
 商标分类
商标分类  商标转让
商标转让 
一种舵机驱动的可升降吊舱的制作方法
 2021-02-12 23:02:29|
2021-02-12 23:02:29| 65|
65| 起点商标网
起点商标网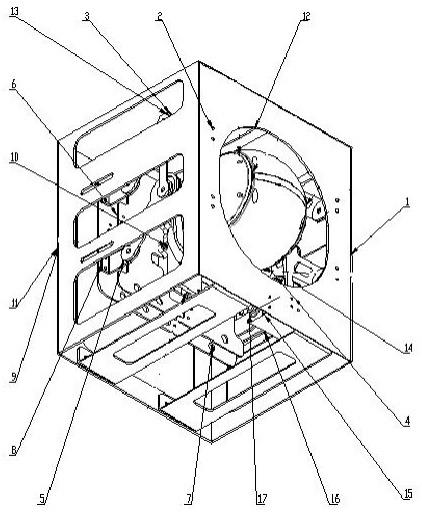
[0001]
本实用新型涉及无人机设备技术领域,具体为一种舵机驱动的可升降吊舱。
背景技术:
[0002]
随着科学技术的发展,无人机的地位也在逐渐提高。无人机在工业领域扮演着越来越重要的作用,比如测绘,航拍,侦查等。
[0003]
但是,现有的吊舱存在以下缺点:
[0004]
但是无人机本身机身很轻,航时也和传统飞机无法相比,如果要携带挂在机身下边的激光吊舱,相机等,必然要安装一个起落架,因为吊舱不能去接触地面,可是加上起落架以后,机身垂直地面方向所占的空间会大幅度提高。
技术实现要素:
[0005]
本实用新型的目的在于提供一种舵机驱动的可升降吊舱,以解决上述背景技术中但是无人机本身机身很轻,航时也和传统飞机无法相比,如果要携带挂在机身下边的激光吊舱,相机等,必然要安装一个起落架,因为吊舱不能去接触地面,可是加上起落架以后,机身垂直地面方向所占的空间会大幅度提高的问题。
[0006]
为实现上述目的,本实用新型提供如下技术方案:一种舵机驱动的可升降吊舱,包括吊舱底板、铝制底座、侧板和框架顶板,所述吊舱底板两端侧壁固定焊接有侧板,所述吊舱底板两侧壁表面固定焊接有铝制底座,所述吊舱底板上方固定通过侧板和铝制底座焊接有框架顶板,所述吊舱底板、铝制底座、侧板和框架顶板相互配合可拼接成矩形护架结构,且矩形护架结构内腔固定安装有铝制上座,所述铝制上座共设置有两组,所述铝制上座内腔底部固定安装有吊舱下板,所述吊舱下板上方固定安装有吊舱上板,且吊舱上板和吊舱下板相互配合,两组所述铝制上座一端分别通过转轴活动连接有一号后摇臂和二号后摇臂,所述一号后摇臂和二号后摇臂另一端分别通过转轴活动安装有无刷吊舱,吊舱底板、铝制底座、侧板和框架顶板相互配合可拼接成矩形护架结构,将矩形护架结构通过螺栓固定安装在无人机的机腹内腔,其中矩形护架结构内腔通过螺栓固定安装有铝制上座,铝制上座共设置有两组,铝制上座内腔底部固定安装有吊舱下板,吊舱下板上方固定安装有吊舱上板,且吊舱上板和吊舱下板相互配合,两组铝制上座一端分别通过转轴活动连接有一号后摇臂和二号后摇臂,一号后摇臂和二号后摇臂另一端分别通过转轴活动安装有无刷吊舱,两组铝制上座另一端分别通过转轴活动连接有连接杆和马蹄形拉环,连接杆和马蹄形拉环另一端分别与一号后摇臂和二号后摇臂另一端活动相连,同时矩形护架结构内腔一端安装有铝制固定架,铝制固定架内腔固定安装有空杯舵机,空杯舵机动力输出端固定连接有舵机摇臂,舵机摇臂另一端通过转轴与无刷吊舱活动相连,空杯舵机驱动舵机摇臂进行转动,舵机摇臂另一端可带动无刷吊舱在一号后摇臂和二号后摇臂与连接杆和马蹄形拉环的引导下使传感器从通孔内伸出矩形护架,在使用结束后,空杯舵机反向旋转,即可在一号后摇臂和二号后摇臂与连接杆和马蹄形拉环的引导下使传感器缩进矩形护架内腔,通过矩
形护架对传感器进行保护,可有效避免无人机在降落时造成传感器对地面发生接触,提升对传感器的保护效果。
[0007]
优选的,两组所述铝制上座另一端分别通过转轴活动连接有前摇臂,且前摇臂另一端均通过转轴活动连接有连接杆和马蹄形拉环,通过连接杆和马蹄形拉环与一号后摇臂和二号后摇臂相互配合可使无刷吊舱进行弧形翻转运动。
[0008]
优选的,所述连接杆和马蹄形拉环另一端分别与一号后摇臂和二号后摇臂另一端活动相连,通过连接杆和马蹄形拉环与一号后摇臂和二号后摇臂相互配合可使无刷吊舱进行弧形翻转运动。
[0009]
优选的,所述铝制底座表面中部固定开设有通孔,且通孔为圆形结构,通过通孔可方便无刷吊舱进行弧形翻转时进出矩形护架。
[0010]
优选的,所述侧板内壁表面固定安装有铝制固定架,所述铝制固定架内腔固定安装有空杯舵机,所述空杯舵机动力输出端固定连接有舵机摇臂,所述舵机摇臂另一端通过转轴与无刷吊舱活动相连,通过铝制固定架可对空杯舵机进行安装,空杯舵机可通过舵机摇臂对空杯舵机进行驱动。
[0011]
优选的,所述无刷吊舱内腔通过转轴活动安装有传感器,通过传感器可对拍照或信息的采集。
[0012]
本实用新型提供了一种舵机驱动的可升降吊舱,具备以下有益效果:
[0013]
1、本实用新型空杯舵机动力输出端固定连接有舵机摇臂,舵机摇臂另一端通过转轴与无刷吊舱活动相连,空杯舵机驱动舵机摇臂进行转动,舵机摇臂另一端可带动无刷吊舱在一号后摇臂和二号后摇臂与连接杆和马蹄形拉环的引导下使传感器从通孔内伸出矩形护架,在使用结束后,空杯舵机反向旋转,即可在一号后摇臂和二号后摇臂与连接杆和马蹄形拉环的引导下使传感器缩进矩形护架内腔,通过矩形护架对传感器进行保护,可有效避免无人机在降落时造成传感器对地面发生接触,提升对传感器的保护效果。
附图说明
[0014]
图1为本实用新型的整体结构示意图;
[0015]
图2为本实用新型的无刷吊舱结构示意图;
[0016]
图3为本实用新型的无刷吊舱旋转结构示意图。
[0017]
图中:1、吊舱底板;2、铝制底座;3、前摇臂;4、一号后摇臂;5、二号后摇臂;6、吊舱下板;7、吊舱上板;8、铝制上座;9、侧板;10、无刷吊舱;11、框架顶板;12、通孔;13、连接杆;14、马蹄形拉环;15、铝制固定架;16、空杯舵机;17、舵机摇臂;18、传感器。
具体实施方式
[0018]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
[0019]
如图1-3所示,本实用新型提供一种技术方案:一种舵机驱动的可升降吊舱,包括吊舱底板1、铝制底座2、侧板9和框架顶板11,所述吊舱底板1两端侧壁固定焊接有侧板9,所述吊舱底板1两侧壁表面固定焊接有铝制底座2,所述吊舱底板1上方固定通过侧板9和铝制底座2焊接有框架顶板11,所述吊舱底板1、铝制底座2、侧板9和框架顶板11相互配合可拼接
成矩形护架结构,且矩形护架结构内腔固定安装有铝制上座8,所述铝制上座8共设置有两组,所述铝制上座8内腔底部固定安装有吊舱下板6,所述吊舱下板6上方固定安装有吊舱上板7,且吊舱上板7和吊舱下板6相互配合,两组所述铝制上座8一端分别通过转轴活动连接有一号后摇臂4和二号后摇臂5,所述一号后摇臂4和二号后摇臂5另一端分别通过转轴活动安装有无刷吊舱10,吊舱底板1、铝制底座2、侧板9和框架顶板11相互配合可拼接成矩形护架结构,将矩形护架结构通过螺栓固定安装在无人机的机腹内腔,其中矩形护架结构内腔通过螺栓固定安装有铝制上座8,铝制上座8共设置有两组,铝制上座8内腔底部固定安装有吊舱下板6,吊舱下板6上方固定安装有吊舱上板7,且吊舱上板7和吊舱下板6相互配合,两组铝制上座8一端分别通过转轴活动连接有一号后摇臂4和二号后摇臂5,一号后摇臂4和二号后摇臂5另一端分别通过转轴活动安装有无刷吊舱10,两组铝制上座8另一端分别通过转轴活动连接有连接杆13和马蹄形拉环14,连接杆13和马蹄形拉环14另一端分别与一号后摇臂4和二号后摇臂5另一端活动相连,同时矩形护架结构内腔一端安装有铝制固定架15,铝制固定架15内腔固定安装有空杯舵机16,空杯舵机16动力输出端固定连接有舵机摇臂17,舵机摇臂17另一端通过转轴与无刷吊舱10活动相连,空杯舵机16驱动舵机摇臂17进行转动,舵机摇臂17另一端可带动无刷吊舱10在一号后摇臂4和二号后摇臂5与连接杆13和马蹄形拉环14的引导下使传感器18从通孔12内伸出矩形护架,在使用结束后,空杯舵机16反向旋转,即可在一号后摇臂4和二号后摇臂5与连接杆13和马蹄形拉环14的引导下使传感器18缩进矩形护架内腔,通过矩形护架对传感器18进行保护,可有效避免无人机在降落时造成传感器18对地面发生接触,提升对传感器18的保护效果。
[0020]
两组所述铝制上座8另一端分别通过转轴活动连接有前摇臂3,且前摇臂3另一端均通过转轴活动连接有连接杆13和马蹄形拉环14,通过连接杆13和马蹄形拉环14与一号后摇臂4和二号后摇臂5相互配合可使无刷吊舱10进行弧形翻转运动。
[0021]
所述连接杆13和马蹄形拉环14另一端分别与一号后摇臂4和二号后摇臂5另一端活动相连,通过连接杆13和马蹄形拉环14与一号后摇臂4和二号后摇臂5相互配合可使无刷吊舱10进行弧形翻转运动。
[0022]
所述铝制底座2表面中部固定开设有通孔12,且通孔12为圆形结构,通过通孔12可方便无刷吊舱10进行弧形翻转时进出矩形护架。
[0023]
所述侧板9内壁表面固定安装有铝制固定架15,所述铝制固定架15内腔固定安装有空杯舵机16,所述空杯舵机16动力输出端固定连接有舵机摇臂17,所述舵机摇臂17另一端通过转轴与无刷吊舱10活动相连,通过铝制固定架15可对空杯舵机16进行安装,空杯舵机16可通过舵机摇臂17对空杯舵机16进行驱动。
[0024]
所述无刷吊舱10内腔通过转轴活动安装有传感器18,通过传感器18可对拍照或信息的采集。
[0025]
需要说明的是,一种舵机驱动的可升降吊舱,在工作时,吊舱底板1、铝制底座2、侧板9和框架顶板11相互配合可拼接成矩形护架结构,将矩形护架结构通过螺栓固定安装在无人机的机腹内腔,其中矩形护架结构内腔通过螺栓固定安装有铝制上座8,铝制上座8共设置有两组,铝制上座8内腔底部固定安装有吊舱下板6,吊舱下板6上方固定安装有吊舱上板7,且吊舱上板7和吊舱下板6相互配合,两组铝制上座8一端分别通过转轴活动连接有一号后摇臂4和二号后摇臂5,一号后摇臂4和二号后摇臂5另一端分别通过转轴活动安装有无
刷吊舱10,两组铝制上座8另一端分别通过转轴活动连接有连接杆13和马蹄形拉环14,连接杆13和马蹄形拉环14另一端分别与一号后摇臂4和二号后摇臂5另一端活动相连,同时矩形护架结构内腔一端安装有铝制固定架15,铝制固定架15内腔固定安装有空杯舵机16,空杯舵机16动力输出端固定连接有舵机摇臂17,舵机摇臂17另一端通过转轴与无刷吊舱10活动相连,空杯舵机16驱动舵机摇臂17进行转动,舵机摇臂17另一端可带动无刷吊舱10在一号后摇臂4和二号后摇臂5与连接杆13和马蹄形拉环14的引导下使传感器18从通孔12内伸出矩形护架,在使用结束后,空杯舵机16反向旋转,即可在一号后摇臂4和二号后摇臂5与连接杆13和马蹄形拉环14的引导下使传感器18缩进矩形护架内腔,通过矩形护架对传感器18进行保护,可有效避免无人机在降落时造成传感器18对地面发生接触,提升对传感器18的保护效果。
[0026]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 舵机

 热门咨询
热门咨询




tips