
 商标分类
商标分类  商标转让
商标转让 
履带爬楼机的制作方法
 2021-02-07 11:02:43|
2021-02-07 11:02:43| 301|
301| 起点商标网
起点商标网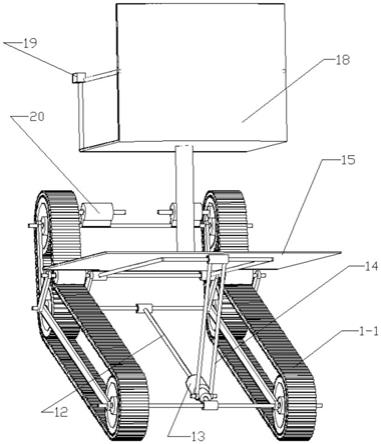
[0001]
本发明属于运输工具领域,具体涉及一种履带爬楼机。
背景技术:
[0002]
在生产生活中常常要搬运重物上下楼梯,更有行动不便的残疾人乘坐轮椅需要上下楼梯。轮椅不适合在坡道上行驶,遇到楼梯台阶、沟槽、坎就无法跨越,上下楼梯成了这些行动不便人群的最大障碍。
[0003]
坦克的履带,在越野行动中跋山涉水如履平地,如何将坦克的履带与轮椅结合,设计出能上下楼梯的轮椅是一个不错的方案。现有技术中也有类似的轮椅设计,一般是在轮椅下设计一个长条型履带,爬楼时放下履带实现爬楼行走。但在由平地到阶梯的结合部,常常因为履带低于第一级阶梯,而不能上行;且轮椅随履带倾斜,一旦重心超出履带,就会有倾覆危险。
技术实现要素:
[0004]
本发明旨在提供一种履带爬楼机,能轻松省力地搬运货物上下楼梯,或携带轮椅上下楼梯或平地履行。
[0005]
本发明解决其技术问题所采用的技术方案是:设计的履带爬楼机,主要包括行走履带系统和平台水平调节系统,行走履带系统由两条履带组成,前端向上翘起,在履带设计得比较小巧时也能跨上较高的台阶;平台水平调节系统中平台支架相对于履带的夹角随履带倾斜而调节,用于消除履带因地形而形成的夹角。使得载物或载人平台始终保持水平,平稳、舒适。
[0006]
履带前端向上翘起的角度可以调节,适应不同的坡度;每条履带至少有三个履带轮,驱动轮位于翘起的顶端,转折部有转折轮,末端有定位轮,安装在支架上,支架由两段刚性支架在转折部轴连接而成,固定履带形状,提供电池、控制器等附属部件安装空间。
[0007]
驱动轮用电机驱动,两条履带支架间刚性连接,并布置电池。两条履带驱动轮驱动电机独立,通过控制器控制不同转速实现转弯。
[0008]
进一步的,转折部还设有转折压轮,与转折轮配合,保证履带与履带轮的结合,避免在调节履带前端翘起角度时,履带出现松弛。
[0009]
转折压轮轮轴上轴安装平台支架,转折轮轴和定位轮轴间安装角度调节螺杆,螺杆上安装螺套电机,螺套电机与平台支架另一边曲柄轴连接。螺套电机运转,螺套沿螺杆运动,推动曲柄,曲柄撑起或放下平台支架,调节平台支架相对于履带的夹角,消除履带因地形而形成的夹角,使平台保持水平。
[0010]
进一步的,平台支架上安装平台,并配置带有方向、速度、平台角度控制器的扶手杆。平台角度控制器最好由水平仪传感器实时监测倾斜角,再通过处理器处理信号,发出执行命令,由执行器即螺套电机执行,实现自动控制。
[0011]
或平台支架上安装平台,并配置带有方向、速度、平台角度控制器的座椅,即为全
地形轮椅。
附图说明
[0012]
图1是本发明行走履带系统和水平调节系统结构示意图。
[0013]
图2是本发明实施例1平地运行示意图。
[0014]
图3是本发明实施例1爬楼运行示意图。
[0015]
图4是本发明实施例2平地运行示意图。
[0016]
图5是本发明实施例2爬楼运行示意图。
[0017]
如附图1、图2、图3、图4、图5本发明所述的履带爬楼机,主要由履带1-1、驱动轮6-1、驱动轮6-2、轮毂电机9-1、驱动电机20、水平履带轮支架10-1、上翘履带轮支架10-2、转折压轮11、平台支架3-4、螺杆12、螺套电机13、曲柄14、平台15、扶手杆16、方向轮17、座椅18、控制器19等部分组成。
[0018]
为说明的简洁明晰,图中略去不作为权利要求的通用部件。
具体实施方式
[0019]
下面结合附图和实施例对本发明进一步说明。
[0020]
实施例1
[0021]
如图1~图3,履带爬楼机,主要包括行走履带系统和平台水平调节系统,行走履带系统由两条履带1-1组成,平台水平调节系统中平台支架3-4相对于履带1-1的夹角随履带倾斜而调节。履带1-1前端向上翘起,且角度可以调节,适应不同的坡度;每条履带1-1有三个履带轮,驱动轮6-1(6-2)位于翘起的顶端,转折部有转折轮,末端有定位轮,安装在支架10-1(10-2)上,支架由两段刚性支架在转折部轴连接而成,固定履带1-1形状,驱动轮驱动履带行走。两条履带1-1支架间刚性连接,并布置电池。两条履带驱动轮驱动电机为相互独立的轮毂电机9-1,通过控制器控制不同转速实现转弯。
[0022]
履带1-1转折部还设有转折压轮11,与转折轮配合,保证履带与履带轮的结合,避免在调节履带前端翘起角度时,履带1-1出现松弛。转折压轮11轮轴上轴安装平台支架3-4,转折轮轴和定位轮轴间安装角度调节螺12杆,螺杆上安装螺套电机13,螺套电机与平台支架3-4另一边通过曲柄14轴连接。螺套电机13运转,螺套沿螺杆12运动,推动曲柄14,曲柄14撑起或放下平台支架3-4,调节平台支架3-4相对于履带1-1的夹角,消除履带因地形而形成的夹角,使平台15保持水平。
[0023]
平台上配置带有方向、速度、平台角度控制器的扶手杆16,通过方向轮17控制转向。平台角度控制器由水平仪传感器实时监测倾斜角,再通过处理器处理信号,发出执行命令,由执行器即螺套电机执行,实现自动控制。
[0024]
实施例2
[0025]
如图1、图4、图5,两条履带驱动轮6-1(6-2)驱动电机为相互独立的驱动电机20,通过控制器控制不同转速实现转弯。平台支架11上安装平台15,并配置带有方向、速度、平台角度控制器19的座椅18,其余同实施例1。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 电机

 热门咨询
热门咨询




tips