[0009]
本发明技术方案的进一步改进在于:所述舰载直升机相对舰船平行并处于中心线位置,称为最终状态,具体包括:a.探杆中心位于舰船中心线上方;b.舰载直升机与舰船中心线对齐;c.可旋转后轮方向必须朝向机库且与舰船中心线平行。
[0010]
由于采用了上述技术方案,本发明取得的技术进步是:1、本发明基于现有的舰载直升机舰面辅助系统,使用舰面配适的纵向牵引装置与舰载直升机横移装置完成转运操作,只需要安装对应的位置传感器与姿态传感器即可,对现有装备改动极小。
[0011]
2、本发明所提供的专家知识库有效覆盖了舰载直升机所可能的各种位姿,以简单直观的方法给出了牵引解决方案。
[0012]
3、本发明有效提升里舰载直升机转运过程中的作业效率,极大程度上保障了舰面辅助人员及设备的安全。
附图说明
[0013]
图1是本发明自动牵引装置结构关系示意图;图2是本发明自动牵引方法步骤流程图;图3是本发明舰载直升机于甲板所处环境示意图;图4是本发明舰载直升机背离中心线方向示意图;图5是本发明舰载直升机朝向中心线方向示意图;图6是本发明舰载直升机最终状态示意图;图7是本发明专家知识库给出舰载直升机牵引方案s2示意图一;图8是本发明专家知识库给出舰载直升机牵引方案s2示意图二;
图9是本发明专家系统给出舰载直升机牵引方案s2示意图三。
[0014]
其中,1、纵向牵引装置,2、横移装置,3、增量式旋转编码器,4、直线位置传感器,5、绝对式旋转编码器一,6、绝对式旋转编码器二,7、可旋转后轮,8、前轮,9、探杆,10、机库方向,11、舰船中心线,12、探杆中心,13、后轮旋转轴心。
具体实施方式
[0015]
本发明是针对现有技术中均存在直升机转运过程中操作过于繁琐、对操作人员经验要求极高、系统安全性较差等问题而研发的一种基于直轨道的舰载直升机自动牵引装置及方法。
[0016]
下面结合附图对本发明做进一步详细说明:如图1、3所示,一种基于直轨道的舰载直升机自动牵引装置:包括纵向牵引装置1、横移装置2、两个位置传感器、两个姿态传感器、专家知识库、运动控制器、主控系统、舰载直升机及其探杆9;其中纵向牵引装置1与横移装置2用于驱动舰载直升机运动;舰载直升机通过探杆9与横移装置2相连;两个位置传感器与两个姿态传感器用于实时检测舰载直升机于甲板的位姿;控制系统通过上述四个传感器对舰载直升机的位姿进行实时结算,并将其发送至专家知识库;专家知识库依据舰载直升机降落时所处的位姿给出自动牵引方案,并将其发送至运动控制器;运动控制器用于控制、驱动纵向牵引装置与横移装置动作。
[0017]
如图1、2所示,一种基于直轨道的舰载直升机自动牵引方法,包括以下步骤:步骤1,当舰载直升机安全降落到甲板并被可靠系留之后由两个位置传感器对舰载直升机探杆9相对甲板坐标系的位置进行测算;步骤2,由两个两个姿态传感器对舰载直升机相对甲板坐标系的姿态进行测算;步骤3,将所得出的舰载直升机位置、姿态传输至主控系统并根据专家知识库直接给出自动牵引方案;步骤4,由运动控制器驱动纵向牵引装置1与横移装置2运动并按照专家知识库所给出的自动牵引方案完成舰载直升机牵引工作直至舰载直升机相对舰船平行并处于中心线位置;步骤5,由运动控制器驱动纵向牵引装置将舰载直升机直接牵引至机库内指定位置。
[0018]
如图3所示,本发明所提供的方法适用于但不局限于以美国“黑鹰系列”及其仿制机型,该类机型特点在于两个前轮固定不可旋转,后轮可以自由转向且旋转轴不位于轮胎正中。
[0019]
如图3所示,本发明所提供的方法目的在于将直升机由降落时的随机位姿,自动牵引至目标机库内。且进入机库时,舰载直升机应满足相对于舰船中心线的对应条件。
[0020]
如图3所示,机库内安装有纵向牵引装置1,直升机于甲板降落后由横移装置2通过探杆9对其进行固定。两个位置传感器分别为安装于纵向牵引装置1的增量式旋转编码器3、安装于横移装置2的直线位置传感器4,通过两个传感器协调可以明确舰载直升机探杆9相对甲板坐标系的具体位置。两个姿态传感器分别为安装于舰载直升机探杆9的绝对式旋转编码器一5、安装与舰载直升机可旋转后轮7的绝对式旋转编码器二6,两个编码器分别用于检测舰载直升机相对探杆的转动与舰载直升机可旋转后轮7的转动,通过两个编码器协调可以明确舰载直升机的姿态。
[0021]
本发明总结了四种舰载直升机降落时所处的典型位姿,并将其分为两类。
[0022]
如图4所示,给出了舰载直升机被系留时所处位姿为背离中心线方向的典型示意图。
[0023]
如图5所示,给出了舰载直升机被系留时所处位姿为朝向中心线方向的典型示意图。
[0024]
如图6所示,给出了舰载直升机经过自动牵引后的目标位姿,具体归纳为以下三个条件:a.探杆9中心位于舰船中心线11上方;b.舰载直升机与舰船中心线11对齐;c.可旋转后轮7方向必须朝向机库且与舰船中心线11平行。只有在该条件下,舰载直升机可以顺利被牵引至机库内。
[0025]
本发明所提供的专家知识库总结了现有专家的操作经验,并可以按照专家经验,依据舰载直升机被定位的位姿提供一对应的牵引方案,具体包括以下步骤:s1,根据舰载直升机位姿判断舰载直升机相对轨道的方向,将所有可能出现的相对方向具体归纳为2种,包括:朝向中心线方向和背离中心线方向。如图4与图5所示。
[0026]
s2,根据舰载直升机朝向,给出牵引方案,以舰载直升机朝向中心线方向为例;首先通过横移装置将舰载直升机向中心线方向校直,同时通过纵向牵引装置缓慢朝向机库方向牵引舰载直升机,直至舰载直升机探杆9中心位于舰船中心线11上方。对于舰载直升机背离中心线方向相关操作与之完全相同。如图7、8、9所示。
[0027]
s3,沿中心线背离机库方向,以较快速度纵向牵引舰载直升机,此时由于甲板对直升机后轮摩擦力作用,可旋转后轮7发生旋转。继续牵引,直至舰载直升机与舰船中心线11对齐。此时,舰载直升机后轮方向与所需最终状态相反。
[0028]
s4,小幅度沿横向来回调整舰载直升机位置,同时配合对应纵向牵引操作,直至传感器检测到可旋转后轮方向朝向机库且与舰船中心线11平行。
[0029]
至此,舰载直升机位姿调整工作结束,可以直接通过纵向牵引装置方便的将舰载直升机牵引至机库内。
[0030]
综上所述,本发明基于现有的舰载直升机舰面辅助系统,使用舰面配适的纵向牵引装置与舰载直升机横移装置完成转运操作,只需要安装对应的位置传感器与姿态传感器即可,对现有装备改动极小;专家知识库有效覆盖了舰载直升机所可能的各种位姿,以简单直观的方法给出了牵引解决方案;有效提升里舰载直升机转运过程中的作业效率,极大程度上保障了舰面辅助人员及设备的安全。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips