
 商标分类
商标分类  商标转让
商标转让 
一种分体式混合动力车辆平台结构的制作方法
 2021-02-07 16:02:18|
2021-02-07 16:02:18| 280|
280| 起点商标网
起点商标网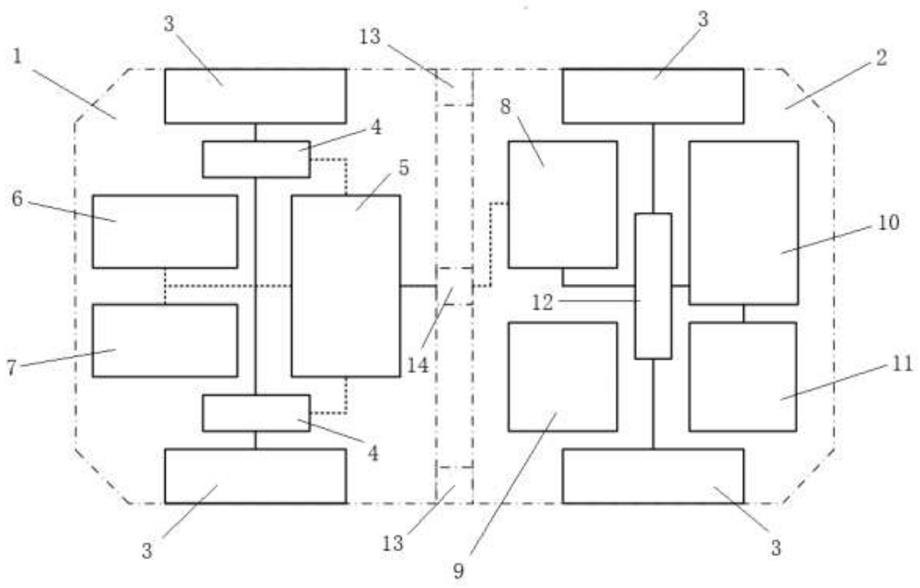
[0001]
本实用新型涉及车辆结构设计领域,特别是涉及一种分体式混合动力车辆平台结构。
背景技术:
[0002]
随着汽车产业的发展,越来越多的特种车辆被设计制造出来,以满足各种各样的任务需求。在反恐防暴、应急救援、疫情防控等领域由于可能对人身安全造成危险,不适宜由驾驶员进入任务区域。此外,在抢险、消防等任务情境下,空间经常狭窄拥挤,容不下大型特种车辆通行。
技术实现要素:
[0003]
实用新型目的:针对上述现有技术,提供一种分体式混合动力车辆平台结构,一方面其可以使驾驶员远离危险区域执行任务,另一方面采用分体式的设计可以降低对任务区域的空间要求。
[0004]
为实现上述目的,本实用新型采用如下技术方案:
[0005]
一种分体式混合动力车辆平台结构,包括首尾可拆卸式连接的任务模块和保障模块,以及连接所述任务模块和保障模块的分离连接机构;所述分离连接机构包括分别固定于任务模块和保障模块上的相互配合的牵引对接杆和牵引对接锥,所述牵引对接锥内设有可弹出或收起的电控锁止机构,所述对接杆上设有与所述电控锁止机构匹配的凹陷部,电控锁止机构弹出时可嵌入凹陷部内使任务模块和保障模块相互连接;所述任务模块设有行驶系统,保障模块设有远程控制系统,行驶系统、电控锁止机构分别与远程控制系统无线通讯,远程控制系统控制行驶系统和电控锁止机构。
[0006]
进一步的,所述分离连接机构有四个,四个对接杆分别固定于任务模块头部的左上、左下、右上、右下位置,四个对接锥固定于保障模块尾部的左上、左下、右上、右下位置。
[0007]
进一步的,还包括电能传递接口;所述电能传递接口包括插头、插座,插座布置于任务模块头部的中间位置,插头布置于第保障模块尾部的中间位置。
[0008]
进一步的,所述任务模块上载有蓄电池,保障模块上载有发动机、发电机和动能转换机构,动能转换机构分别连接发动机和发电机,发动机带动发电机发电,所述发动机连接所述插座,所述蓄电池连接所述插头。
[0009]
进一步的,还包括视觉传感器对接定位系统,所述视觉传感器对接定位系统包括视觉传感器与定位标识,分别位于牵引对接杆的头部与牵引对接锥的基座中心;所述视觉传感器无线连接远程控制系统;视觉传感器将所采集图像传送给远程控制系统,远程控制系统根据图像向任务模块发送移动命令,使牵引对接杆和牵引对接锥对准,当牵引对接杆和牵引对接锥对接到位后,远程控制系统向电控锁止机构发送弹出命令,当任务模块和保障模块需要分离时,远程控制系统向电控锁止机构发送收起命令。
[0010]
进一步的,所述保障模块装配有发动机,所述任务模块装配有电动轮,电动轮装配
有轮毂电机;任务模块和保障模块相连时由保障模块中的发动机作为动力的输入源;任务模块和保障模块分离时,任务模块通过轮毂电机驱动电动轮作为动力的输入源;
[0011]
有益效果:1、采用分体式混合动力车辆平台结构一方面其可以使驾驶员远离危险区域执行任务,另一方面采用分体式的设计可以降低对任务区域的空间要求。
[0012]
2、连接任务模块和保障模块的分离连接机构方便连接和控制。
[0013]
3、视觉传感器对接定位系统定位方便,操作简单。
附图说明
[0014]
图1为该车辆平台的三维示意图;
[0015]
图2为该车辆平台的平面示意图;
[0016]
图3为该车辆平台的牵引锁止结构示意图;
[0017]
图中标号:1、任务模块;2、保障模块;3、车轮;4、轮毂电机;5、蓄电池;6、任务系统;7、行驶系统;8、发电机;9、控制系统;10、发动机;11、油箱;12、动能转换机构;13、牵引锁止结构;14、电能传递接口;15、牵引对接杆;16、牵引对接锥; 17、视觉传感器;18、电控锁止机构;19、定位标识;—表示机械连接,
···
表示电气连接。
具体实施方式
[0018]
下面结合附图和实施例对本实用新型做进一步的说明。
[0019]
本实用新型提供的一种分体式混合动力车辆平台结构,包括任务模块(第一小车)、保障模块(第二小车)、分离连接机构和混合动力系统,任务模块和保证模块均设有无线通讯设备。
[0020]
其中保障模块负责车辆平台的牵引、补给、控制,由车体、底盘、车轮、发动机、发电机、油箱、动能转换机构、驾驶系统、远程控制系统、显示屏组成,由任务执行人员驾驶。本实施例采用的远程控制系统为常用的无人车远程控制系统。
[0021]
保障模块基于传统燃油车辆设计,由发动机驱动,采用三轮式结构,两个驱动轮,一个支撑轮,从而保证自身平衡。
[0022]
保障模块中的发动机可通过动能转换机构连接至发电机,带动发电机工作,产生电能,发电机连接至电能传递接口,可对任务模块进行补给。
[0023]
任务模块携带任务装备,执行指定任务,由车体、底盘、车轮、电动机、蓄电池、任务装备、装备操控系统、行驶系统、环境感知系统等组成,其中环境感知系统包括三轴陀螺仪和gps定位系统,任务模块由任务执行人员远程控制。
[0024]
任务模块基于电动车辆设计,由电动机驱动,采用两轮式结构,两轮均为轮毂电机驱动。
[0025]
任务模块中的蓄电池连接至电能传递接口,可接受保障模块的电能补给。
[0026]
任务模块的任务装备固定在车体的底座上,为可拆式结构,可根据执行任务的不同选择搭载不同的装备。
[0027]
分离连接机构为机械式结构,包括四个牵引锁止结构,一个电能传递接口以及视觉传感器对接定位系统。
[0028]
牵引锁止结构分为对接杆、对接锥,对接杆固定于任务模块车头的左上、左下、右
上、右下位置,对接锥固定于保障模块车尾的左上、左下、右上、右下位置,当对接杆与对接锥对接到位后,对接锥内的电控锁止结构自动弹出将其紧固连接。
[0029]
电能传递接口分为插头、插座,插座布置于任务模块车头的中间位置,插头布置于保障模块车尾的中间位置,当插头与插座结合时,可以对任务模块的蓄电池进行充电。
[0030]
视觉传感器对接定位系统包括视觉传感器与定位标识,分别位于对接杆的头部与对接锥的基座中心,当任务模块到达制定位置与保障模块进行对接时,由任务执行人员在视觉传感器对接定位系统的辅助下控制任务模型移动进行精准对接。
[0031]
混合动力系统包括保障模块中的发动机、发电机、油箱,任务模块中的蓄电池、电动机,以及分离连接机构中的电能传递接口。
[0032]
在分离状态时,保障模块由发动机驱动,任务模块由电动机驱动,在联结状态时,保障模块的发动机带动发电机工作,产生电能通过电能传递接口,传递至任务模块的蓄电池,进行电能补给。
[0033]
根据上述的一种分体式混合动力车辆平台结构,其工作模式可分为运输模式、任务模式、补给模式。
[0034]
在运输模式下,保障模块与任务模块处于联结状态,任务模块不工作,保障模块由发动机驱动,牵引车辆平台到达指定地点。
[0035]
在任务模式下,保障模块与任务模块处于分离状态,保障模块停留在指定地点,任务模块由轮毂电机驱动,到达任务区域,由任务执行人员远程操控其行驶或执行指定任务。
[0036]
在补给模式下,任务执行人员远程操控任务模块返回至保障模块停留地点,控制任务模块与保障模块对接,开启电能传递接口,保障模块发动机工作进行发电,向任务模块蓄电池补充电能。
[0037]
下面对本实用新型中的对接过程作进一步说明:
[0038]
当任务模块需要补给或执行完任务返航时,由任务执行人员下达指令,任务模块自动行驶至保障模块附近指定地点,并根据gps定位系统调整位置保持与保障模块的距离≤1米,根据三轴陀螺仪信号调整任务模块与保障模块的相对角度姿态,使对接杆与对接锥调整至临近位置,为下一步精准对接做准备。
[0039]
当任务模块与保障模块准备到位后,视觉传感器对接定位系统开始工作,任务执行人员由对接杆上的视觉传感器寻找对接锥内的定位标识;此时,对接锥内的电控锁止机构收起,任务执行人员控制任务模块移动,使对接杆与对接锥精准对接,随后电控锁止机构弹出,将对接杆与对接锥固定锁死,从而将任务模块与保障模块连接为一体。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 蓄电池

 热门咨询
热门咨询




tips