
 商标分类
商标分类  商标转让
商标转让 
小型物料搬动自导航车的制作方法
 2021-02-07 15:02:14|
2021-02-07 15:02:14| 243|
243| 起点商标网
起点商标网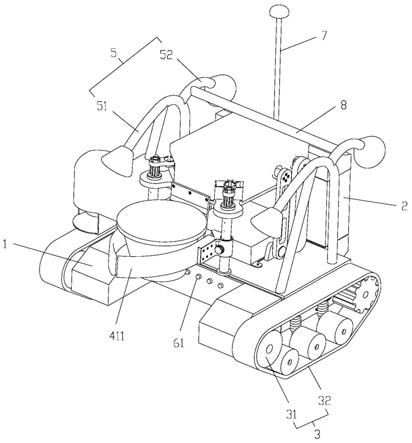
[0001]
本发明涉及工业设备技术领域,特别是涉及一种小型物料搬运自导航车。
背景技术:
[0002]
自导航车(automated guided vehicle,agv)在工业上常被用作物料搬运的工具。agv上装备有自动探测系统,可实现物料搬运过程中的全自动化和智能化,在港口、仓储、物流、搬运、危险地域等众多场所得到了广泛应用。目前自导航车多采用叉车结构,由于用于物料搬运的叉状件的体积较大,通常适用于户外或者中、大规模的厂房。对于运动空间受限的小厂房而言,小型物料大多数仍采用人工搬运或者人工手推车进行,这种搬运方式需要消耗较大的人力,如果物料为有毒有害物品,还会对人体造成一定的伤害。所以设计一种体积小、结构紧凑的小型物料搬运自导航车显得非常必要。
技术实现要素:
[0003]
鉴于以上所述现有技术的缺点,本发明的目的在于提供一种小型物料搬运自导航车,用于解决现有技术中小型物料搬运困难的问题。
[0004]
为实现上述目的及其他相关目的,本发明提供一种小型物料搬运自导航车,包括:底盘及固定在底盘上的控制装置、行走装置、物料夹持装置、视觉传感装置和扫描装置,所述行走装置受控于控制装置,带动底盘发生位移;所述物料夹持装置受控于控制装置,用于夹持目标物料;所述视觉传感装置用于对周围环境进行识别,并将信号传递给控制装置;所述扫描装置用于对目标物料和障碍物进行扫描,并将信号传递给控制装置。
[0005]
于本发明的一实施例中,所述物料夹持装置包括夹持机构和升降机构,所述夹持机构用于夹持目标物料,所述升降机构固定在底盘上,且与夹持机构连接,用于改变夹持机构的高度。
[0006]
于本发明的一实施例中,所述夹持机构包括夹钳、夹钳座、花键轴和拉紧部件,所述拉紧部件固定在升降机构上,并与所述花键轴连接,用于带动花键轴转动,所述夹钳固定在花键轴上。
[0007]
于本发明的一实施例中,所述夹持机构还包括旋钮,所述花键轴上设有若干固定孔,所述夹钳通过旋钮固定在花键轴上的任意固定孔上。
[0008]
于本发明的一实施例中,所述拉紧部件包括拉紧电机和传动组件,所述传动组件两端分别连接在花键轴和拉紧电机的转轴上,所述拉紧电机受控于控制装置。
[0009]
于本发明的一实施例中,所述升降机构包括驱动组件、第一连杆、第二连杆和升降盒,所述驱动组件固定在底盘上,所述第一连杆两端可转动地连接在驱动组件和升降盒上,所述第二连杆一端可转动地连接在升降盒上,另一端与驱动组件连接,并由驱动组件带动转动,所述第一连接与第二连杆平行设置,拉紧部件固定在升降盒上。
[0010]
于本发明的一实施例中,所述扫描装置包括目标扫描器和障碍物扫描器,且均与控制装置连接。
[0011]
于本发明的一实施例中,所述行走装置包括驱动轮和履带,所述驱动轮可转动地设置在底盘上,所述履带可转动地包覆在驱动轮上。
[0012]
于本发明的一实施例中,还包括急停拉手,所述急停拉手设置在底盘上,并与控制装置连接。
[0013]
于本发明的一实施例中,还包括提梁框架,所述提梁框架固定在底盘上。
[0014]
如上所述,本发明的小型物料搬运自导航车,具有以下有益效果:扫描装置能够对目标物料进行扫描并将信号传递给控制装置,使得控制装置驱动行走装置带动自导航车移动到目标位置;在行走的同时,扫描装置还能够对障碍物进行扫描,并将信号回传,使得自导航车在行进的时候能够顺利避开障碍物,避免发生碰撞影响工作;视觉传感装置能够对周围环境进行扫描,使得自导航车对周围环境有全局的识别;物料夹持装置能够对目标物料进行夹持,由于夹持的动作,对物料的搬运受物料的具体体积限制小,能够有效地搬运小型物料,从而减少人工成本。
附图说明
[0015]
图1显示为本发明实施例中公开的小型物料搬运自导航车的立体结构示意图。
[0016]
图2显示为图1的左视结构示意图。
[0017]
图3显示为图1的主视结构示意图。
[0018]
元件标号说明
[0019]
1-底盘;2-控制装置;3-行走装置;31-驱动轮;32-履带;4-物料夹持装置;41-夹持机构;411-夹钳;412-夹钳座;413-花键轴;414-拉紧部件;415-旋钮;42-升降机构;421-驱动组件;422-第一连杆;423-第二连杆;424-升降块;5-视觉传感装置;51-前视觉传感器;52-后视觉传感器;6-扫描装置;61-目标扫描器;62-障碍物扫描器;7-急停拉手;8-提梁框架。
具体实施方式
[0020]
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
[0021]
请参阅图1至图3。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
[0022]
请参阅图1-3,本发明提供一种小型物料搬运自导航车,包括底盘1及固定在底盘1上的控制装置2、行走装置3、物料夹持装置4、视觉传感装置5和扫描装置6。
[0023]
行走装置3受控于控制装置2,带动底盘1发生位移。物料夹持装置4受控于控制装置2,用于夹持目标物料。视觉传感装置5用于对周围环境进行识别,并将信号传递给控制装置2。扫描装置6用于对目标物料和障碍物进行扫描,并将信号传递给控制装置2。
[0024]
扫描装置6能够对目标物料进行扫描并将信号传递给控制装置2,使得控制装置2驱动行走装置3带动自导航车移动到目标位置;在行走的同时,扫描装置6还能够对障碍物进行扫描,并将信号回传,使得自导航车在行进的时候能够顺利避开障碍物,避免发生碰撞影响工作;视觉传感装置5能够对周围环境进行扫描,使得自导航车对周围环境有全局的识别;物料夹持装置4能够对目标物料进行夹持,由于夹持的动作,对物料的搬运受物料的具体体积限制小,能够有效地搬运小型物料,从而减少人工成本。
[0025]
在本实施例中,控制装置2为电控柜。
[0026]
参阅图2,物料夹持装置4包括夹持机构41和升降机构42。
[0027]
夹持机构41用于夹持目标物料,升降机构42固定在底盘1上,且与夹持机构41连接,用于改变夹持机构41的高度。
[0028]
夹持机构41包括夹钳411、夹钳座412、花键轴413和拉紧部件414。拉紧部件414固定在升降机构42上,并与花键轴413连接,用于带动花键轴413转动。夹钳411固定在花键轴413上。
[0029]
在本实施例中,夹钳411包括第一夹钳和第二夹钳,花键轴413包括第一花键轴和第二花键轴。花键轴413上设有若干固定孔。夹持机构41还包括旋钮415,夹钳411通过旋钮415固定在花键轴413上的任意固定孔上。第一夹钳和第二夹钳上均设有连接孔,通过连接孔、固定孔配合旋钮415使用,即可将第一夹钳和第二夹钳分别固定在第一花键轴和第二花键轴上。同时,通过调整连接孔与不同的固定孔连接,即可调节夹钳411在花键轴413上的固定高度。
[0030]
拉紧部件414包括拉紧电机和传动组件。传动组件两端分别连接在花键轴413和拉紧电机的转轴上,拉紧电机受控于控制装置2。
[0031]
当控制装置2控制拉紧电机工作时,拉紧电机转轴正转或反转,带动同步带转动,使得花键轴413转动,从而带动固定在花键轴413上的第一夹钳和第二夹钳产生打开或闭合的动作,实现对物料的夹持和放松。
[0032]
参阅图2-3,升降机构42包括驱动组件421、第一连杆422、第二连杆423和升降盒424。驱动组件421固定在底盘上,第一连杆422两端可转动地连接在驱动组件421和升降盒424上。第二连杆423一端可转动地连接在升降块424上,另一端与驱动组件421连接,并由驱动组件421带动转动。驱动组件421内设有升降电机,升降电机受控于控制装置,升降电机的转轴与第二连杆423固定连接。第一连接与第二连杆423平行设置,拉紧部件固定在升降盒424上。
[0033]
驱动组件421、第一连杆422、第二连杆423和升降盒424配合形成一组平行四边形,当第二连杆423在升降电机的带动下发生转动倾倒时,带动第一连杆422发生相同的转动倾倒,从而使得升降块424实现上下移动,从而带动拉紧部件上下移动。
[0034]
在本实施例中,视觉传感装置5包括前视觉传感器51和后视觉传感器52。
[0035]
参阅图2,扫描装置6包括目标扫描器61和障碍物扫描器62,且均与控制装置2连接。在本实施例中,目标扫描器61为激光雷达,可对于物料的具体所在位置进行扫描定位,并将位置信息传递给控制装置2,从而使得控制装置2驱动车体往物料的方向前进。障碍物扫描器62为激光测距仪,能够对车体前进方向上的障碍物进行扫描,并将信号传递给控制装置2,从而使得车体在前进时能够避开障碍物。
[0036]
参阅图1、3,行走装置3包括驱动轮31和履带32。驱动轮31可转动地设置在底盘1上,履带32可转动地包覆在驱动轮31上。驱动轮31受控于控制装置2,当驱动轮31转动时,直接带动履带32转动,从而带动车体前进。采用履带式的行走方式,能够使得车体在前进的时候更加地平稳。
[0037]
在本实施例中,小型物料搬运自导航车还包括急停拉手7。急停拉手7设置在底盘1上,并与控制装置2连接。当工作人员需要紧急停止车体运行时,可以通过急停拉手7来紧急制动。
[0038]
小型物料搬运自导航车还包括提梁框架8,提梁框架8固定在底盘1上。在需要将车体快速搬移时,使用人员可以直接通过提梁框架8将整体车体提起,从而放到需要的地方。
[0039]
综上所述,本发明能够对小型物料进行自动搬移,无需人工搬运,大大减小了人力资源,直接避免了有害物料对人体的伤害。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
[0040]
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 连杆机构

 热门咨询
热门咨询




tips