
 商标分类
商标分类  商标转让
商标转让 
一种高速混合动力无人机的制作方法
 2021-02-12 22:02:22|
2021-02-12 22:02:22| 378|
378| 起点商标网
起点商标网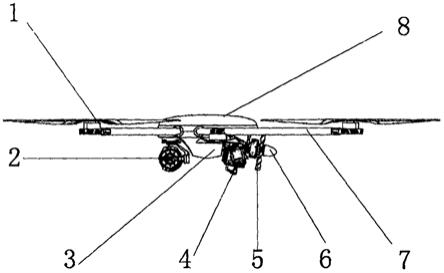
[0001]
本实用新型涉及一种无人机,尤其是一种高速混合动力无人机。
背景技术:
[0002]
现有大规模应用的无人机主要有多旋翼、固定翼和复合翼三种构型。其中,多旋翼无人机结构简单使用方便,可以垂直起降随时悬停,但飞行速度较慢抗风性能差;固定翼无人机,飞行速度快抗风性好,但是需要专用空域和起降场地不能垂直起降和随时悬停;复合翼无人机,采用多旋翼方式起飞降落固定翼方式高速巡航,但是在执行监控巡检类任务时无法长时间随时悬停对可以目标进行跟踪凝视。
[0003]
目前无人机能源方式主要有电动、太阳能电池、氢燃料电池、油动。纯电动无人机、结构简单、使用方便、动力强劲,适合小型消费级无人机使用。在大型工业级无人机领域,电动无人机续航时间短,执行一般巡检类任务时,续航时间一般不超过50分钟。航时不足极大的限制了电动无人机进一步应用;太阳能电池无人机目前还都在实验室阶段,未能大规模使用。太阳能电池板发电效率低下,目前仅能够用在高空长航时固定翼上。此种无人机受天气影响较大,抗风性能弱,日照充足的情况下可以进行长时间续航,但是飞行高度较高,阴天下雨时不能够自持飞行,不适合大规模全天候应用;氢燃料电池无人机已经问世很多年,拥有较大的能量密度和转换效率,无人机可以较长时间飞行。但是氢燃料电池采用高压碳罐存储液态氢,而氢气属于极易燃易爆气体,整个使用环节都有较高风险。此外,氢气不易制取不易存储运输,氢燃料电池无人机一直无法实用化;油动是最早出现无人机动力方式,经百年的发展已经成熟可靠,拥有航时长动力足的特点。但是油动无人机也存在震动大,驱动定距螺旋桨时需要满足各种工况使用维护复杂,限制了油动无人机大规模应用。
[0004]
现有的多旋翼无人机存在续航时间不足、油动无人机使用维护复杂、电动固定翼无人机无法随时悬停等多种缺陷。
技术实现要素:
[0005]
为了解决上述技术问题,本实用新型提供了一种高速混合动力无人机,其能够将燃油动力与电力动力的结合起来,解决了垂直起降、随时悬停与长航时、高航速的矛盾。
[0006]
本实用新型的技术方案为:
[0007]
一种高速混合动力无人机,包括机体、旋翼动力组、任务载荷、油箱、混动发动机、发电机、推进螺旋桨、电池,旋翼动力组安装机体的伸出机臂末端,任务载荷安装在机体前端下部,机体中部安装量油箱,机体后部安装混动发动机、发电机、推进螺旋桨,机体内部安装有飞控系统和电池,油箱向混动发动机提供燃油,混动发动机带动电动机和/或推进螺旋桨同轴旋转,电动机旋转发电向电池提供电力,推进螺旋桨旋转实现水平高速飞行,发电机和/或电池的电力提供给旋翼动力组,实现垂直起降和悬停。
[0008]
本实用新型的有益效果:
[0009]
本实用新型创新的采用串联混动多旋翼复合推进螺旋桨,可以在较小起降场地内
完成起降,并能够以较高航速进行巡航飞行,在发现可疑目标后还可以随时悬停,对目标进行精准锁定跟踪识别;高速混合动力无人机采用传统石化燃油飞行,拥有远超电动多旋翼无人机的航时,而且快速补充燃料后可以迅速再次起飞,连续飞行能力极强;高速混合动力无人机拥有与电动多旋翼无人机简单操作的特性,经过简单培训即可快速使用;高速混合动力无人机采用模块化设计,混动模块具有全寿命周期自动检测功能,自动提示维护时间,只需更换混动模块无人机即可正常使用,需要维护的混动模块可以返厂维护,减小了操作人员维护压力,提高了无人机系统的可靠性。
[0010]
本实用新型是油电混合动力驱动推进式高速多旋翼无人机,是一种可以垂直起降、高速巡航又可以随时悬停的多旋翼复合推进螺旋桨的无人机。采用油电混合动力为动力源,小型燃油发动机驱动发电机将化学能转化为电能驱动无人机飞行,相较于传统电动无人机拥有较高的能量密度拥有更长的航时;发动机同轴驱动多叶螺旋桨兼顾发动机、发电机散热的同时还能够产生足够的推力驱动无人机高速巡航。
[0011]
本实用新型的无人机垂直方向主要由无刷电机驱动大直径螺旋桨完成垂直起飞降落和悬停,由发动机驱动多叶推进螺旋桨提供推力进行高速巡航,无人机以正迎角高速飞行,此时气流与垂直螺旋桨呈正攻角,额外提供一部分升力;
[0012]
本实用新型采用小型航空发动机驱动发电机增加一组辅助动力电池构成串联式混动系统。工作时,辅助动力电池驱动启动器启动发动机,发动机自动热车后进入最佳工作转速带动同轴发电机发电驱动无人机飞行;
[0013]
本实用新型的混动发动机可以遥控启动,热车后自动处于最佳工作转速,不需要进行人工混合比调整,实际使用操作简便;正常飞行时,发动机始终处于最佳转速,转换效率一直维持较高水平,无人机拥有较长航时;发动机驱动同轴推进风扇相比传统多旋翼无人机拥有较高的平飞效率,加之高速飞行气流与垂直螺旋桨下洗气流耦合能够产生较大升力,进一步提高了无人机飞行效率和航时,高速混动动力无人机在水平飞行效率远超传统多旋翼无人机,特别适合需要随时悬停的长距离巡检侦查任务。
附图说明
[0014]
图1为本实用新型的无人机主视图;
[0015]
图2为本实用新型的无人机俯视图;
[0016]
图3为本实用新型的无人机立体图;
[0017]
图4为本实用新型的混动系统组成框图;
[0018]
图5为本实用新型的串联混动结构图;
[0019]
图6为本实用新型的旋翼动力组结构图;
[0020]
图中,1、旋翼动力组;2、任务载荷;3、油箱;4、混动发动机;5、发电机;6、推进螺旋桨;7、伸出机臂;8、机体;1.1、一体电机座;1.2、无刷电调;1.3、无刷电机;1.4、螺旋桨。
具体实施方式
[0021]
下面结合附图与实施例对本实用新型作进一步的说明。
[0022]
本实用新型的实施例参考图1-6所示,一种高速混合动力无人机,包括机体、旋翼动力组、任务载荷、油箱、混动发动机、发电机、推进螺旋桨、电池、旋翼动力组安装机体的伸
出机臂末端,任务载荷安装在机体前端下部,机体中部安装量油箱,机体后部安装混动发动机、发电机、推进螺旋桨,机体内部安装有飞控系统和电池,油箱向混动发动机提供燃油,混动发动机带动发电机和/或推进螺旋桨同轴旋转,发电机旋转发电向电池提供电力,推进螺旋桨旋转实现水平高速飞行,发电机和/或电池的电力提供给旋翼动力组,实现垂直起降和悬停。
[0023]
其中,旋翼动力组包括无刷电机、无刷电调、螺旋桨和一体电机座,螺旋桨安装在无刷电机输出轴上,无刷电机和无刷电调安装在一体电机座上,无刷电调为无刷电机的驱动器,通过飞控系统脉宽调制信号调整无刷电机转速,进而控制螺旋桨转速。
[0024]
其中,任务载荷为完成不同任务采用的模块化任务载荷,优选为执行昼夜巡检监控的小型三轴双光电吊舱;
[0025]
其中,混动发动机是小型航空发动机,优选为采用单缸两冲程32cc活塞式汽油机,具有功率大,重量轻等特点;
[0026]
其中,发电机是同轴安装在发动机上的永磁无刷发电机,在发动机驱动下可以提供大功率电能,驱动无人机飞行;
[0027]
其中,推进螺旋桨为同轴安装在发动机的多叶高效螺旋桨,在发动机驱动下推动无人机高速飞行,同时引射发动机气缸周围空气,达到强制风冷效果;
[0028]
其中,混动发动机、发电机、推进螺旋桨组成的串联混动结构通过减震器与机体柔性连接,无人机机身震动较小。
[0029]
其中,旋翼动力组共有六组。
[0030]
重要部件产品参数
[0031]
1旋翼动力组,采用自研8012(kv95)无刷电机,好赢80a电调,豪克29
×
9.5螺旋桨;8012无刷电机,重量460g,额定电压6-12s(18v-60v),最大功率2000w;好赢80a电调,重量85g,最大电压60.9v,最大电流80a,pwm信号3.3v/5v,信号频率50-500hz;豪克29
×
9.5螺旋桨,尺寸736.6
×
241.3mm,最大拉力32kg,转速1400-3600rpm;
[0032]
2混动模块,采用小松32发动机,9230(kv220)无刷发电机,自研多叶推力螺旋桨;小松32发动机,排量32cc,缸径
×
冲程38
×
28/mm,最大功率2.38/13000kw/rpm。重量3.5kg;9230(kv220)无刷发电机,重量560g,额定电压50v,最大功率2000w,最大电流40a;多叶推力螺旋桨,重量160g,最大工作转速15000rpm,最大推力30kg;
[0033]
本高速混合动力无人机采用串联混动多旋翼复合推进螺旋桨解决了垂直起降、随时悬停与长航时、高航速的矛盾,混动发动机驱动发电机发电,将燃油化学能转化为电能,驱动旋翼动力组完成垂直起降和随时悬停。燃油发动机能量密度高于电池,高速混合动力无人机续航时间时高于传统电动多旋翼无人机。此外,发动机驱动推进螺旋桨实现高速巡航,高速混合动力无人机巡航速度远高于传统电动多旋翼无人机。备用电池与发电机连接,正常巡航时发电机提供电力供应,当时瞬间大电流时,电池瞬间放电保证无人机瞬间大功率输出。当无人机突然减速时,发动机来不及降转速此时发电电压较高,备用电池自动充电,稳定峰值电压,保证其他用电器安全,反向电动势还可以起到刹车作用快速降低发动机转速。
[0034]
本高速混合动力无人机能够在较小起降场地内完成起降,并能够以较高航速进行巡航飞行,在发现可疑目标后还可以随时悬停,对目标进行精准锁定跟踪识别,无人机垂直
起降和悬停时,主要使用备用电池,混动发电机采取低速发电补充,高速飞行时主要使用混动发动机发电并提供巡航推力,备用电池进行补电,随时悬停时主要使用混动发动机发电,备用电池进行补充;无人机起飞瞬间电流较大,备用高倍率电池能够满足起飞瞬间大电流要求;无人机离地到达安全高度后,混动发动机开始大动力输出,推进螺旋桨提供较大推力,此时无人机采取斜坡爬升飞行模式,无人机保持一定爬升角飞行;无人机爬升至目标高度后,无人机进入巡航模式,此时混动发动机驱动推进螺旋桨提供巡航推力,混动发动机驱动发电机提供旋翼动力组垂直升力和调姿动力;巡航过程中随时悬停时,高速混动无人机大迎角刹车减速,此时混动发动机减小输出功率,当时无人机减速至悬停时,无人机保持一定打迎角状态,推力螺旋桨推力与多旋翼动力组合力水平方向分力相互抵消,垂直方向上合成并抵消高速无人机重力,保持悬停;高速混动无人机降落时,飞行轨迹与起飞轨迹类似,无人机先斜坡降高,到达降落点后混动发动机进入怠速模式,备用电池提供多旋翼动力组悬停电力,无人机缓慢垂直降落。
[0035]
以上所述实施方式仅表达了本实用新型的一种实施方式,但并不能因此而理解为对本实用新型范围的限制。应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips