
 商标分类
商标分类  商标转让
商标转让 
一种差动式定位装置及爬壁机器人的制作方法
 2021-02-07 11:02:13|
2021-02-07 11:02:13| 342|
342| 起点商标网
起点商标网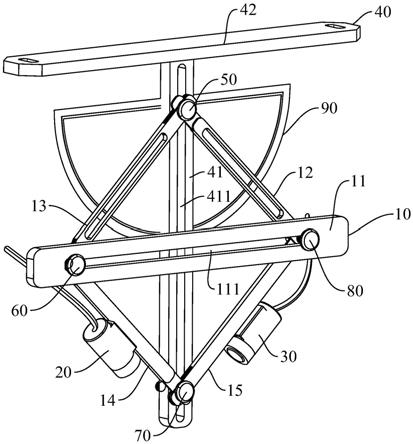
[0001]
本实用新型涉及机器人场景设计应用领域,特别是涉及一种差动式定位装置、以及安装有该差动式定位装置的爬壁机器人。
背景技术:
[0002]
随着社会的进步发展,越来越多的电厂采用各式各样的机器人进行检修特种作业,其中应用于电厂各类罐体、锅炉受热面以及钢架结构等环境的检测、清洁用途的爬壁机器人往往在高空的壁面进行作业任务,其中应用在锅炉水冷壁管检测的爬壁机器人具有广阔的研究应用前景。对该类爬壁机器人而言,无论采取何种驱动方式以及行走策略,必不可少地要保证爬壁机器人在沿水冷壁管的做直线运动时,需保持沿管轴心线直线行走的状态。因此,爬壁机器人上都安装有定位装置,用于检测爬壁机器人是否沿管轴心线直线行进。
[0003]
目前,爬壁机器人用的定位装置通常采用测距传感器正对管壁轴心线90
°
方向,在法上取连续测量中的最小值作为定位判据。但是,由于水冷壁管为圆弧壁面,测距值往往较为接近;另外,当爬壁机器人在直线行进过程中出现偏左或偏右的情况时,由于管壁对称性,测距值相同,所以对于轮组调整行走直线度的差速设计上需要截取连续一小段测距值,进行趋势分析,再结合爬壁机器人行走轨迹进行纠偏。由于需要趋势分析,收敛调整使两轮走直,使得该过程的定位灵敏度较低,不利于爬壁机器人在微短距离间调整行走状态,也就不利于爬壁机器人保持直线行走状态。
技术实现要素:
[0004]
鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种差动式定位装置,提高定位灵敏度,有利于爬壁机器人在短时间内调整行走状态。
[0005]
为实现上述目的,本实用新型提供一种差动式定位装置,用于安装在爬壁机器人上,所述差动式定位装置包括安装架、以及都安装在安装架上的左测距传感器和右测距传感器,所述左测距传感器用于测量其与水冷壁管壁之间的距离d1,所述右测距传感器用于测量其与水冷壁管壁之间的距离d2,所述左测距传感器和右测距传感器沿爬壁机器人的中心轴线左右对称设置。
[0006]
进一步地,所述左测距传感器与爬壁机器人的中心轴线之间的夹角为45
°
,所述右测距传感器与爬壁机器人的中心轴线之间的夹角为45
°
。
[0007]
进一步地,所述差动式定位装置还包括高程计,所述高程计具有沿垂直于水冷壁方向平直延伸的高程计量杆,所述安装架安装在高程计量杆上、且在高程计量杆上的安装位置可调。
[0008]
进一步地,所述高程计量杆上开设有沿垂直于水冷壁方向平直延伸的第一调节安装槽,所述安装架与高程计量杆通过第一螺钉相固定,所述第一螺钉穿设在第一调节安装槽中。
[0009]
进一步地,所述安装架包括第一杆件、第二杆件、第三杆件、第四杆件、以及第五杆件,所述第一杆件沿垂直于高程计量杆的方向平直延伸、且第一杆件中开设有沿垂直于高程计量杆的方向平直延伸的第二调节安装槽,所述第二杆件和第三杆件通过所述第一螺钉相连,所述第三杆件和第四杆件通过穿设在第二调节安装槽中的第二螺钉相连,所述第四杆件和第五杆件通过穿设在第一调节安装槽中的第一螺钉相连,所述第二杆件和第五杆件通过穿设在第二调节安装槽中的第四螺钉相连,所述左测距传感器固定安装在第四杆件上,所述右测距传感器固定安装在第五杆件上。
[0010]
进一步地,所述差动式定位装置还包括分度盘,所述分度盘通过所述第一螺钉与高程计固定相连。
[0011]
进一步地,所述左测距传感器和右测距传感器的类型都为电容测距传感器、激光测距传感器、或红外测距传感器。
[0012]
本申请还提供一种爬壁机器人,包括对称分布在中心轴线左右两侧的左侧驱动轮组和右侧驱动轮组,所述爬壁机器人上固定安装有如上所述的差动式定位装置。
[0013]
进一步地,所述差动式定位装置固定安装在爬壁机器人的底盘中央。
[0014]
进一步地,所述左侧驱动轮组和右侧驱动轮组之间为独立驱动。
[0015]
如上所述,本实用新型涉及的差动式定位装置及爬壁机器人,具有以下有益效果:
[0016]
本申请通过判断左测距传感器的测距值d1和右测距传感器的测距值d2之间的大小关系,即可精确地判断出爬壁机器人的行走状态:当d1=d2时,爬壁机器人为沿管轴心线直线行走的状态;当d1<d2时,爬壁机器人为相对于管轴心线偏左的状态;当d1>d2时,爬壁机器人为相对于管轴心线偏右的状态。因此,本申请能够快速判断爬壁机器人的行走状态,定位灵敏度较高,从而有利于爬壁机器人在短时间内调整行走状态,也就有利于爬壁机器人保持沿管轴心线直线行走状态。
附图说明
[0017]
图1为本申请中差动式定位装置的结构示意图。
[0018]
图2为图1的主视图。
[0019]
图3为图1的后视图。
[0020]
图4为爬壁机器人沿管轴心线直线行走时测距值d1和d2之间的关系示意图。
[0021]
图5为爬壁机器人相对于管轴心线偏左时测距值d1和d2之间的关系示意图。
[0022]
图6为爬壁机器人相对于管轴心线偏右时测距值d1和d2之间的关系示意图。
[0023]
元件标号说明
[0024]
10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
安装架
[0025]
11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一杆件
[0026]
111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二调节安装槽
[0027]
12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二杆件
[0028]
13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三杆件
[0029]
14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第四杆件
[0030]
15
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第五杆件
[0031]
20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
左测距传感器
[0032]
30
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
右测距传感器
[0033]
40
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
高程计
[0034]
41
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
高程计量杆
[0035]
411
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一调节安装槽
[0036]
42
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
固定架
[0037]
50
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一螺钉
[0038]
60
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二螺钉
[0039]
70
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三螺钉
[0040]
80
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第四螺钉
[0041]
90
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
分度盘
[0042]
110
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
螺母
[0043]
120
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
水冷壁
具体实施方式
[0044]
以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效。
[0045]
须知,本说明书附图所绘的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
[0046]
本申请提供一种差动式定位装置,用于安装在爬壁机器人上,定位爬壁机器人的行走状态,即定位爬壁机器人是否沿水冷壁的管轴心线直线行走、以及当偏移管轴心线时是偏左还是偏右。如图1至图3所示,本申请涉及的差动式定位装置包括安装架10、以及都安装在安装架10上的左测距传感器20和右测距传感器30,左测距传感器20和右测距传感器30沿爬壁机器人的中心轴线左右对称设置,爬壁机器人的中心轴线也即为爬壁机器人的定位中心线、平行于水冷壁120的管轴心线;如图4所示,左测距传感器20用于测量其与水冷壁120管壁之间的距离d1、即左测距传感器20与水冷壁120管壁最近位置点之间的距离,右测距传感器30用于测量其与水冷壁120管壁之间的距离d2、即右测距传感器30与水冷壁120管壁最近位置点之间的距离。
[0047]
本申请通过判断左测距传感器20的测距值d1和右测距传感器30的测距值d2之间的大小关系,即可精确地判断出爬壁机器人的行走状态:当d1=d2时,如图4所示,此时,爬壁机器人为沿管轴心线直线行走的状态,爬壁机器人的中心轴线与管轴心线在左右方向上重合;当d1<d2时,如图5所示,此时,爬壁机器人为相对于管轴心线偏左的状态,爬壁机器人的中心轴线在管轴心线的左侧;当d1>d2时,如图6所示,此时,爬壁机器人为相对于管轴心线偏右的状态,爬壁机器人的中心轴线在管轴心线的右侧。因此,本申请通过左测距传感器20的测距值d1和右测距传感器30的测距值d2够快速判断爬壁机器人的行走状态,当爬壁
机器人偏移管轴心线时,通过测距值d1和d2之间的大小关系可以直接判断出爬壁机器人是偏左还是偏右,不需要如现有技术进行趋势分析。故本申请定位灵敏度较高,从而有利于爬壁机器人在短时间内调整行走状态,也就有利于爬壁机器人保持沿管轴心线直线行走状态。
[0048]
进一步地,本申请中差动式定位装置作为差分定位的计算公式为:当d=0时,即为d1=d2,即可判断爬壁机器人为沿管轴心线直线行走的状态,不需要校正爬壁机器人的行进路线。当d<0时,即为d1<d2,即可判断爬壁机器人为相对于管轴心线偏左,则需要校正爬壁机器人的行进路线,对爬壁机器人的行进路线向右纠偏、直至d=0。当d>0时,即为d1>d2,即可判断爬壁机器人为相对于管轴心线偏右,则需要校正爬壁机器人的行进路线,对爬壁机器人的行进路线向左纠偏、直至d=0。
[0049]
优选地,如图2所示,左测距传感器20与爬壁机器人的中心轴线之间的夹角为45
°
,右测距传感器30与爬壁机器人的中心轴线之间的夹角为45
°
,故左测距传感器20的测距线与右测距传感器30的测距线之间为垂直相交的关系,如图4所示。采用该结构角度后,当爬壁机器人出现相对于管轴心线偏左或偏右时,如图5或图6所示,当左测距传感器20或右测距传感器30两者中的一个取得最小测距值时,另一个则与水冷壁120管壁为相切状态、可取得最大测距值,从而使得|d1-d2|最大,由此提高定位灵敏度和分辨率,从而提高差分定位的精确性。另外,左测距传感器20和右测距传感器30的类型相同,可以都为电容测距传感器、激光测距传感器、或红外测距传感器。
[0050]
进一步地,如图1至图3所示,差动式定位装置还包括高程计40,高程计40具有沿垂直于水冷壁120方向平直延伸的高程计量杆41、以及固定连接在高程计量杆41端部且沿垂直于高程计量杆41方向平直延伸的固定架42,固定架42用于固定在爬壁机器人的底盘中央,进而将差动式定位装置整体固定安装在爬壁机器人的底盘中央,安装架10安装在高程计量杆41上、且在高程计量杆41上的安装位置可调。在爬壁机器人的中心轴线与管轴心线在左右方向上重合的状态下,即当左测距传感器20的测距值d1等于右测距传感器30的测距值d2时,通过调节安装架10在高程计量杆41上的安装位置,可以调整左测距传感器20和右测距传感器30相对于水冷壁120管壁的位置,也即调节爬壁机器人在沿管轴心线直线行走状态下测距值d1和d2的大小,使d1+d2的值最小,此时可认为左测距传感器20和右测距传感器30的测距线交点正中位于水冷壁120的管轴心线的最近管壁处。因此,当后续差分定位计算时,当爬壁机器人的行走路线偏左或偏右时,即使测距值d1和d2的变化较小,但由于d值计算时的分母d1+d2值较小,故d值计算时的分子d1-d2的数值变化对d值变化产生明显影响,进一步提高灵敏度和分辨率,能够准确纠偏爬壁机器人的行走路线。
[0051]
优选地,如图1至图3所示,高程计量杆41上开设有沿垂直于水冷壁120方向平直延伸的第一调节安装槽42,安装架10与高程计量杆41通过第一螺钉50相固定,第一螺钉50穿设在第一调节安装槽42中,第一螺钉50上螺纹连接有螺母110。旋松螺母110后,可调整安装架10在高程计量杆41上的安装位置,也即调整测距值d1和d2的大小,调整结束后拧紧螺母110,将安装架10和高程计量杆41相固定,从而固定左测距传感器20和右测距传感器30相对于水冷壁120的管壁位置。
[0052]
进一步地,本申请中的安装架10为四边连杆机构可调,能够调整左测距传感器20
与爬壁机器人的中心轴线之间的夹角、以及右测距传感器30与爬壁机器人的中心轴线之间的夹角。具体说,如图1至图3所示,安装架10包括第一杆件11、第二杆件12、第三杆件13、第四杆件14、以及第五杆件15,第一杆件11沿垂直于高程计量杆41的方向平直延伸、且第一杆件11中开设有沿垂直于高程计量杆41的方向平直延伸的第二调节安装槽111,第二杆件12和第三杆件13通过第一螺钉50相连,第三杆件13和第四杆件14通过穿设在第二调节安装槽111中的第二螺钉60相连,第四杆件14和第五杆件15通过穿设在第一调节安装槽42中的第一螺钉50相连,第二杆件12和第五杆件15通过穿设在第二调节安装槽111中的第四螺钉80相连,左测距传感器20固定安装在第四杆件14上,右测距传感器30固定安装在第五杆件15上。第二螺钉60、第三螺钉70和第四螺钉80上都螺纹连接有螺母110,调节时旋松螺母110,调节结束后拧紧螺母110。优选地,第二杆件12和第三杆件13、第三杆件13和第四杆件14、第四杆件14和第五杆件15、以及第二杆件12和第五杆件15两两相连的两根杆件中,其中一根杆件的端部具有插槽,另一根杆件的端部可转动地置于插槽中。
[0053]
进一步地,如图1至图3所示,差动式定位装置还包括分度盘90,分度盘90通过第一螺钉50与高程计40固定相连,通过分度盘90可方便且直观地将第四杆件14调整为45
°
、以及将第五杆件15调整为135
°
,由此将左测距传感器20与爬壁机器人的中心轴线之间的夹角调整为45
°
、以及将右测距传感器30与爬壁机器人的中心轴线之间的夹角调整为45
°
。
[0054]
本申请还提供一种爬壁机器人,包括对称分布在中心轴线左右两侧的左侧驱动轮组和右侧驱动轮组,爬壁机器人上固定安装有如上的差动式定位装置;左侧驱动轮组和右侧驱动轮组之间为独立驱动,实现爬壁机器人的差速控制。当d<0时,可判定左测距传感器20的测距值d1小于右测距传感器30的测距值d2,由此可知爬壁机器人的中心轴线在偏离水冷壁120的管轴心线的左侧,则控制爬壁机器人向右侧做差速运动、直至d=0,完成爬壁机器人直线行走的操作。当d>0时,可判定左测距传感器20的测距值d1大于右测距传感器30的测距值d2,由此可知爬壁机器人的中心轴线在偏离水冷壁120的管轴心线的右侧,则控制爬壁机器人向左侧做差速运动、直至d=0,完成爬壁机器人直线行走的操作。
[0055]
综上所述,本实用新型有效克服了现有技术中的种种缺点而具高度产业利用价值。
[0056]
上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips