
 商标分类
商标分类  商标转让
商标转让 
两轮电动车辅助爬坡控制方法及爬坡辅助系统与流程
 2021-02-07 10:02:45|
2021-02-07 10:02:45| 630|
630| 起点商标网
起点商标网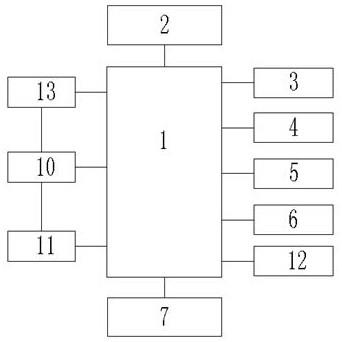
两轮电动车辅助爬坡控制方法及爬坡辅助系统
[0001]
技术领域
[0002]
本发明涉及一种辅助爬坡控制方法及爬坡辅助系统,特别是一种两轮电动车辅助爬坡控制方法及爬坡辅助系统。
背景技术:
[0003]
两轮电动车作为短途交通工具在现在生活中已经非常普遍,其一般通过轮毂电机驱动后轮转动,进而推动整体前进;一般的两轮电动车包括前轮、前轮悬架(前叉)、后轮、后轮悬架、车把、转把、轮毂电机、电瓶(电源)、车身、显示器和ecu控制器等结构组成;驾驶时通过转动转把,根据转把的开度并利用霍尔原理来控制轮毂电机的输出扭矩,进而控制两路电动车的行驶速度和行驶加速度。但是,当两轮电动车行驶至上坡时,其转把的转动所能够带来的速度和加速度的响应均不够及时,导致爬坡驾驶感不理想;甚至,当两轮电动车载重过重或者上坡的坡度较大时,还容易出现动力不足等问题,导致驾驶安全性不理想。因此,现有的两轮电动车在爬坡时存在着驾驶感不理想和驾驶安全性不理想的问题。
技术实现要素:
[0004]
本发明的目的在于,提供一种两轮电动车辅助爬坡控制方法及爬坡辅助系统。本发明用于两轮电动车中不仅能够提高爬坡时的驾驶感,还具有驾驶安全性好的优点。
[0005]
本发明的技术方案:两轮电动车辅助爬坡控制方法,包括以下步骤;s1、通过在两轮电动车前叉上安装第一倾斜角传感器和在电动车后轮悬架上安装第二倾斜角传感器来分别检测两轮电动车前后部的倾斜度;第一倾斜角传感器测得倾斜度θ1,第二倾斜角传感器测得倾斜度θ2;s2、根据两轮电动车转把开度计算获得理论扭矩t1;s3、通过在后轮悬架上安装压力传感器检测后轮承担压力f,然后计算后轮载重m
载
,m
载
=f/(g
×
cosθ2);其中f为压力传感器检测的压力值,g为标准重力加速度,θ2为第二倾斜角传感器测得倾斜度;s4、根据扭矩和转速的计算公式,计算出与理论扭矩t1对应的理论转速n1,计算公式为,t1=j
总
δω/δt=(m
载
r2+m
轮
r2/2)
×
2πδn1/δt;其中j
总
为后轮在载重情况下的总转动惯量,m
载
为后轮载重,m
轮
为后轮自重,r为后轮半径,ω为后轮转动角速度,t为时间,δω/δt为后轮转动角加速度;s5、通过在后轮处安装转速传感器检测后轮的实际转速n2;s6、通过ecu控制器对比实际转速和理论转速来判断是否启动爬坡辅助功能,设定一个转速差阈值a,当n
1-n2≥a时,启动爬坡辅助功能,当n
1-n2<a时,关闭爬坡辅助功能;s7、启动爬坡辅助功能后,ecu控制器计算需要提供的辅助扭矩t2,根据公式t2=t1n1/n
2-t1计算辅助扭矩t2,其中t1为理论扭矩,n1为理论转速,n2为实际转速;
s8、在两轮电动车上中置辅助电机,启动辅助电机,辅助电机通过同步带驱动后轮,给后轮提供辅助扭矩t2,从而实现准确地爬坡辅助。
[0006]
前述的两轮电动车辅助爬坡控制方法中,所述步骤s6为,通过ecu控制器对比实际转速和理论转速,再结合倾斜度θ1和倾斜度θ2的数值来是判断是否启动爬坡辅助功能,设定一个转速差阈值a,当n
1-n2≥a且θ1和θ2均大于零时,启动爬坡辅助功能,当n
1-n2<a或θ1等于零或θ2等于零时,关闭爬坡辅助功能。
[0007]
前述的两轮电动车辅助爬坡控制方法中,所述步骤s7为,启动爬坡辅助功能后,ecu控制器计算需要提供的辅助扭矩t2,根据公式t2=t1n1/n2+t
3-t1计算辅助扭矩t2,其中t1为理论扭矩,n1为理论转速,n2为实际转速,t3为电动车车把转向附加阻力扭矩;在电动车车把上安装转动角度传感器检测车把相对应车身的转动角度θ3,当θ3小于等于30
º
时,通过t3=f(θ3)计算转向附加阻力扭矩,f(θ3)为θ3的单调递增函数,当θ3大于30
º
时,t3=0;f(θ3)的公式模型通过多次试验获得。
[0008]
依据前述的两轮电动车辅助爬坡控制方法所构建的爬坡辅助系统,包括ecu控制器和显示仪表盘,ecu控制器上通过无线通讯连接有位于电动车前叉的第一倾斜角传感器和位于电动车后轮悬挂的第二倾斜角传感器;ecu控制器上通过无线通讯还连接有位于电动车后轮悬挂上的压力传感器和安装在后轮处的转速传感器;所述ecu控制器与显示仪表盘连接,所述电动车后轮内连接有轮毂电机,轮毂电机的一侧连接有带轮;带轮上通过同步带连接有辅助电机,辅助电机中置在电动车上;辅助电机上连接有辅助电源,辅助电机和辅助电源均与ecu控制器连接。
[0009]
前述的爬坡辅助系统中,所述ecu控制器上通过无线连接有转动角度传感器,转动角度传感器位于电动车车把上。
[0010]
前述的爬坡辅助系统中,所述第一倾斜角传感器用于检测电动车前轮位置处运行姿态的倾斜角度,第二倾斜角传感器用于检测电动车后轮位置处运行姿态的倾斜角度。
[0011]
前述的爬坡辅助系统中,所述压力传感器为环形压力传感器,环形压力传感器套接在后轮悬挂和轴承之间。
[0012]
前述的爬坡辅助系统中,所述轮毂电机和带轮之间通过电子离合器连接。
[0013]
与现有技术相比,本发明设计了一种两轮电动车辅助爬坡控制方法及爬坡辅助系统,通过安装第一倾斜角传感器和第二倾斜角传感器来检测两轮电动车前后部的倾斜度,一般可以安装在前轮悬架和后轮悬架上来进行检测,根据两个倾斜度数据来判断电动车是否处于倾斜的状态;结合压力传感器检测后轮压力来计算后轮载重,进而根据理论扭矩来计算理论转速,计算理论转速时引入了倾斜度和载重参数,能够使计算结果与倾斜度和载重相适应,并通过转速传感器来检测后轮实际转速,结合理论转速和实际转速的比较来判断两轮电动车是否位于爬坡状态和是否启动爬坡辅助,通过设置转速差阈值a来实现理论转速和实际转速的容许误差,避免爬坡辅助误启动,通过辅助转矩的计算能够使辅助电机准确提供辅助转矩,从而实现了自适应载重和倾斜度的辅助转矩输出,能够在不同载重和不同上坡坡度的情况下提高速度和加速度的调节响应,提高爬坡时的驾驶感和驾驶安全性。此外,本发明还设置了转动角度传感器,用于检测两轮电动车车把的转动角度,能够通过辅助电机额外提供辅助扭矩来抵消车头转弯或转动所导致的前轮阻力,进一步提高爬坡时的驾驶感和驾驶安全性;通过设置环形压力传感器能够准确方便的检测后轮悬架施加在
后轮上的压力,方便准确计算后轮载重和辅助扭矩;通过设置电子离合器能够在不需要爬坡辅助时断开带轮和轮毂电机之间的连接,能够避免在正常行驶(非爬坡)时带轮转动而增加能耗,方便使用。因此,本发明用于两轮电动车中不仅能够提高爬坡时的驾驶感,还具有驾驶安全性好和使用方便的优点。
附图说明
[0014]
图1是本发明的结构示意图;图2是辅助电机的连接结构示意图;图3是压力传感器处的连接结构示意图。
[0015]
附图中的标记为:1-ecu控制器,2-显示仪表盘,3-第一倾斜角传感器,4-第二倾斜角传感器,5-压力传感器,6-转速传感器,7-轮毂电机,8-带轮,9-同步带,10-辅助电机,11-辅助电源,12-转动角度传感器,13-电子离合器,14-后轮,15-后轮悬架,16-轴承。
具体实施方式
[0016]
下面结合实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
[0017]
实施例。两轮电动车辅助爬坡控制方法,如图1至3所示结构,包括以下步骤:s1、通过在两轮电动车前叉上安装第一倾斜角传感器3和在电动车后轮悬架上安装第二倾斜角传感器4来分别检测两轮电动车前后部的倾斜度;第一倾斜角传感器测得倾斜度θ1,第二倾斜角传感器测得倾斜度θ2;s2、根据两轮电动车转把开度计算获得理论扭矩t1;s3、通过在后轮悬架15上安装压力传感器5检测后轮承担压力f,然后计算后轮载重m
载
,m
载
=f/(g
×
cosθ2);其中f为压力传感器检测5的压力值,g为标准重力加速度,θ2为第二倾斜角传感器测得倾斜度;s4、根据扭矩和转速的计算公式,计算出与理论扭矩t1对应的理论转速n1,计算公式为,t1=j
总
δω/δt=(m
载
r2+m
轮
r2/2)
×
2πδn1/δt;其中j
总
为后轮14在载重情况下的总转动惯量,m
载
为后轮载重,m
轮
为后轮自重,r为后轮半径,ω为后轮转动角速度,t为时间,δω/δt为后轮转动角加速度;s5、通过在后轮14处安装转速传感器6检测后轮的实际转速n2;s6、通过ecu控制器1对比实际转速和理论转速来判断是否启动爬坡辅助功能,设定一个转速差阈值a,当n
1-n2≥a时,启动爬坡辅助功能,当n
1-n2<a时,关闭爬坡辅助功能;s7、启动爬坡辅助功能后,ecu控制器1计算需要提供的辅助扭矩t2,根据公式t2=t1n1/n
2-t1计算辅助扭矩t2,其中t1为理论扭矩,n1为理论转速,n2为实际转速;s8、在两轮电动车上中置辅助电机11,启动辅助电机11,辅助电机11通过同步带9驱动后轮14,给后轮14提供辅助扭矩t2,从而实现准确地爬坡辅助。
[0018]
所述步骤s6为,通过ecu控制器1对比实际转速和理论转速,再结合倾斜度θ1和倾斜度θ2的数值来是判断是否启动爬坡辅助功能,设定一个转速差阈值a,当n
1-n2≥a且θ1和θ2均大于零时,启动爬坡辅助功能,当n
1-n2<a或θ1等于零或θ2等于零时,关闭爬坡辅助功能。所述步骤s7为,启动爬坡辅助功能后,ecu控制器1计算需要提供的辅助扭矩t2,根据公式t2=t1n1/n2+t
3-t1计算辅助扭矩t2,其中t1为理论扭矩,n1为理论转速,n2为实际转速,t3为电动
车车把转向附加阻力扭矩;在电动车车把上安装转动角度传感器12检测车把相对应车身的转动角度θ3,当θ3小于等于30
º
时,通过t3=f(θ3)计算转向附加阻力扭矩,f(θ3)为θ3的单调递增函数(该单调递增函数可以通过多次试验后设定相关参数值来构建,或者构建不同θ3的情况下对应的阻力扭矩t3,制作θ3和t3的对应表,然后通过检测到的θ3的数值进行查表获得t3的值),当θ3大于30
º
时,t3=0。
[0019]
依据上述的两轮电动车辅助爬坡控制方法所构建的爬坡辅助系统,构成如图1至3所示,包括ecu控制器1和显示仪表盘2,ecu控制器1上通过无线通讯连接有位于电动车前叉的第一倾斜角传感器3和位于电动车后轮悬挂的第二倾斜角传感器4;ecu控制器1上通过无线通讯还连接有位于电动车后轮悬挂上的压力传感器5和安装在后轮处的转速传感器6;所述ecu控制器1与显示仪表盘2连接,所述电动车后轮内连接有轮毂电机7,轮毂电机7的一侧连接有带轮8;带轮8上通过同步带9连接有辅助电机10,辅助电机10中置在电动车上;辅助电机10上连接有辅助电源11,辅助电机10和辅助电源11均与ecu控制器1连接。
[0020]
所述ecu控制器1上通过无线连接有转动角度传感器12,转动角度传感器12位于电动车车把上;所述第一倾斜角传感器3用于检测电动车前轮位置处运行姿态的倾斜角度,第二倾斜角传感器4用于检测电动车后轮位置处运行姿态的倾斜角度;所述压力传感器5为环形压力传感器,环形压力传感器套接在后轮悬挂和轴承之间;所述轮毂电机7和带轮8之间通过电子离合器13连接。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips