
 商标分类
商标分类  商标转让
商标转让 
一种多功能无人机的制作方法
 2021-02-12 23:02:12|
2021-02-12 23:02:12| 225|
225| 起点商标网
起点商标网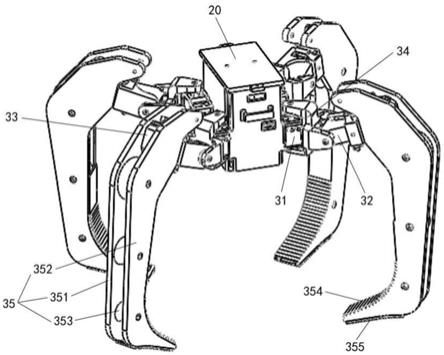
[0001]
本发明涉及无人机的技术领域,特别涉及一种多功能无人机。
背景技术:
[0002]
无人机行业的逐步壮大,技术也在大跨步的发展,使得无人机应用领域越来越广泛,在军事应用领域无人机主要用作有靶机、战略侦察机、战略攻击机等,从技术角度划分,包括固定翼无人机、旋翼无人机、多旋翼无人机、无人伞翼机及无人飞艇等。由于旋翼无人机机械机构和动力系统简单,诸多爱好者纷纷开始研究和使用。
[0003]
常见的旋翼无人机主要发展方向有编队飞行、航拍航测、巡航搜救、高空检测等方向。因单纯的旋翼无人机主要功能是飞行,因此也受到了很大的局限性。近年来跨领域的结合打破了这一瓶颈,增加无人机的应用场景、扩展能力,增加了无限的可能性。
[0004]
作业型飞行机器人是面向空中自主作业需求,将旋翼无人机与机械臂、机械手爪等执行机构相结合所提出的新型机器人,相比传统的旋翼无人机,作业型飞行机器人根据具体所搭载的执行器的功能,能在复杂的环境中执行多样的任务,使其与环境交互能力大大提高,具有广泛的应用前景。
[0005]
上述发明所述多旋翼飞行器模块只负责飞行和平整地面支撑的作用,缺少了多地形适应的灵活性、机动性。由于每次变换位置都需要无人机的飞起,再找到对应的位置降落,操作难度大大增加,效率低下。
技术实现要素:
[0006]
本发明的目的在于提供一种多功能无人机,以解决现有无人机功能单一的问题。
[0007]
为了解决上述技术问题,本发明提供了一种多功能无人机,包括飞行器、控制器和抓爬单元;所述控制器设于所述飞行器的底部,所述控制器连接控制多个所述抓爬单元,多个所述抓爬单元设于所述控制器的外部;所述抓爬单元包括行走电机、夹取电机、联动支架和手爪;所述行走电机设于所述控制器上,所述行走电机与所述联动支架联动连接,所述夹取电机联动连接于所述联动支架上,所述手爪与所述夹取电机连接;所述行走电机的转动用于带动所述联动支架和所述手爪在水平方向翻转,以实现所述手爪的爬行操作;所述夹取电机的转轴与所述行走电机的转轴相互垂直,所述夹取电机的转动用于带动所述手爪在竖直方向翻转,以实现所述手爪的夹取操作。
[0008]
在其中一个实施例中,所述联动支架包括第一匚形部和第二匚形部,所述第一匚形部与所述第二匚形部背对且垂直连接;所述行走电机设于所述第一匚形部包围的范围内,所述行走电机与所述第一匚形部联动连接;所述夹取电机设于所述第二匚形部包围的范围内,所述夹取电机与所述第二匚形部联动连接。
[0009]
在其中一个实施例中,所述抓爬单元还包括调整电机,所述调整电机设于所述手爪上,所述调整电机与所述夹取电机联动连接,所述调整电机的转动中心与所述行走电机和所述夹取电机的转动中心垂直,所述调整电机的转动用于带动所述手爪翻转。
[0010]
在其中一个实施例中,所述手爪包括第一爪板、第二爪板和多个连接柱,所述第一爪板与所述第二爪板分离相对布置,多个所述连接柱均设于所述第一爪板与所述第二爪板之间,所述第一爪板和所述第二爪板均与多个所述连接柱连接固定。
[0011]
在其中一个实施例中,所述调整电机设于所述第一爪板与所述第二爪板之间。
[0012]
在其中一个实施例中,所述手爪的内表面设有软胶垫。
[0013]
在其中一个实施例中,所述手爪的外表面设有硬胶垫。
[0014]
在其中一个实施例中,所述控制器与多种不同规格的所述飞行器之间为可拆卸式连接。
[0015]
在其中一个实施例中,所述控制器相对的两侧各设有两个所述抓爬单元。
[0016]
本发明的有益效果如下:
[0017]
由于所述行走电机的转动用于带动所述联动支架和所述手爪在水平方向翻转,以实现所述手爪的爬行操作,所述夹取电机的转动用于带动所述手爪在竖直方向翻转,以实现所述手爪的夹取操作,从而使得无人机能够实现物件抓取、爬行、以及利用手爪的夹持功能栖息在树枝或支撑架上等,切实解决了现有无人机功能单一的问题。
附图说明
[0018]
为了更清楚地说明本发明的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0019]
图1是本发明多功能无人机实施例提供的组装箱的结构示意图;
[0020]
图2是图1的物件夹取状态示意图;
[0021]
图3是图1的栖息树干状态示意图;
[0022]
图4是图1的爬行状态示意图;
[0023]
图5是图1的抓爬单元结构示意图;
[0024]
图6是图1的控制器与抓爬单元组装状态示意图。
[0025]
附图标记如下:
[0026]
10、飞行器;
[0027]
20、控制器;
[0028]
30、抓爬单元;31、行走电机;32、夹取电机;33、调整电机;34、联动支架;341、第一匚形部;342、第二匚形部;35、手爪;351、第一爪板;352、第二爪板;353、连接柱;354、软胶垫;355、硬胶垫。
具体实施方式
[0029]
下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述。
[0030]
本发明提供了一种多功能无人机,其实施例如图1至图6所示,包括飞行器10、控制器20和抓爬单元30;控制器20设于飞行器10的底部,控制器20连接控制多个抓爬单元30,多个抓爬单元30设于控制器20的外部;抓爬单元30包括行走电机31、夹取电机32、联动支架34和手爪35;行走电机31设于控制器20上,行走电机31与联动支架34联动连接,夹取电机32联
动连接于联动支架34上,手爪35与夹取电机32连接;行走电机31的转动用于带动联动支架34和手爪35在水平方向翻转,以实现手爪35的爬行操作;夹取电机32的转轴与行走电机31的转轴相互垂直,夹取电机32的转动用于带动手爪35在竖直方向翻转,以实现手爪35的夹取操作。
[0031]
在进行应用时,飞行器10用于带动控制器20和抓爬单元30飞行,若需要进行物件的抓取,控制器20则可控制夹取电机32带动手爪35往内翻转,多个手爪35向内收拢从而实现对物件的夹持,而在需要放下物件时,控制器20则可控制夹取电机32带动手爪35往外翻转,多个手爪35相互散开以实现物件的下放。
[0032]
在需要控制多功能无人机进行爬行时,控制器20则可控制行走电机31带动手爪35进行前后交替移动,从而使得多个手爪35能够实现爬行姿态的模拟,以满足特殊情况的使用需求,譬如此时将会便于无人机在近距离的战略侦察中利用爬行替代飞行,以降低被发现的风险。
[0033]
如图3所示,由于多个手爪35能够变为收拢状态,所以也可以利用此状态对树枝或支撑架进行夹持,以便于无人机栖息于树枝或支撑架上,即实现了无人机应对不同使用环境的临时停放需求。
[0034]
如图5和图6所示,联动支架34包括第一匚形部341和第二匚形部342,第一匚形部341与第二匚形部342背对且垂直连接;行走电机31设于第一匚形部341包围的范围内,行走电机31与第一匚形部341联动连接;夹取电机32设于第二匚形部342包围的范围内,夹取电机32与第二匚形部342联动连接。
[0035]
在采用此结构后,行走电机31的转轴可与第一匚形部341的侧壁连接,以实现行走电机31带动联动支架34转动的目的,夹取电机32的转轴可与第二匚形部342的侧壁连接,以实现夹取电机32带动手爪35转动的目的;而且在确保对手爪35操控得以实现的前提下,行走电机31收纳于第一匚形部341内,夹取电机32收纳于第二匚形部342内,也提高了产品的结构紧凑性。
[0036]
如图5所示,抓爬单元30还包括调整电机33,调整电机33设于手爪35上,调整电机33与夹取电机32联动连接,调整电机33的转动中心与行走电机31和夹取电机32的转动中心垂直,调整电机33的转动用于带动手爪35翻转。
[0037]
以图1所示方向为参考,所以当调整电机33进行转动时,手爪35将以调整电机33的转轴为旋转中心实现在竖直平面上的转动,从而实现手爪35第三个维度的调整控制,便于调整手爪35的各种翻转角度以适应不同的使用需求。
[0038]
如图6所示,手爪35包括第一爪板351、第二爪板352和多个连接柱353,第一爪板351与第二爪板352分离相对布置,多个连接柱353均设于第一爪板351与第二爪板352之间,第一爪板351和第二爪板352均与多个连接柱353连接固定。
[0039]
在采用此结构后,第一爪板351与第二爪板352之间将会存在较多的镂空区域,即此结构在保证了手爪35的机械强度的前提下,实现了手爪35重量的减轻,从而减少了飞行器10负载重量,为无人机进行更长时间的持久飞行提供了帮助。
[0040]
如图6所示,调整电机33设于第一爪板351与第二爪板352之间。
[0041]
在采用此结构后,不但便于调整电机33的收纳,而且第一爪板351和第二爪板352也能对调整电机33进行围纳保护,从而使得无人机的设计更为合理稳固。
[0042]
如图6所示,手爪35的内表面设有软胶垫354。
[0043]
所以当利用手爪35对物件进行夹持时,软胶垫354可通过与物件的接触增强夹持力,而且软胶垫354也不容易对物件造成损伤。
[0044]
如图6所示,手爪35的外表面设有硬胶垫355。
[0045]
所以在利用手爪35进行爬行操作时,硬胶垫355将可加强与地面之间的接触,防止出现爬行打滑的现象,而且硬胶垫355的耐磨性较强,也为手爪35进行爬行的使用寿命提供了保障。
[0046]
优选的,控制器20与多种不同规格的飞行器10之间为可拆卸式连接。
[0047]
譬如飞行器10具有四旋翼、五旋翼和六旋翼等多种规格,在场景a可以利用四旋翼的飞行器10与控制器20安装固定进行使用,在b场景可以利用五旋翼的飞行器10与控制器20安装固定进行使用,以此使得无人机的使用范围更广。
[0048]
如图6所示,控制器20相对的两侧各设有两个抓爬单元30。
[0049]
即控制器20总共连接有四个抓爬单元30,以此通过较少的抓爬单元30实现了较佳的应用效果。
[0050]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips