
 商标分类
商标分类  商标转让
商标转让 
驻车制动系统、操作驻车制动系统的方法及飞行器与流程
 2021-02-13 01:02:23|
2021-02-13 01:02:23| 401|
401| 起点商标网
起点商标网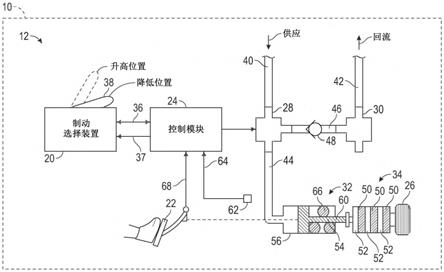
[0001]
本发明涉及一种驻车制动系统。更具体地,本公开致力于一种指示驻车制动系统的实际位置的制动选择装置。
背景技术:
[0002]
飞行器包括驻车制动杆或其它选择机构,飞行员使用该机构来接合驻车制动器。具体地,在至少一些系统中,飞行员可以踩下制动踏板,并然后激活驻车制动杆,该驻车制动杆进而关闭液压驻车制动阀。当驻车制动阀关闭时,加压液压流体被困在制动器内。换言之,不存在将飞行器的驻车制动器保持在原地的机械连杆。
[0003]
在操作中,驻车制动杆被飞行员向上拉动并进入接合位置,从而使流体困在制动器内。然而,应理解,驻车制动杆仅反映驻车制动器的指令位置,而不反映制动系统的实际状态。因此,在驻车制动阀无法维持足够的压力以保持驻车制动系统接合的情况下,驻车制动杆仍保持在接合位置。
技术实现要素:
[0004]
根据几个方面,公开了一种驻车制动系统。驻车制动系统包括:一个或多个压力换能器,监测驻车制动系统的流体压力;制动选择装置,被配置成指示驻车制动系统处于接合状态或脱离状态;一个或多个处理器,与制动选择装置和一个或多个压力换能器电子通信;以及存储器,耦接到一个或多个处理器。存储器存储包括数据库和程序代码的数据,该程序代码在被一个或多个处理器执行时,使驻车制动系统接收指示驻车制动系统正置于接合状态的多个制动信号。响应于接收到多个制动信号,使驻车制动系统监测一个或多个压力换能器以确定驻车制动系统的流体压力。驻车制动系统确定驻车制动系统的流体压力小于阈值压力。响应于确定驻车制动系统的流体压力小于阈值压力,制动控制系统命令制动选择装置指示驻车制动系统处于脱离状态。
[0005]
在另一方面,公开了一种操作驻车制动系统的方法,其中驻车制动系统包括制动选择装置,该制动选择装置被配置成指示驻车制动系统处于接合状态或脱离状态。该方法包括通过计算机接收指示驻车制动系统正置于接合状态的多个制动信号。响应于接收到多个制动信号,该方法包括监测一个或多个压力换能器以确定驻车制动系统的流体压力。该方法还包括确定驻车制动系统处的流体压力小于阈值压力。响应于确定驻车制动系统的流体压力小于阈值压力,该方法包括命令制动选择装置指示驻车制动系统处于脱离状态。
[0006]
在又一方面,公开了一种具有驻车制动系统的飞行器。飞行器包括:多个踏板,被配置成生成制动信号,其中,制动信号指示多个踏板被踩下;驻车制动阀,被配置成调节供应至驻车制动系统的液压;一个或多个压力换能器,监测驻车制动系统的液压;以及制动选择装置,被配置成响应于被置于接合状态而生成设定信号。制动选择装置指示驻车制动系统处于接合状态或脱离状态。飞行器还包括:一个或多个处理器,与制动选择装置、驻车制动阀、多个踏板、以及一个或多个压力换能器电子通信;以及存储器,耦接到一个或多个处
理器。存储器存储包括数据库和程序代码的数据,该程序代码在被一个或多个处理器执行时,使驻车制动系统接收来自制动选择装置的设定信号和来自多个踏板的制动信号。响应于接收到来自制动选择装置的设定信号和来自多个踏板的制动信号,使驻车制动系统监测一个或多个压力换能器以确定驻车制动系统的液压。还使驻车制动系统确定驻车制动系统的液压小于阈值压力。响应于确定驻车制动系统的液压小于阈值压力,使驻车制动系统命令制动选择装置指示驻车制动系统处于脱离状态。
[0007]
已讨论的特征、功能、以及优点可以在各种实施例中独立地实现,或者可以在其它实施例中组合,这些特征、功能、以及优点的进一步细节可以参考下面的描述和附图来看到。
附图说明
[0008]
本文描述的附图仅用于说明目的,而不旨在以任何方式限制本公开的范围。
[0009]
图1是根据示例性实施例的用于交通工具的驻车制动系统的示意图;
[0010]
图2是图1所示的根据示例性实施例的制动选择装置的示意图;
[0011]
图3是示出操作图1所示的根据示例性实施例的驻车制动系统的方法的处理流程图;
[0012]
图4是图1所示的根据示例性实施例的驻车制动系统的替代实施例,该实施例包括关闭位置所示的双稳态控制阀;
[0013]
图5示出根据示例性实施例的处于打开位置的双稳态控制阀,以在制动控制阀不工作时保持驻车制动系统内的压力;
[0014]
图6是示出操作图4至图5所示的根据示例性实施例的驻车制动系统的方法的处理流程图。
[0015]
图7是用于操作根据示例性实施例的所公开的驻车制动系统的计算机控制系统。
具体实施方式
[0016]
本发明致力于一种用于交通工具的容错驻车制动系统。该驻车制动系统包括:驻车制动阀,被配置为维持驻车制动系统的流体压力;一个或多个压力换能器,监测制动系统的流体压力;以及制动选择装置。制动选择装置被配置为指示驻车制动系统处于接合状态或脱离状态。驻车制动系统还包括监测压力换能器的一个或多个处理器。如果一个或多个处理器确定制动系统的流体压力小于阈值压力,则处理器命令(instruct,指导)制动选择装置指示驻车制动系统处于脱离状态。因此,所公开的制动选择装置反映驻车制动器的实际位置,而不是指令位置。
[0017]
以下描述本质上仅仅是示例性的,而不旨在限制本公开、应用、或用途。
[0018]
现在参考图1,示出了用于交通工具10的驻车制动系统12的示意图。驻车制动系统12包括制动选择装置20、多个制动踏板22(在图1中仅可见一个制动踏板22)、控制模块24、多个车轮26(在图1中仅示出一个车轮26)、制动控制阀28、驻车制动阀30、活塞汽缸组件32、以及制动器组(brake stack)34。控制模块24与制动选择装置20、多个制动踏板22、制动控制阀28以及驻车制动阀30电子通信。如下所述,制动选择装置20指示驻车制动系统12的实际状态,而不是驻车制动系统12的命令状态。
[0019]
制动选择装置20被配置成指示驻车制动系统12处于接合状态或脱离状态。例如,在如图1所示的非限制性实施例中,制动选择装置20包括指示驻车制动系统12的状态的杆38。具体地,当杆38处于如图1所示的降低位置时,驻车制动系统12处于脱离状态。然而,当杆38移动到升高位置(以虚线示出)时,驻车制动系统12处于接合状态。虽然图1示出了杆38,但应当理解,图1本质仅仅是示例性的并且制动选择装置20可以是任何其它类型的选择装置。例如,在替代实施例中,制动选择装置20是按钮。制动选择装置20被配置成响应于被置于接合状态而生成设定信号36,其中设定信号36被发送到控制模块24。控制模块24还通过电源线37将电力提供至制动选择装置20的电磁阀35(参见图2)。
[0020]
在实施例中,交通工具10是飞行器。然而,应当理解,所公开的驻车制动系统12可用于采用线控制动系统的任何交通工具中。在一个非限制性实施例中,驻车制动系统12采用液压制动流体。然而,驻车制动系统12不限于液压系统。例如,在另一实施例中,驻车制动系统12是气动系统。还应当理解,尽管图1仅示出了单个驻车制动系统12,但飞行器实际上可以包括多个驻车制动系统12。例如,飞行器可以包括与飞行器的左轮和右轮相对应的分开的制动系统。
[0021]
图2是制动选择装置20的示例性示意图。制动选择装置20包括与控制模块24电子通信的第一开关sw1和电磁阀35。在如图所示的实施例中,第一开关sw1是单刀双掷开关,然而,应当理解,也可以使用其它类型的开关。第一开关sw1包括“设定”和“未设定”两个位置。杆38可操作地连接到第一开关sw1和电磁阀35两者。因此,将杆38升高到接合状态使第一开关sw1致动到“设定”位置,并且设定信号36被发送到控制模块24。类似地,降低杆38使第一开关sw1致动到“未设定”位置。控制模块24通过电源线37将电力提供至电磁阀35,其中电磁阀35被电源线37提供的电力赋能,以将杆38锁定到升高位置(图1所示)。
[0022]
参照图1,驻车制动系统12还包括供应压力导管40、回流压力导管42、以及制动管路导管44。供应压力导管40流体连接到制动控制阀28,回流压力导管42流体连接到驻车制动阀30,并且制动管路导管44流体连接到活塞汽缸组件32。制动控制阀28被配置成在关闭位置与打开位置之间致动。当制动控制阀28处于关闭位置时,制动控制阀28将制动管路导管44与回流压力导管42流体连接。当制动控制阀28处于打开位置时,制动控制阀28将制动管路导管44与供应压力导管40流体连接,并且加压制动流体被供应到活塞汽缸组件32。
[0023]
驻车制动阀30被配置成维持驻车制动系统12的流体压力。具体地,驻车制动阀30被配置成维持驻车制动系统12的活塞汽缸组件32处的流体压力。在实施例中,如果驻车制动系统12是液压制动系统,则驻车制动阀30被配置成维持驻车制动系统12内的液压。驻车制动系统12还包括止回阀48,该止回阀48设置在连接制动控制阀28与驻车制动阀30的导管46中。止回阀48阻止制动流体从回流压力导管42流出并流到制动控制阀28。当驻车制动阀30从打开位置移动并移动到关闭位置时,加压制动流体保持在制动管路导管44中。换言之,当驻车制动阀30处于关闭位置时,加压制动流体以阈值压力保持在制动管路导管44长达有限的时间量,并且驻车制动系统12处于接合状态,如下面更详细地讨论。
[0024]
制动器组34包括一个或多个转子50和一个或多个定子52,其中转子50与车轮26协同旋转。活塞汽缸组件32包括活塞或力构件54、汽缸56、以及偏置元件66,其中力构件54被配置成在汽缸56内以线性运动来回平移。在所示的实施例中,偏置元件66是螺旋弹簧。当制动控制阀28打开以将供应压力导管40与制动管路导管44流体连接时,加压制动流体被供应
到活塞汽缸组件32,并使力构件54克服由偏置元件66施加的偏置力。一旦力构件54克服偏置力,力构件54在汽缸56内沿朝向制动器组34的方向平移。力构件54继续朝向制动器组34行进,直到力构件54的端部60抵靠制动器组34并在制动器组34上施加压缩力。当制动器组34被压缩时,在转子50与定子52之间生成抵抗车轮26的旋转的摩擦力。
[0025]
继续参考图1,多个制动踏板22可操作地耦接到位于汽缸56内的力构件54。因此,当操作者踩下多个制动踏板22时,这使力构件54在汽缸56内沿朝向制动器组34的方向平移,以在制动器组34上施加压缩力。如图1所示,多个制动踏板22与控制模块24连通。多个制动踏板22被配置成响应于被踩下而生成踩下信号68。具体地,多个制动踏板22响应于被操作者踩下而生成发送到控制模块24的踩下信号68。
[0026]
驻车制动系统12还包括与控制模块24电子通信的一个或多个压力换能器62。压力换能器62监测驻车制动系统12的流体压力,并生成被称为制动压力信号64的比例电信号。具体地,制动压力信号64表示驻车制动系统12的活塞汽缸组件32处的流体压力。
[0027]
操作者可以尝试将驻车制动系统12置于接合状态。然而,有时驻车制动系统12中存在可能阻止驻车制动系统12维持接合状态的故障,因为驻车制动系统12不能维持足够的压力以保持在接合状态。故障的一个示例是当驻车制动阀30不工作并且不能保持在关闭位置以保持制动流体压力时。可能使驻车制动系统12不能维持接合状态的故障的一些其它示例包括由于诸如例如管道中的泄漏的问题而从驻车制动系统12逸出的流体。因此,在驻车制动系统12中存在阻止驻车制动系统12维持接合状态的故障的情况下,制动选择装置20返回到脱离状态。因此,操作者被告知驻车制动系统12的实际状态,而不是指令状态。
[0028]
现在描述驻车制动系统12的操作。首先,控制模块24接收指示驻车制动系统12正置于接合状态的多个制动信号。驻车制动信号指示操作者(诸如飞行员)正试图将驻车制动系统12置于接合状态。具体地,在实施例中,多个制动信号包括由制动选择装置20生成的设定信号36和由多个制动踏板22生成的踩下信号68。
[0029]
响应于接收到多个制动信号,控制模块24指示驻车制动阀30从打开位置移动到关闭位置。换言之,控制模块24命令驻车制动阀30关闭并阻断驻车制动系统12的回流压力导管42。如上所述,当驻车制动阀30置于关闭位置时,加压制动流体保持在制动管路导管44中。除了关闭驻车制动阀30之外,响应于接收到多个制动信号,控制模块24监测一个或多个压力换能器62以确定驻车制动系统12的流体压力。然后,控制模块24将驻车制动系统12的流体压力与阈值压力进行比较。
[0030]
阈值压力表示将驻车制动系统12保持在接合状态所需的流体压力。因此,如果驻车制动系统12的流体压力小于阈值压力,则这指示驻车制动系统12中存在故障,该故障可阻止驻车制动系统12维持接合状态。具体地,如图1所示,驻车制动阀30与汽缸56流体连接。阈值压力指示由一个或多个压力换能器62测量出的活塞汽缸组件32处的流体压力足以在预定的时间量内将力构件54保持在汽缸56内的适当位置。
[0031]
预定的时间量在不同类型的驻车制动系统之间变化。然而,应当理解,不期望驻车制动系统12在无限的时间量内维持阈值压力。换言之,因为驻车制动阀30不能在无限的时间量内维持驻车制动系统中的流体压力,因此驻车制动系统12通常随着时间而失去压力。预定时间量基于驻车制动阀30。在一个非限制性实施例中,如果交通工具10是飞行器,则预定的时间量的范围为从大约12小时到大约24小时。
[0032]
在一个实施例中,控制模块24确定驻车制动系统12的流体压力小于阈值压力。响应于确定驻车制动系统12的流体压力(即,在活塞汽缸组件32处)小于阈值压力,控制模块24命令制动选择装置20指示驻车制动系统12处于脱离状态。例如,控制模块24命令制动选择装置20将杆38从升高位置(虚线所示)移动并移动到降低位置。此外,响应于确定驻车制动系统12的流体压力小于阈值压力,控制模块24还命令驻车制动阀30移回到打开位置。打开驻车制动阀30使驻车制动系统12复位。
[0033]
可替代地,在另一实施例中,控制模块24确定驻车制动系统12的流体压力等于或大于阈值压力。换言之,驻车制动系统12能够维持接合状态。响应于确定驻车制动系统12的流体压力等于或大于阈值压力,控制模块24继续命令制动选择装置20指示驻车制动系统12处于接合状态。例如,控制模块24命令制动选择装置20将杆38维持在升高位置(虚线所示)。
[0034]
图3是示出操作图1所示的驻车制动系统12的示例性方法200的处理流程图。参照图1和图3二者,方法200开始于框202。在框202中,控制模块24接收指示驻车制动系统12正置于接合状态的多个制动信号。例如,如框202a所示,在一个实施例中,多个制动信号包括由制动选择装置20生成的设定信号36和由多个制动踏板22生成的踩下信号68。然后,方法200可以前进到框204a和204b。
[0035]
在框204a中,响应于接收到多个制动信号,控制模块24监测一个或多个压力换能器62以确定驻车制动系统12的流体压力。在框202b中,响应于接收到驻车制动信号,控制模块24命令驻车制动阀30从打开位置移动到关闭位置。应当理解,框204a和204b可以大约同时执行。方法200然后可以前进到判定框206。
[0036]
在判定框206中,控制模块24将驻车制动系统12的流体压力与阈值压力进行比较。响应于控制模块24确定驻车制动系统12的流体压力小于阈值压力,方法200前进到框208。
[0037]
在框208中,响应于确定驻车制动系统12的流体压力小于阈值压力,控制模块24命令制动选择装置20指示驻车制动系统12处于脱离状态。方法200然后可以终止。
[0038]
返回参考判定框206,响应于控制模块24确定驻车制动系统12的流体压力等于或大于阈值压力,方法200可前进到框210。
[0039]
在框210中,响应于确定驻车制动系统12的流体压力等于或大于阈值压力,控制模块24继续命令制动选择装置20指示驻车制动系统12处于接合状态。方法200然后可以终止。
[0040]
图4是图1所示的驻车制动系统12的替代实施例,其中制动控制阀28是双稳态控制阀128。双稳态控制阀128是任何类型的控制阀,该控制阀被配置成即使在输入信号不再可用之后仍保持最后的切换状态。换言之,如果控制模块24将失去电力,双稳态控制阀128将仍然保持最后的切换状态。
[0041]
双稳态控制阀128包括两种切换状态,即关闭位置和打开位置。如上所述,双稳态控制阀128在置于如图4所示的关闭位置时,流体连接到驻车制动系统12的回流压力导管42。双稳态控制阀128在置于如图5所示的打开位置时,流体连接到供应压力导管40。因此,当双稳态控制阀128处于打开位置时,来自供应源(未示出)的加压制动流体被提供到活塞汽缸组件32。在实施例中,双稳态控制阀128是机械操作的液压控制阀,然而,应当理解,可以使用其它类型的双稳态控制阀代替。
[0042]
在如图4所示的实施例中,驻车制动阀30不工作,并且双稳控制阀128处于关闭位置。换言之,驻车制动阀30不能移动到打开位置以阻断向回流压力导管42的制动流体的供
应。如图4所示,在回流压力导管42、制动管路导管44、以及连接双稳态控制阀128与驻车制动阀30的导管46中存在未加压的制动流体。结果,未加压的制动流体流向驻车制动系统12的回流压力导管42。
[0043]
当驻车制动阀30不工作时,一个或多个压力换能器62指示驻车制动系统12的流体压力小于阈值压力。控制模块24接收驻车制动系统12的流体压力作为输入。然后,控制模块24将驻车制动系统12的流体压力与阈值压力进行比较,并确定驻车制动系统12的流体压力小于阈值压力。响应于确定驻车制动系统12的流体压力小于阈值压力,控制模块24命令双稳态控制阀128致动到如图5所示的打开位置。
[0044]
图5是图4中的驻车制动系统12的图示,其中双稳态控制阀128已从关闭位置致动到打开位置。如图5所示,双稳态控制阀128在处于打开位置时将制动管路导管44与供应压力导管40流体连接。因此,加压制动流体存在于制动管路导管44中,并且驻车制动系统12处于接合状态。因此,即使驻车制动阀30不工作,驻车制动系统12仍然可置于接合状态。
[0045]
图6是示出操作图4和图5所示的驻车制动系统12的示例性方法300的处理流程图。参照图4、图5和图6,方法300开始于框302。在框302中,控制模块24接收指示驻车制动系统12正置于接合状态的多个制动信号。例如,在一个实施例中,多个制动信号包括由制动选择装置20生成的设定信号36和由多个制动踏板22生成的踩下信号68。方法300然后可以前进到框304a和304b。
[0046]
在框304a中,响应于接收到多个制动信号,控制模块24监测一个或多个压力换能器62以确定驻车制动系统12的流体压力。在框302b中,响应于接收到驻车制动信号,控制模块24命令驻车制动阀30关闭并阻断回流压力导管42。应当理解,框304a和304b可以大约同时执行。方法300然后可以前进到判定框306。
[0047]
在判定框306中,控制模块24将驻车制动系统12的流体压力与阈值压力进行比较。响应于控制模块24确定驻车制动系统12的流体压力小于阈值压力,方法300前进到框308。
[0048]
在框308中,响应于确定驻车制动系统12的流体压力小于阈值压力,控制模块24命令双稳态控制阀128从关闭位置(图4所示)致动到打开位置(图5所示)。方法300然后可以终止。
[0049]
返回参考判定框306,响应于控制模块24确定驻车制动系统12的流体压力等于或大于阈值压力,方法300可以前进到框310。
[0050]
在框310中,响应于确定驻车制动系统12的流体压力等于或大于阈值压力,控制模块24继续命令双稳态控制阀128保持在关闭位置。然后,方法300可以终止。
[0051]
总体参考附图,所公开的驻车制动系统包括各种技术效果和益处。具体地,所公开的系统将关于驻车制动系统的实际状态而不是指令状态的指示提供至操作者。因此,如果驻车制动系统中存在使系统脱离的故障,则操作者会意识到该状态。此外,所公开的驻车制动系统还提供了一种即使在驻车制动阀不工作时也仍维持所需制动流体压力以将驻车制动系统保持在接合状态的方法。最后,与用于将驻车制动系统保持在接合状态的一些其它方法不同,双稳态控制阀不需要制动踏板与制动系统之间的机械连接。
[0052]
现在参考图7,控制模块24在一个或多个诸如示例性计算机系统1030的计算机装置或系统上实现。计算机系统1030包括处理器1032、存储器1034、大容量存储存储器装置1036、输入/输出(i/o)接口1038、以及人机接口(hmi)1040。计算机系统1030经由网络1026
或i/o接口1038可操作地耦接到一个或多个外部资源1042。外部资源可以包括但不限于服务器、数据库、大容量存储装置、外围装置、基于云的网络服务、或者可以由计算机系统1030使用的任何其他合适的计算机资源。
[0053]
处理器1032包括选自微处理器、微控制器、数字信号处理器、微型计算机、中央处理单元、现场可编程门阵列、可编程逻辑装置、状态机、逻辑电路、模拟电路、数字电路、或基于存储在存储器1034中的操作指令来操纵信号(模拟或数字)的任何其它装置中的一个或多个装置。存储器1034包括单个存储器装置或多个存储器装置,这些存储器装置包括但不限于只读存储器(rom)、随机存取存储器(ram)、易失性存储器、非易失性存储器、静态随机存取存储器(sram)、动态随机存取存储器(dram)、闪存、高速缓冲存储器、或能够存储信息的任何其它装置。大容量存储存储器装置1036包括数据存储装置,该数据存储装置诸如硬盘驱动器、光驱、磁带驱动器、易失性或非易失性固态装置、或能够存储信息的任何其它装置。
[0054]
处理器1032在驻留在存储器1034中的操作系统1046的控制下操作。操作系统1046管理计算机资源,使得具体化为一个或多个计算机软件应用程序(诸如驻留在存储器1034中的应用程序1048)的计算机程序代码可以具有由处理器1032执行的指令。在替代示例中,处理器1032可以直接执行应用程序1048,在这种情况下,可以省略操作系统1046。一个或多个数据结构1049还驻留在存储器1034中,并且可由处理器1032、操作系统1046、或应用程序1048使用以存储或操纵数据。
[0055]
i/o接口1038提供机器接口,该机器接口将处理器1032可操作地耦接到诸如网络1026或外部资源1042的其它装置和系统。应用程序1048由此通过经由经由i/o接口1038进行通信来与网络1026或外部资源1042协同工作,以提供包括本公开的示例的各种特征、功能、应用程序、处理、或模块。应用程序1048还包括由一个或多个外部资源1042执行的程序代码,或者依赖于计算机系统1030外部的其它系统或网络部件所提供的功能或信号。实际上,鉴于可能的几乎无穷无尽的硬件和软件配置,本领域普通技术人员将理解,本公开的示例可包括位于计算机系统1030外部、分布在多个计算机或其它外部资源1042当中、或由通过网络1026作为服务(例如云计算服务)而提供的计算资源(硬件和软件)提供的应用程序。
[0056]
hmi 1040以已知的方式可操作地耦接到计算机系统1030的处理器1032,以允许用户直接与计算机系统1030交互。hmi 1040可以包括视频或字母数字显示器、触摸屏、扬声器、以及能够向用户提供数据的任何其它合适的音频和视觉指示器。hmi 1040还包括输入装置和控制器,该输入装置和控制器诸如能够从用户接受命令或输入并将键入的输入传输到处理器1032的字母数字键盘、指点装置、小键盘、按钮、控制旋钮、麦克风等。
[0057]
数据库1044可以驻留在大容量存储存储器装置1036上,并且可以用于收集和组织由本文描述的各种系统和模块使用的数据。数据库1044可以包括数据以及存储和组织数据的支持数据结构。具体地,数据库1044可以布置有任何数据库组织或结构,包括但不限于关系数据库、分层数据库、网络数据库、或其组合。以在处理器1032上作为指令执行的计算机软件应用程序形式的数据库管理系统可用于响应于查询来访问存储在数据库1044的记录中的信息或数据,其中查询可由操作系统1046、其它应用程序1048、或一个或多个模块动态地确定和执行。
[0058]
此外,本公开包括根据以下项的实施例:
[0059]
项1.一种驻车制动系统,包括一个或多个压力换能器,该压力换能器监测驻车制动系统的流体压力,该驻车制动系统包括:
[0060]
制动选择装置,被配置为指示驻车制动系统处于接合状态或脱离状态;
[0061]
一个或多个处理器,与制动选择装置和一个或多个压力换能器电子通信;以及
[0062]
存储器,耦接到一个或多个处理器,该存储器存储包括数据库和程序代码的数据,该程序代码在被一个或多个处理器执行时,使驻车制动系统:
[0063]
接收指示驻车制动系统正置于接合状态的多个制动信号;
[0064]
响应于接收到多个制动信号,监测一个或多个压力换能器以确定驻车制动系统的流体压力;
[0065]
确定驻车制动系统的流体压力小于阈值压力;并且
[0066]
响应于确定驻车制动系统的流体压力小于阈值压力,命令制动选择装置指示驻车制动系统处于脱离状态。
[0067]
项2.根据项1所述的驻车制动系统,还包括驻车制动阀,该驻车制动阀被配置成维持驻车制动系统的流体压力,其中,一个或多个处理器执行指令以:
[0068]
响应于接收到多个制动信号,命令驻车制动阀从打开位置移动到关闭位置。
[0069]
项3.根据项2所述的驻车制动系统,其中,一个或多个处理器执行指令以:
[0070]
响应于确定驻车制动系统的流体压力小于阈值压力,指示驻车制动阀移回打开位置。
[0071]
项4.根据项1所述的驻车制动系统,其中,一个或多个处理器执行指令以:
[0072]
确定驻车制动系统的流体压力等于或大于阈值压力;并且
[0073]
响应于确定驻车制动系统的流体压力等于或大于阈值压力,继续命令制动选择装置指示驻车制动系统处于接合状态。
[0074]
项5.根据项1所述的驻车制动系统,还包括定位在汽缸内的力构件。
[0075]
项6.根据项5所述的驻车制动系统,其中,阈值压力指示驻车制动系统的流体压力足以在预定的时间量内将力构件保持在汽缸内的适当位置。
[0076]
项7.根据项1所述的驻车制动系统,还包括多个制动踏板,该多个制动踏板与一个或多个处理器连通,其中,多个制动踏板被配置成响应于被踩下而生成踩下信号。
[0077]
项8.根据项7所述的驻车制动系统,其中,制动选择装置被配置成响应于被置于接合状态而生成设定信号。
[0078]
项9.根据项8所述的驻车制动系统,其中,多个制动信号包括由制动选择装置生成的设定信号和由多个制动踏板生成的踩下信号。
[0079]
项10.一种操作驻车制动系统的方法,其中,驻车制动系统包括制动选择装置,该制动选择装置配置成指示驻车制动系统处于接合状态或脱离状态,该方法包括:
[0080]
通过计算机接收指示驻车制动系统正置于接合状态的多个制动信号;
[0081]
响应于接收到多个制动信号,监测一个或多个压力换能器以确定驻车制动系统的流体压力;
[0082]
确定驻车制动系统处的流体压力小于阈值压力;并且
[0083]
响应于确定驻车制动系统的流体压力小于阈值压力,命令制动选择装置指示驻车制动系统处于脱离状态。
[0084]
项11.根据项10所述的方法,还包括:
[0085]
响应于接收到多个制动信号,命令驻车制动阀从打开位置移动到关闭位置,其中,驻车制动阀被配置成维持驻车制动系统的流体压力。
[0086]
项12.根据项10所述的方法,还包括:
[0087]
通过计算机确定驻车制动系统的流体压力等于或大于阈值压力;并且
[0088]
响应于确定驻车制动系统的流体压力等于或大于阈值压力,继续命令制动选择装置指示驻车制动系统处于接合状态。
[0089]
项13.根据项10所述的方法,其中,多个制动信号包括由制动选择装置生成的设定信号和由作为驻车制动系统的部分的多个制动踏板生成的踩下信号。
[0090]
项14.根据项10所述的方法,其中,驻车制动系统还包括定位在汽缸内的力构件,并且其中,阈值压力指示驻车制动系统的流体压力足以在预定的时间量内将力构件保持在汽缸内的适当位置。
[0091]
项15.一种飞行器,具有驻车制动系统,其中,该飞行器包括:
[0092]
多个踏板,被配置成生成制动信号,其中,制动信号指示多个踏板被踩下;
[0093]
驻车制动阀,被配置为调节供应至驻车制动系统的液压;
[0094]
一个或多个压力换能器,监测驻车制动系统的液压;
[0095]
制动选择装置,被配置成响应于被置于接合状态而生成设定信号,其中,制动选择装置指示驻车制动系统处于接合状态或脱离状态;
[0096]
一个或多个处理器,与制动选择装置、驻车制动阀、多个踏板、以及一个或多个压力换能器电子通信;以及
[0097]
存储器,耦接到一个或多个处理器,存储器存储包括数据库和程序代码的数据,该程序代码在被一个或多个处理器执行时,使驻车制动系统:
[0098]
接收来自制动选择装置的设定信号和来自多个踏板的制动信号;
[0099]
响应于接收到来自制动选择装置的设定信号和来自多个踏板的制动信号,监测一个或多个压力换能器以确定驻车制动系统的液压;
[0100]
确定驻车制动系统的液压小于阈值压力;并且
[0101]
响应于确定驻车制动系统的液压小于阈值压力,命令制动选择装置指示驻车制动系统处于脱离状态。
[0102]
项16.根据项15所述的飞行器,其中,一个或多个处理器执行指令以:
[0103]
响应于接收到来自制动选择装置的设定信号和来自多个踏板的制动信号,命令驻车制动阀从打开位置移动到关闭位置。
[0104]
项17.根据项16所述的飞行器,其中,一个或多个处理器执行指令以:
[0105]
响应于确定驻车制动系统的液压小于阈值压力,命令驻车制动阀移回到打开位置。
[0106]
项18.根据项15所述的飞行器,其中,一个或多个处理器执行指令以:
[0107]
确定驻车制动系统的液压等于或大于阈值压力;并且
[0108]
响应于确定驻车制动系统的液压等于或大于阈值压力,继续命令制动选择装置指示驻车制动系统处于接合状态。
[0109]
项19.根据项15所述的飞行器,还包括力构件,该力构件定位在汽缸内,其中,驻车
制动阀流体连接至该汽缸。
[0110]
项20.根据项19所述的飞行器,其中,阈值压力指示驻车制动阀处的液压足以在预定的时间量内将力构件保持在汽缸内的适当位置。
[0111]
项21.一种驻车制动系统,包括被配置为维持驻车制动系统的流体压力的驻车制动阀和一个或多个压力换能器,该压力换能器监测驻车制动系统的流体压力,该驻车制动系统包括:
[0112]
双稳态控制阀,流体连接到驻车制动阀,其中,双稳态控制阀被配置成在打开位置与关闭位置之间致动;
[0113]
一个或多个处理器,与双稳态控制阀、驻车制动阀、以及一个或多个压力换能器电子通信;并且
[0114]
存储器,耦接到一个或多个处理器,存储器存储包括数据库和程序代码的数据,该程序代码在被一个或多个处理器执行时,使驻车制动系统:
[0115]
接收指示用户正在接合驻车制动系统的多个制动信号;
[0116]
响应于接收到多个制动信号,监测一个或多个压力换能器以确定驻车制动系统的流体压力;
[0117]
确定驻车制动系统的流体压力小于阈值压力;并且
[0118]
响应于确定驻车制动系统的流体压力小于阈值压力,命令双稳态控制阀致动到打开位置。
[0119]
项22.根据项21所述的驻车制动系统,还包括回流压力导管,该回流压力导管流体连接到驻车制动阀。
[0120]
项23.根据项22所述的驻车制动系统,其中,双稳态控制阀在置于关闭位置时流体连接到驻车制动系统的回流压力导管。
[0121]
项24.根据项21所述的驻车制动系统,还包括供应压力导管,该供应压力导管流体连接到双稳态控制阀。
[0122]
项25.根据项24所述的驻车制动系统,还包括制动管路导管,其中,双稳态控制阀处于打开位置时,将制动管路导管与供应压力导管流体连接。
[0123]
项26.根据项21所述的驻车制动系统,其中,一个或多个处理器执行指令以:
[0124]
响应于接收到多个制动信号,命令驻车制动阀关闭并阻断驻车制动系统的回流压力导管。
[0125]
项27.根据项21所述的驻车制动系统,其中,双稳态控制阀是机械操作的液压控制阀。
[0126]
项28.根据项21所述的驻车制动系统,还包括力构件,该力构件定位在汽缸内,其中,驻车制动阀流体连接至该汽缸。
[0127]
项29.根据项28所述的驻车制动系统,其中,阈值压力指示驻车制动器处的流体压力足以在预定的时间量内将力构件保持在适当位置。
[0128]
项30.根据项21所述的驻车制动系统,还包括多个制动踏板,该多个制动踏板与一个或多个处理器连通,其中,多个制动踏板被配置成响应于被踩下而生成踩下信号。
[0129]
项31.根据项30所述的驻车制动系统,还包括制动选择装置,其中,制动选择装置被配置成响应于被置于接合状态而生成设定信号。
[0130]
项32.根据项31所述的驻车制动系统,其中,多个制动信号包括由制动选择装置生成的设定信号和由多个制动踏板生成的踩下信号。
[0131]
项33.一种操作驻车制动系统的方法,其中,驻车制动系统包括驻车制动阀和流体连接到驻车制动阀的双稳态控制阀,其中,该方法包括:
[0132]
由计算机接收指示驻车制动系统正置于接合状态的多个制动信号;
[0133]
响应于接收到多个制动信号,监测一个或多个压力换能器以确定驻车制动系统的流体压力,其中,一个或多个压力换能器监测驻车制动系统的流体压力;
[0134]
确定驻车制动系统的流体压力小于阈值压力;并且
[0135]
响应于确定驻车制动系统的流体压力小于阈值压力,命令双稳态控制阀从关闭位置致动到打开位置。
[0136]
项34.根据项33所述的方法,还包括:
[0137]
响应于接收到多个制动信号,命令驻车制动阀关闭并阻断驻车制动系统的回流压力导管。
[0138]
项35.根据项33所述的方法,还包括:
[0139]
通过计算机确定驻车制动系统的流体压力等于或大于阈值压力;并且
[0140]
响应于确定驻车制动系统的流体压力等于或大于阈值压力,继续命令双稳态控制阀保持在打开位置。
[0141]
项36.一种飞行器,具有驻车制动系统,其中,该飞行器包括:
[0142]
驻车制动阀,被配置成维持驻车制动系统的液压;
[0143]
一个或多个压力换能器,监测驻车制动系统的液压;
[0144]
双稳态控制阀,流体连接到驻车制动阀,其中,双稳态控制阀被配置成在打开位置与关闭位置之间致动;
[0145]
一个或多个处理器,与双稳态控制阀、驻车制动阀、以及一个或多个压力换能器电子通信;并且
[0146]
存储器,耦接到一个或多个处理器,存储器存储包括数据库和程序代码的数据,当程序代码被一个或多个处理器执行时,使驻车制动系统:
[0147]
接收指示用户正在接合驻车制动系统的多个制动信号;
[0148]
响应于接收到多个制动信号,监测一个或多个压力换能器以确定驻车制动系统的液压;
[0149]
确定驻车制动系统的液压小于阈值压力;并且
[0150]
响应于确定驻车制动系统的液压小于阈值压力,命令双稳态控制阀致动到打开位置。
[0151]
项37.根据项36所述的飞行器,还包括回流压力导管,该回流压力导管流体连接到驻车制动阀,其中,双稳态控制阀在置于关闭位置时,流体连接到驻车制动系统的回流压力导管。
[0152]
项38.根据项36所述的飞行器,其中,一个或多个处理器执行指令以:
[0153]
响应于接收到多个制动信号,命令驻车制动阀关闭并阻断驻车制动系统的回流压力导管。
[0154]
项39.根据项36所述的飞行器,其中,双稳态控制阀是机械操作的液压控制阀。
[0155]
项40.根据项36所述的飞行器,还包括力构件,该力构件定位在汽缸内,其中,驻车制动阀流体连接到该汽缸,并且其中,阈值压力指示驻车制动系统的液压足以在预定的时间量内将力构件保持在汽缸内的适当位置。
[0156]
本公开的描述在本质上仅仅是示例性的,并且不脱离本公开的要旨的变化旨在在本公开的范围内。这种变化不应被视为背离本公开的精神和范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips