
 商标分类
商标分类  商标转让
商标转让 
一种大型商用车电动助力转向系统及其控制方法与流程
 2021-02-07 10:02:48|
2021-02-07 10:02:48| 344|
344| 起点商标网
起点商标网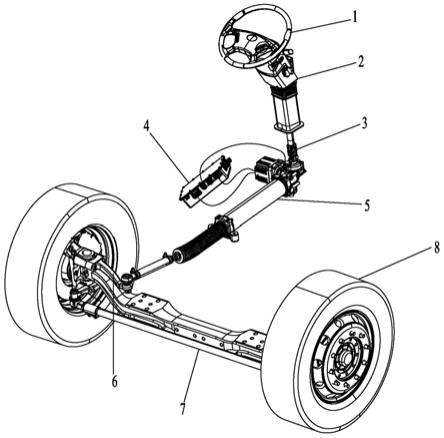
[0001]
本发明属于车辆转向系统技术领域,具体地说,本发明涉及一种大型商用车电动助力转向系统及其控制方法。
背景技术:
[0002]
新能源客车电动助力转向系统是纯电动、氢能源等新能源城市公交和公路客车转向系统的发展方向,是可实现车辆完全自动驾驶和高级驾驶辅助功能的转向执行部分,如车辆列队行驶、车道保持功能、变线辅助功能等等。新能源客车电动助力转向系统可应用于转向单轴载荷不大于7500kgf的新能源城市公交和公路客车。
[0003]
现有的现有新能源客车转向系统基本是液压助力转向系统或者电动液压助力转向系统,这两种转向系统油路布置与安装困难,后期维护成本高,因为需要使用液压油会造成一定的环境污染。另外这两种液压转向系统无法完全满足辅助驾驶或自动驾驶的转向功能需求。
技术实现要素:
[0004]
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提供一种大型商用车电动助力转向系统,目的是实现车辆完全自动驾驶和高级驾驶辅助功能。
[0005]
为了实现上述目的,本发明采取的技术方案为:大型商用车电动助力转向系统,包括转向传动轴、转向节臂和伸缩式电动转向助力装置,伸缩式电动转向助力装置包括与所述转向传动轴连接的输入轴、与输入轴连接的转向大齿轮、与转向大齿轮啮合的转向小齿轮、助力电机、与助力电机连接的助力小齿轮、与助力小齿轮啮合且与转向小齿轮同轴连接的助力大齿轮、与助力大齿轮连接的滚珠丝杠机构和与滚珠丝杠机构连接且与所述转向节臂连接的转向外拉杆。
[0006]
所述伸缩式电动转向助力装置还包括壳体组件,所述助力电机设置于壳体组件上,所述滚珠丝杠机构、转向大齿轮、转向小齿轮、助力小齿轮和助力大齿轮位于壳体组件的内部。
[0007]
所述滚珠丝杠机构包括与所述转向大齿轮连接的丝杠、与丝杠相配合的螺母、与螺母连接的伸缩杆和对螺母进行导向的导向杆,伸缩杆通过关节轴承与所述转向外拉杆连接。
[0008]
所述导向杆设置两个,所述螺母上设置有两个无油轴套,各个导向杆分别穿过一个无油轴套。
[0009]
本发明还提供了一种大型商用车电动助力转向系统的控制方法,在正常驾驶模式下,包括步骤:
[0010]
s11、车辆点火后,转向电子控制单元通电并准备工作,同时获取车辆行驶信号;
[0011]
s12、当驾驶员转动方向盘时,通过转向管柱与转向传动轴将转向力矩传输到伸缩式电动助力转向装置,扭矩角度传感器将作用在方向盘上的转动力矩大小和转动方向以及
方向盘转动角度信号收集后发送给转向电子控制单元;
[0012]
s13、转向电子控制单元将车辆速度信号、方向盘上的转动力矩大小和转动方向信号以及方向盘转动角度信号处理后,输出电流与转动方向信号至助力电机;
[0013]
s14、输入轴转动,助力电机同时进行运转,伸缩杆做直线运动,伸缩杆通过转向节臂和转向横拉杆带动车轮进行转向。
[0014]
本发明又提供了一种大型商用车电动助力转向系统的控制方法,在智能驾驶模式下,包括步骤:
[0015]
s21、车辆点火后,转向电子控制单元通电并准备工作,同时获取车辆行驶信号;
[0016]
s22、整车控制器发送转向控制信号至转向电子控制单元;
[0017]
s23、转向电子控制单元将转向控制信号处理后,输出电流与转动方向信号至助力电机;
[0018]
s24、助力电机进行运转,伸缩杆做直线运动,伸缩杆通过转向节臂和转向横拉杆带动车轮进行转向。
[0019]
本发明的大型商用车电动助力转向系统,零件数量少,成本低,集成度高,方便布置,无复杂的油路及油路附件需要组装;无液压油路,不存在漏油问题,不会造成环境污染;可满足辅助驾驶和自动驾驶的转向功能需求。
附图说明
[0020]
本说明书包括以下附图,所示内容分别是:
[0021]
图1是本发明大型商用车电动助力转向系统的结构示意图;
[0022]
图2是本发明大型商用车电动助力转向系统在正常驾驶模式工作原理图;
[0023]
图3是本发明大型商用车电动助力转向系统在智能驾驶模式工作原理图;
[0024]
图4是本发明大型商用车电动助力转向系统在右转方向盘时的动作原理图;
[0025]
图5是本发明大型商用车电动助力转向系统在左转方向盘时的动作原理图;
[0026]
图6是伸缩式电动转向助力装置的结构示意图;
[0027]
图7是伸缩式电动转向助力装置的内部结构示意图;
[0028]
图8是螺母与导向杆的配合示意图;
[0029]
图9是减速机构的结构示意图;
[0030]
图10是关节轴承的剖视图;
[0031]
图中标记为:1、方向盘;2、转向管柱;3、转向传动轴;4、转向电子控制单元;5、伸缩式电动转向助力装置;501、助力电机;502、伸缩杆;503、转向外拉杆;504、转向大齿轮;505、转向小齿轮;506、助力小齿轮;507、助力大齿轮;508、第一壳体;509、第二壳体;510、壳体连接管;511、丝杠;512、螺母;513、无油轴套;514、导向杆;515、连接杆;516、球形外圈;517、球形内圈;518、垫圈;519、防尘罩;520、螺栓;521、锁紧螺母;522、输入轴;6、转向节臂;7、转向横拉杆;8、车轮。
具体实施方式
[0032]
下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,目的是帮助本领域的技术人员对本发明的构思、技术方案有更完整、准确和深入的理
解,并有助于其实施。
[0033]
需要说明的是,在下述的实施方式中,所述的“第一”和“第二”并不代表结构和/或功能上的绝对区分关系,也不代表先后的执行顺序,而仅仅是为了描述的方便。
[0034]
如图1至图10所示,本发明提供了一种大型商用车电动助力转向系统,包括方向盘1、转向管柱2、转向传动轴3、转向节臂6和伸缩式电动转向助力装置5,伸缩式电动转向助力装置5包括扭矩角度传感器、与转向传动轴3连接的输入轴522、与输入轴522连接的转向大齿轮504、与转向大齿轮504啮合的转向小齿轮505、助力电机501、与助力电机501连接的助力小齿轮506、与助力小齿轮506啮合且与转向小齿轮505同轴连接的助力大齿轮507、与助力大齿轮507连接的滚珠丝杠机构和与滚珠丝杠机构连接且与转向节臂6连接的转向外拉杆503,转向外拉杆503与其中一个车轮的转向节臂6转动连接,两个车轮的转向节与转向横拉杆7转动连接,转向横拉杆7使两个车轮同步转向。
[0035]
具体地说,如图1至图7和图9所示,转向管柱2的上端与方向盘1固定连接,转向管柱2的下端与转向传动轴3的上端固定连接,转向传动轴3的下端与输入轴522固定连接,转向大齿轮504与输入轴522为同轴固定连接,扭矩角度传感器设置于输入轴522上。转向小齿轮505与转向大齿轮504相啮合,构成增速机构,转向小齿轮505的直径小于转向大齿轮504的直径。转向小齿轮505与助力大齿轮507为同轴固定连接,助力小齿轮506与助力大齿轮507相啮合,构成减速机构,助力小齿轮506的直径小于助力大齿轮507的直径,助力小齿轮506与助力电机501的电机轴固定连接,助力小齿轮506的轴线与输入轴522的轴线在空间上相垂直。伸缩式电动转向助力装置5还包括壳体组件,助力电机501设置于壳体组件上,滚珠丝杠机构、转向大齿轮504、转向小齿轮505、助力小齿轮506和助力大齿轮507位于壳体组件的内部。壳体组件包括第一壳体508、第二壳体509和壳体连接管510,壳体连接管510具有一定的长度且内部中空的壳体结构,第一壳体508和第二壳体509分别与壳体连接管510的长度方向上的相对两端固定连接。助力电机501与第一壳体508固定连接,输入轴522为可旋转的设置于第一壳体508上,转向大齿轮504、转向小齿轮505、助力小齿轮506和助力大齿轮507位于第一壳体508的内部,伸缩杆502穿过第二壳体509,伸缩杆502的一端位于壳体连接管510的内部,伸缩杆502的另一端位于第二壳体509的外部。采用两对齿轮副分别实现转向与助力功能,转向小齿轮505、转向大齿轮504、助力小齿轮506和助力大齿轮507均为双曲面齿轮,结构紧凑、齿轮刚度大、传动平稳,相对齿轮尺寸小、重量轻。
[0036]
如图1至图8所示,滚珠丝杠机构包括与转向大齿轮504连接的丝杠511、与丝杠511相配合的螺母512、与螺母512连接的伸缩杆502和对螺母512进行导向的导向杆514,伸缩杆502通过关节轴承与转向外拉杆503连接。壳体连接管510为圆柱体,丝杠511与壳体连接管510为同轴设置,丝杠511为可旋转的设置于壳体连接管510的内部,丝杠511与转向大齿轮504为同轴固定连接,丝杠511与螺母512构成螺旋传动,螺母512位于壳体连接管510的内部,螺母512与伸缩杆502的一端固定连接,伸缩杆502为圆柱体,伸缩杆502与丝杠511和螺母512为同轴设置。丝杠511转动后,螺母512带动伸缩杆502同步沿轴向进行移动,伸缩杆502通过转向外拉杆503带动转向节臂6进行转动,实现车轮的偏转,进而实现车辆的转向。
[0037]
转向功能:如图4所示,当驾驶员操纵方向盘1向右进行车辆转向时,带动输入轴522顺时针旋转,与输入轴522连成一体的转向大齿轮504顺时针转动,通过齿轮啮合带动转向小齿轮505逆时针转动,因转向小齿轮505与丝杠511连成一体,从而带动丝杠511逆时针
转动并且使螺母512与伸缩杆502向内缩短,进而推动车轮向右转动;如图5所示,当驾驶员操纵方向盘1向左进行车辆转向时,带动输入轴522逆时针旋转,与输入轴522连成一体的转向大齿轮504逆时针转动,通过齿轮啮合带动转向小齿轮505顺时针转动,因转向小齿轮505与滚珠丝杠511连成一体,从而带动丝杠511顺时针转动并且使螺母512与伸缩杆502向外伸长,进而推动车轮向左转动。
[0038]
可以通过设定转向齿轮副的齿数比来调整方向盘1圈数,以适应不同车辆对方向盘1圈数的要求,齿数比越大、方向盘1圈数越小,反之齿数比越小、则方向盘1圈数越多。转向齿轮副为增速减扭,因而驾驶员操纵方向盘1的转舵力矩通过该齿轮副时,给转向小齿轮505的扭矩会按齿数比减小,因此该齿轮副受力小、寿命长、可靠耐用。
[0039]
助力功能:如图4所示,当驾驶员操纵方向盘1向右进行车辆转向时,带动输入轴522顺时针旋转,与输入轴522焊接在一起的扭矩角度传感器将获取的转向力和转向角度信号发送给转向电子控制单元4(ecu),转向电子控制单元4(ecu)对信号处理并运算后,助力电机501及助力小齿轮506顺时针转动,通过齿轮啮合带动助力大齿轮507逆时针转动,因助力大齿轮507也与丝杠511连成一体,从而带动丝杠511逆时针转动并且使螺母512与伸缩杆502向内缩短,进而推动车轮向右转动;如图5所示,当驾驶员操纵方向盘1向左进行车辆转向时,带动输入轴522逆时针旋转,与输入轴522焊接在一起的扭矩角度传感器将获取的转向力和转向角度信号发送给转向电子控制单元4(ecu),转向电子控制单元4(ecu)对信号处理并运算后,助力电机501及助力小齿轮506逆时针转动,通过齿轮啮合带动助力大齿轮507顺时针转动,因助力大齿轮507也与丝杠511连成一体,从而带动丝杠511顺时针转动并且使螺母512与伸缩杆502向外伸长,进而推动车轮向左转动。
[0040]
可以通过设定转向齿轮副的齿数比来改变输出扭矩的大小,以适应不同载荷车辆轮胎转向力矩的要求,齿数比越大、输出扭矩越大,反之齿数比越小、则输出扭矩越小。助力齿轮副为减速增扭,车辆轮胎转向驱动力矩基本由电机通过助力齿轮副提供,以减小驾驶员的操舵负担。
[0041]
如图8所示,导向杆514位于壳体连接管510的内部,导向杆514的轴线与丝杠511的轴线相平行,导向杆514设置两个,两个导向杆514之间的夹角为180度。螺母512在直线往复移动时,采用两根导向杆514防止螺母512的圆周方向转动。螺母512上设置有两个无油轴套513,各个导向杆514分别穿过一个无油轴套513。螺母512的法兰面上加工有两个圆形通孔,各个无油轴套513分别安装在螺母512上的一个圆孔通孔中,无油轴套513采用三层复合材料制成的无油轴套513,两个导向杆514分别穿过两个无油轴套513的中心孔。无油轴套513与导向杆514采用小间隙配合,导向杆514的两端固定,当螺杠受转动力矩时,由两根导向杆514抑制螺母512圆周方向的力矩。导向杆514的外圆面镀铬并淬硬后磨光,以保证导向杆514刚度大和表面光洁,以满足导向杆514在保持直线运动时基本没有弯曲变形,并且无油轴套513的摩擦系数低,从而确保螺母512运动顺畅。
[0042]
如图6、图7和图9所示,关节轴承通过由螺栓520和锁紧螺母521构成的紧固件与转向外拉杆503连接,关节轴承包括与伸缩杆502连接的连接杆515、与连接杆515连接的球形外圈516、设置于球形外圈516的中心孔中的球形内圈517、设置于球形内圈517相对两端的垫圈518和设置于球形外圈516与转向外拉杆503之间的防尘罩519,转向外拉杆503通过螺栓520与球形内圈517连接,螺栓520穿过垫圈518和球形内圈517。转向外拉杆具有503容纳
关节轴承的容置槽,该容置槽为u形槽,防尘罩519设置两个,球形外圈516位于两个防尘罩519之间且两个防尘罩519分别与容置槽的两个相对内壁面相接触。连接杆515的一端与伸缩杆502的端部固定连接,球形外圈516与连接杆515的另一端固定连接,球形内圈517的外球面与球形外圈516的内圆面相接触,球形外圈516的球心与球形内圈517的球心为同一点,球形外圈516与球形内圈517可相对转动。转向外拉杆503的端部具有让螺栓520穿过的通孔,垫圈518的中心处设置让螺栓520穿过的中心孔,垫圈518夹在球形内圈517与容置槽的内壁面之间,垫圈518与球形内圈517为同轴设置。推拉杆带动连接杆515和球形外圈516进行直线运动时,将推拉力通过球形内圈517传递给垫圈518,通过垫圈518将推拉力再传给螺栓520,再由螺栓520将推拉力传递给转向外拉杆503。转向外拉杆503在车辆转向过程中,不仅要进行直线往复运动,还要进行以围绕关节轴承的球形内圈517球心的偏摆运动,因此设置关节轴承进行连接。
[0043]
如图9所示,关节轴承的球形内圈517的两端各压装一个垫圈518,垫圈518上分别装配一个防尘罩519。转向外拉杆503的大端开一个u形槽,并加工一个圆形贯穿通孔,用一根螺栓520穿过该通孔并同时穿过关节轴承的球形内圈517,然后用一个螺母拧紧。关节轴承的垫圈518,主要用来承受运动方向的剪切力,同时因为垫圈518高度的增加,使转向外拉杆503的偏摆角度变大,偏摆行程也相应增大。垫圈518上安装有防尘罩519,防尘罩519为圆环形结构,防尘罩519与垫圈518为同轴设置,防尘罩519的轴向上的两端端面分别与球形外圈516的端面和容置槽的内壁面贴合,在转向外拉杆503做偏摆运动时,防尘罩519可以有效地在转向外拉杆503与关节轴承间形成密封,以起到防尘防水的作用。上述结构的关节轴承装配方便、简单可靠,而且制作成本低。
[0044]
上述结构的大型商用车电动助力转向系统,具有如下的优点:
[0045]
1、质量轻,在新能源客车上应用更有优势;
[0046]
2、整车布置方便,沿用原有车辆转向器布置方案即可;
[0047]
3、产品集成度高,安装方便,无复杂的油路及油路附件需要组装;
[0048]
4、转向轻便、噪音低,转向舒适性与主动安全性高;
[0049]
5、无液压油路,不存在漏油问题,不会造成环境污染;
[0050]
6、可以快速匹配不同车型,只通过调试转向电子控制单元4的软件设置即可实现最佳性能;
[0051]
7、整个寿命周期内免维护,且可自行并快速进行故障诊断;
[0052]
8、可满足辅助驾驶和自动驾驶的转向功能需求;
[0053]
9、零件数量少、成本低;
[0054]
10、能耗低,助力电机501只有在进行车辆转向动作时工作;
[0055]
11、伸缩式电动转向助力装置5为一体式结构,集成度高,直动伸缩结构机械效率高。
[0056]
本发明还提供了一种大型商用车电动助力转向系统的控制方法,在正常驾驶模式下,包括如下的步骤:
[0057]
s11、车辆点火后,转向电子控制单元4通电并准备工作,同时获取车辆行驶信号;
[0058]
s12、当驾驶员转动方向盘1时,通过转向管柱2与转向传动轴3将转向力矩传输到伸缩式电动助力转向装置,扭矩角度传感器将作用在方向盘1上的转动力矩大小和转动方
向以及方向盘1转动角度信号收集后发送给转向电子控制单元4;
[0059]
s13、转向电子控制单元4将车辆速度信号、方向盘1上的转动力矩大小和转动方向信号以及方向盘1转动角度信号处理后,输出电流与转动方向信号至助力电机501;
[0060]
s14、输入轴522转动,助力电机501同时进行运转,伸缩杆502做直线运动,伸缩杆502通过转向节臂6和转向横拉杆7带动车轮进行转向。
[0061]
如图2所示,在正常驾驶模式下,通过转向电子控制单元4(ecu)将各种信号收集、运算后驱动助力电机501,并由助力电机501带动伸缩机构传递推拉力来实现轮胎转向。
[0062]
在上述步骤s11中,获取的车辆行驶信号包括车辆ready和行驶速度信号。
[0063]
在上述步骤s14中,输入轴522带动伸缩式电动助力转向装置(pp-eps)上的伸缩杆502进行直线往复运动;助力电机501同时通过减速机构带动伸缩式电动助力转向装置(pp-eps)上的伸缩杆502进行直线往复运动,因此伸缩杆502得到来自方向盘1操舵力和电机助力两个力的叠加;伸缩杆502往复运动,通过转向节臂6、转向横拉杆7带动车轮进行左右转向;车轮的转向力,绝大部分由助力电机501提供,方向盘1操舵力很小且调整到驾驶员舒适的状态。
[0064]
本发明又提供了一种大型商用车电动助力转向系统的控制方法,在智能驾驶模式下,包括如下的步骤:
[0065]
s21、车辆点火后,转向电子控制单元4通电并准备工作,同时获取车辆行驶信号;
[0066]
s22、整车控制器(vcu)发送转向控制信号至转向电子控制单元4;
[0067]
s23、转向电子控制单元4将转向控制信号处理后,输出电流与转动方向信号至助力电机501;
[0068]
s24、助力电机501进行运转,伸缩杆502做直线运动,伸缩杆502通过转向节臂6和转向横拉杆7带动车轮进行转向。
[0069]
如图3所示,在智能驾驶模式下,由整车控制器(vcu)直接向转向电子控制单元4(ecu)发送转向角度、角速度、方向等信号,再由转向电子控制单元4(ecu)对信号进行处理、运算后驱动助力电机501,并由助力电机501带动伸缩机构传递推拉力来实现轮胎转向。
[0070]
在上述步骤s21中,获取的车辆行驶信号包括车辆ready和行驶速度信号。
[0071]
在上述步骤s22中,转向控制信号包括转向角度、角速度和转向方向信号。
[0072]
在上述步骤s23中,助力电机501通过减速机构带动伸缩式电动助力转向装置(pp-eps)上的伸缩杆502进行直线往复运动;伸缩杆502往复运动,通过转向节臂6、转向横拉杆7带动车轮进行左右转向;车轮的转向力,绝大部分由助力电机501提供,方向盘1操舵力很小且调整到驾驶员舒适的状态。
[0073]
以上结合附图对本发明进行了示例性描述。显然,本发明具体实现并不受上述方式的限制。只要是采用了本发明的方法构思和技术方案进行的各种非实质性的改进;或未经改进,将本发明的上述构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips