
 商标分类
商标分类  商标转让
商标转让 
一种金属表面爬壁机器人的制作方法
 2021-02-07 15:02:05|
2021-02-07 15:02:05| 312|
312| 起点商标网
起点商标网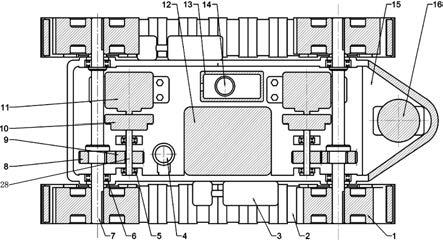
[0001]
本实用新型涉及机器人技术领域,尤其涉及一种金属表面爬壁机器人。
背景技术:
[0002]
自上世纪机器人问世以来,机器人在工业、日常生活以及其它多个领域得到了广泛的应用。在机器人领域中,一种特殊的移动机器人—爬壁机器人,能够在垂直陡壁上进行某些作业,可以完成人体不能或者很难完成的任务。由于在某些工作环境或条件例如垂直壁面等作业超出人类的极限,对人体消耗极大且非常危险,因此,爬壁机器人便应运而生,作为新型自动化机械装置,其性能优良,可替代人类在危险工况或无法进入的环境下工作,因此越来越受到人们的重视。
[0003]
金属爬壁机器人有着很重要的作用,例如:对金属壁面进行影像检查、探测厚度、焊缝检测及金属探伤等;对石油化工工业的油气罐的内外壁面进行检查或喷砂除锈、喷漆防腐;对各种建筑喷涂墙面、安装瓷砖、清洗壁面、壁面修复整容等;在消防救援上,可以传递救援物资,携带消防器械,实施救援工作;用于船业上喷涂船体的内外壁、对内外壁进行检查、船体内外壁清洁等。随着科学技术的不断发展,对爬壁机器人提出了越来越高的要求,包括多功能化、小型化、无电缆化、人工智能化等。因此,通过分析金属壁上工作的爬壁机器人的性能需求,对爬壁机器人进行结构设计,使得爬壁机器人能够在较为平滑的金属壁面上灵活、精准地爬行,并且携带各种工具进行作业,如进行金属厚度的探测、金属探伤、金属壁面喷漆和壁面清洁等工作,以实现爬壁机器人的功能多样化。这些功能要求机器人具有可靠的壁面吸附能力、移动的稳定性和精确性。同时,还需考虑到爬壁机器人意外脱落造成伤害的问题。
技术实现要素:
[0004]
本实用新型提出一种金属表面爬壁机器人,爬壁机器人的脚部或者轮部使用磁吸附式装置,携带各种工具,使用履带和转向机构,在金属表面进行移动、转向。使用锂电池进行供能,以电机驱动履带和转向轮进行移动。当机器人意外脱离墙面,立即弹出降落伞以减少机器损坏并防止机器掉落砸伤人或其他物品。
[0005]
为实现上述目的,本实用新型提供如下技术方案:
[0006]
本实用新型公开了一种金属表面爬壁机器人,包括机壳、履带、驱动机构、传动机构、吸附机构、转向机构以及保险机构,所述驱动机构包括设置于机壳内的直流电机、驱动轴、驱动齿轮,所述驱动轴的一端与所述直流电机的输出端连接,所述驱动齿轮套装于所述驱动轴的端部;所述传动机构包括传动轴、传动齿轮以及驱动轮,所述驱动轮固定于所述传动轴的两端,其与履带啮合带动其运动,所述传动齿轮套装于所述传动轴上与所述驱动齿轮相互啮合;吸附机构包括设置于所述履带上的永磁体;所述转向机构包括设置于机壳内的转向电机以及导向轮,所述导向轮设置于所述机壳的下方其导向轴与所述转向电机的输出端相连。
[0007]
所述驱动机构还包括直流电源以及谐波减速器,所述直流电源设置于所述机壳内,其与所述直流电机电连接驱动其转动;所述谐波减速器设置于所述驱动轴上;所述驱动轴通过若干组第一向心轴承固定于机壳内。
[0008]
所述永磁体大致呈锥形结构,其设置于所述履带外部的底面为平面;若干所述永磁体等间隔设置于所述履带上。
[0009]
所述永磁体为钕铁硼n35。
[0010]
所述驱动轴和传动轴分别通过若干组第一向心轴承和第二向心轴承固定于所述机壳内。
[0011]
所述机壳底部中间设有呈倒“t”型的磁轮连接轴,所述磁轮连接轴的两端套装有磁轮,所述磁轮的底部与所述永磁体的底面齐平,所述磁轮为由钕铁硼n35制成的磁轮。
[0012]
所述保险机构包括履带张紧机构,所述履带张紧机构由压缩弹簧、滚轮、铰链、第一支撑板以及第二支撑板组成,所述第一、第二支撑板固定于所述机壳的底部,所述铰链的一端与所述第一支撑板的底部连接,另一端与所述滚轮的侧壁连接;所述压缩弹簧的顶部与所述第二支撑板的底部连接,其底端与所述滚轮的顶部连接;所述滚轮的外壁与所述永磁体的内端顶紧。
[0013]
所述保险机构还包括降落伞保险机构,所述降落伞保险机构包括金属片、降落伞存放箱、第二压缩弹簧、保险电源、保险装置开关以及降落伞弹出装置,所述金属片包括下金属片和上金属片,所述下金属片与上金属片接触时,所述金属片、保险电源、降落伞弹出装置构成闭合电路;所述磁轮的磁轮连接轴的纵向连接杆的顶端穿过所述机壳底部后与所述下金属片的底部连接,所述第二压缩弹簧套装于所述连接杆上,其底端与所述机壳底部的内壁顶紧,顶端与所述下金属片的底端顶紧;所述降落伞存放箱呈顶部开口的方形结构,其内部设有用于放置降落伞的挡板,所述挡板的底部与所述降落伞存放箱的底部之间设有与两者连接的降落伞压缩弹簧,所述降落伞存放箱的侧壁下方设有用于呈“t”型结构的金属挡块插入的通孔,所述降落伞压缩弹簧压缩时,所述金属挡块的端部与所述挡板的顶部卡接;所述降落伞弹出装置为电磁铁,其端部与所述金属挡块之间设有间隙,当所述上、下金属片接触时,所述电磁铁吸引所述金属挡块,所述金属挡块与所述挡板接触限制。
[0014]
所述机壳为由机器人底壳和机器人上壳组合成的中空方形结构,所述机器人底壳和机器人上壳由铝合金制成。
[0015]
与现有技术相比,本实用新型的有益效果是:
[0016]
本实用新型提出一种金属表面爬壁机器人,其工作原理是机器人的脚部或者轮部使用磁吸附式装置,携带各种工具,使用履带和转向机构,在金属表面进行移动、转向。使用锂电池进行供能,以电机驱动履带和转向轮进行移动。该机器人结构简单、零部件少、成本低、操作简单方便。自带电池进行供能,无需连接电缆进行供电,小巧轻便。运动稳定、自如,具有一定越障能力;具有履带张紧机构和降落伞保险机构,保证机器人吸附的稳定性,使其在爬行运动时能够时刻贴紧在壁面上,安全地在壁面上运行而不脱离壁面坠落;即便是万一坠落,也能尽量减小机器人受到的伤害和对人、财物造成的损坏。
附图说明
[0017]
图1为本实用新型横向剖面图;
[0018]
图2为本实用新型的纵向剖面图;
[0019]
图3为本实用新型的右视图;
[0020]
图4为本实用新型中的履带张紧机构的结构示意图;
[0021]
图5为本实用新型中降落伞保险机构的结构示意图。
[0022]
图中,1.驱动轮,2.履带,3.履带张紧机构,4.金属片,41下金属片,42上金属片,5.第一向心轴承,6.第二向心轴承,7.传动轴,8.传动齿轮,9.驱动齿轮,10.谐波减速器,11.直流电机,12.直流电源,13.降落伞存放箱,131挡板,132降落伞压缩弹簧,133金属挡块,14.弹簧,15.机器人底壳,16.转向电机,17. 永磁体,18. 导向轮,19.机器人上壳,20.磁轮,21.保险装置开关,22.保险按钮,23.弹簧,24.滚轮,25铰链,26第一支撑板,27第二支撑板,28驱动轴,31纵向连接杆,32保险电源,33降落伞弹出装置。
具体实施方式
[0023]
下面将结合本实用新型实施例中的附图1-5,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0024]
本实用新型公开了一种金属表面爬壁机器人,包括机壳、履带2、驱动机构、传动机构、吸附机构、转向机构以及保险机构,所述驱动机构包括设置于机壳内的直流电机11、驱动轴28、驱动齿轮9,所述驱动轴28的一端与所述直流电机11的输出端连接,所述驱动齿轮9套装于所述驱动轴28的端部;所述传动机构包括传动轴7、传动齿轮8以及驱动轮1,所述驱动轮1固定于所述传动轴7的两端,其与履带2啮合带动其运动,所述传动齿轮8套装于所述传动轴7上与所述驱动齿轮9相互啮合;吸附机构包括设置于所述履带2上的永磁体17;所述转向机构包括设置于机壳内的转向电机16以及导向轮18,所述导向轮18设置于所述机壳的下方其导向轴与所述转向电机16的输出端相连;直流电机11带动驱动轴28转动,从而带动相互啮合的驱动齿轮9和传动齿轮8转动,从而带动传动轴7转动,最后带动驱动轮1转动以及与之啮合的履带2运动;所述转向机构由转向电机16带动导向轮18进行转向,通过控制转向电机16的正反转以及转动角度来控制导向轮18转动,保证爬壁机器人运动的准确性和灵活性;所述保险机构由履带张紧机构3和降落伞保险机构组成;爬壁机器人具有能够越过表面凸起的能力。
[0025]
所述驱动机构还包括直流电源12以及谐波减速器10,所述直流电源12设置于所述机壳内,其与所述直流电机11电连接驱动其转动;所述谐波减速器10设置于所述驱动轴28上;所述驱动轴28通过若干组第一向心轴承5固定于机壳内;直流电源12 为锂电池,驱动履带2在金属表面移动和转向,履带2材料为橡胶,采用自带电池的方式进行供能,无需连接电缆进行供电,直流电机11和谐波减速器10满足爬壁机器人小型化发展方向,而且可以增强爬壁机器人运动时的稳定性。
[0026]
所述永磁体17大致呈锥形结构,其设置于所述履带2外部的底面为平面;若干所述永磁体17等间隔设置于所述履带2上;所述永磁体17为钕铁硼n35,所述吸附机构的吸附方式为永磁式吸附,履带2上的永磁体17材料为钕铁硼n35,该吸附机构对爬壁机器人所工作的墙面粗糙度要求不高,且越障能力较强。
[0027]
所述驱动轴28和传动轴7分别通过若干组第一向心轴承5和第二向心轴承6固定于所述机壳内,将运动平稳传递给驱动轮1。
[0028]
所述机壳底部中间设有呈倒“t”型的磁轮连接轴,所述磁轮连接轴的两端套装有磁轮20,所述磁轮20的底部与所述永磁体17的底面齐平,所述磁轮20为由钕铁硼n35制成的磁轮。
[0029]
所述保险机构包括履带张紧机构3,所述履带张紧机构3由压缩弹簧23、滚轮24、铰链25、第一支撑板26以及第二支撑板27组成,所述第一、第二支撑板固定于所述机壳的底部,所述铰链25的一端与所述第一支撑板26的底部连接,另一端与所述滚轮24的侧壁连接;所述压缩弹簧23的顶部与所述第二支撑板27的底部连接,其底端与所述滚轮24的顶部连接;所述滚轮24的外壁与所述永磁体17的内端顶紧;避免爬壁机器人在爬行过程中,当壁面不平整、壁面存在突起、喷漆不平整、壁面生锈或者经过焊缝时,出现倾覆或者脱离壁面,压缩弹簧23提供的力可以用来张紧履带2,当爬壁机器人越过尺寸较小的突起时,履带张紧机构3可以在履带2上增加一个受力点,从而让履带2与墙体有更大的接触面积,避免爬壁机器人脱离壁面坠落,从而提高机器人工作过程中的稳定性。
[0030]
所述保险机构还包括降落伞保险机构,所述降落伞保险机构包括金属片4、降落伞存放箱13、第二压缩弹簧14、保险电源32、保险装置开关21以及降落伞弹出装置33,所述金属片4包括下金属片41和上金属片42,所述下金属片41与上金属片42接触时,所述金属片4、保险电源32、降落伞弹出装置33构成闭合电路;所述磁轮20的磁轮连接轴的纵向连接杆31的顶端穿过所述机壳底部后与所述下金属片41的底部连接,所述第二压缩弹簧14套装于所述连接杆31上,其底端与所述机壳底部的内壁顶紧,顶端与所述下金属片41的底端顶紧;所述降落伞存放箱13呈顶部开口的方形结构,其内部设有用于放置降落伞的挡板131,所述挡板131的底部与所述降落伞存放箱13的底部之间设有与两者连接的降落伞压缩弹簧132,所述降落伞存放箱13的侧壁下方设有用于呈“t”型结构的金属挡块133插入的通孔,所述降落伞压缩弹簧132压缩时,所述金属挡块133的端部与所述挡板131的顶部卡接;所述降落伞弹出装置33为电磁铁,其端部与所述金属挡块133之间设有间隙,当所述上、下金属片接触时,所述电磁铁吸引所述金属挡块133,所述金属挡块133与所述挡板131接触限制;当爬壁机器人紧贴在金属表面上时,磁轮20吸附在工作面上,第二压缩弹簧14被压缩,上、下金属片分开,此时打开保险按钮22(保险按钮22设置于机壳顶部用于开启或关闭保险装置开关21),使得保险装置开关21断开,电路断电;一旦爬壁机器人脱离壁面,磁轮20被第二压缩弹簧14弹回原位置,上、下金属片接触,电路接通,电磁铁通电吸引金属挡块133,使得金属挡块133与挡板131接触限制,此时降落伞压缩弹簧132由于复位作用,将挡板131向上弹射,放置于挡板131上的降落伞由降落伞存放箱13中被弹出,以减小机器人意外坠落对机器人自身和其他人员及物品造成的损伤。
[0031]
所述机壳为由机器人底壳15和机器人上壳19组合成的中空方形结构,所述机器人底壳15和机器人上壳19由铝合金制成,可以满足力学性能与腐蚀性能方面的需要。
[0032]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips