
 商标分类
商标分类  商标转让
商标转让 
一种四臂四驱履带式特种机器人的制作方法
 2021-02-07 09:02:38|
2021-02-07 09:02:38| 310|
310| 起点商标网
起点商标网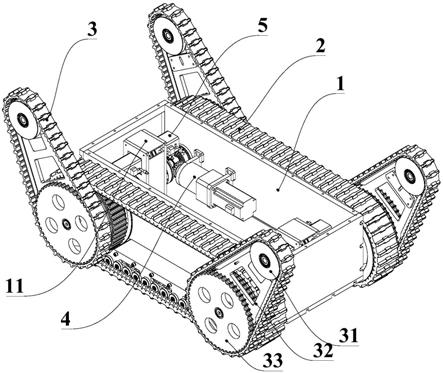
[0001]
本实用新型涉及特种机器人技术领域,尤其涉及一种四臂四驱履带式特种机器人。
背景技术:
[0002]
在发生诸如地震、火灾、水灾和煤矿矿井瓦斯爆炸等大型事故后,周围环境往往会受到严重破坏,受灾现场环境信息无法有效传送到指挥中心,救援人员往往只能冒着生命危险进入现场进行勘察,搜救,当一些次灾害发生时,危及生命的情况就无法避免。因此面对该状况,应用特种地面移动机器人来收集灾后现场信息已经引起各方关注与研究。
[0003]
目前,应用于灾后侦测与救援的机器人大多为摆臂式地面移动机器人,主要有双臂和四臂两种类型,驱动形式一般为单电机带动两个摆臂进行驱动,面对恶劣复杂的环境,比如碎石、沟壑等类型的路况时,可能会导致机器人行走不稳发生倾覆,针对此状况,如果机器人的每个摆臂均能够单独调节角度和运行状态则可以更灵活的调节机器人的重心位置降低倾覆风险。
技术实现要素:
[0004]
本实用新型所要解决的技术问题在于提供一种每个摆臂均能够单独调整以防止机器人倾覆的四臂四驱履带式特种机器人。
[0005]
本实用新型是通过以下技术方案解决上述技术问题的:
[0006]
一种四臂四驱履带式特种机器人,包括本体、设置于本体两侧的行走履带,所述行走履带至少两端分别设置有与行走履带啮合的行走轮,还包括与行走轮配合的摆臂履带,本体内分别设置有与每个行走履带配合驱动行走履带动作的行走驱动机构以及与每个摆臂履带配合能够改变摆臂履带角度的摆臂驱动机构,所述行走履带行走时带动摆臂履带转动。
[0007]
优选地,所述行走轮外周面沿长度方向并排设置有与行走履带啮合的行走齿轮、与摆臂履带啮合的摆臂齿轮。
[0008]
优选地,所述摆臂履带一端与行走轮啮合,另一端通过张紧轮拉紧,所述张紧轮固定于摆臂驱动板上并能够相对摆臂驱动板自由转动,所述摆臂驱动板与行走轮同轴设置并与摆臂驱动机构沿周向固定配合。
[0009]
优选地,所述摆臂履带设置于行走履带相对于本体的外侧,摆臂履带从与行走轮配合的一端到与张紧轮配合的一端呈锥形,摆臂驱动板沿摆臂履带的内部形状变化呈锥形结构支撑摆臂履带。
[0010]
优选地,所述摆臂驱动板的固定端相对于本体的外侧还固定设置有能相对摆臂固定板自由转动并与摆臂履带啮合的从动轮。
[0011]
优选地,所述摆臂驱动机构包括摆臂电机、第一减速器和摆臂轴;所述摆臂电机的动力输出端与减速器的动力输入端分别固定有通过传动带连接的带轮,第一减速器的动力
输出端与摆臂轴同轴固接,行走轮轴向开设有装配孔,所述装配孔上沿固定有一轴套,摆臂轴沿轴向穿过轴套与摆臂驱动板固定连接。
[0012]
优选地,与摆臂电机配合的带轮尺寸比与第一减速器配合的带轮尺寸大。
[0013]
优选地,所述第一减速器为谐波减速器。
[0014]
优选地,所述本体内沿本体行进方向的中轴线固定有传动箱体;所述传动箱体相对行走方向的两侧分别设置有一组所述摆臂驱动机构,两组摆臂驱动机构的摆臂轴同轴设置与两侧的摆臂驱动板固接;本体内在前后行走轮对应位置分别设置有一个传动箱体。
[0015]
优选地,所述行走驱动机构包括行走电机、第二减速器和第一伞齿轮;所述行走电机的动力输出端与第二减速器的动力输入端同轴配合,第二减速器的动力输出端与第一伞齿轮同轴固定配合,行走履带的其中一个行走轮装配孔内的轴套沿周向固定连接有第二伞齿轮,第一伞齿轮与第二伞齿轮的互相啮合且轴向大致垂直。
[0016]
本实用新型提供的四臂四驱履带式特种机器人的优点在于:采用四臂四驱设计,适于极端环境的侦查与救援,方便调节重心,稳定性更强,具有良好的推广前景。
附图说明
[0017]
图1为本实用新型的实施例所提供的四臂四驱履带式特种机器人的示意图;
[0018]
图2为本实用新型的实施例所提供的四臂四驱履带式特种机器人的摆臂履带与行走轮的配合示意图;
[0019]
图3为本实用新型的实施例所提供的四臂四驱履带式特种机器人的摆臂驱动板的示意图;
[0020]
图4为本实用新型的实施例所提供的四臂四驱履带式特种机器人的摆臂驱动机构的示意图;
[0021]
图5为本实用新型的实施例所提供的四臂四驱履带式特种机器人的行走驱动机构的示意图。
具体实施方式
[0022]
为使本实用新型的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本实用新型作进一步的详细说明。
[0023]
如图1所示,本实施例提供了一种四臂四驱履带式特种机器人,包括本体1、设置于本体1两侧的行走履带2,所述行走履带2至少两端分别设置有与行走履带2啮合的行走轮21,每个行走轮21均与以摆臂履带3配合,本体1内设置有与每个行走履带2配合驱动行走履带2动作的行走驱动机构4和与每个摆臂履带3配合能够改变摆臂履带3角度的摆臂驱动机构5,所述行走履带2行走时能够带动摆臂履带3转动。正常工作时,令四个摆臂履带3全部抬起,通过行走驱动机构4驱动行走履带2行走即可,在复杂工况下,可以根据需要通过摆臂驱动机构5调整对应摆臂履带3的角度,使其与支撑面接触对本体1进行支撑,从而使机器人在复杂工况下依然能保持本体1的平衡性,防止机器人发生倾覆的意外,提高通过性。
[0024]
参考图2,所述行走轮21的外周面沿长度方向并排设置有与行走履带2啮合的行走齿轮211、与摆臂履带啮合的摆臂齿轮212;行走履带2转动时,行走轮21会同步驱动摆臂履带3转动,
[0025]
结合图2和图3,所述摆臂履带3一端与行走轮21啮合,另一端通过一张紧轮31拉紧,所述张紧轮31固定于摆臂驱动板32上并能够相对摆臂驱动板32自由转动,所述摆臂驱动板32与行走轮21同轴设置并与摆臂驱动机构5沿周向固定配合,通过摆臂驱动机构5驱动摆臂驱动板32相对行走轮21转动,调整摆臂履带3相对于本体1的角度,在地面不平整时,通过转动摆臂履带3让凹陷位置的摆臂履带3接触支撑面,使整个机器人保持平衡,由于摆臂履带3和同侧行走履带2的行走速度相同,因而能够保持机器人运动的同步性,确保运行稳定。
[0026]
所述摆臂履带3设置于行走履带2相对于本体1的外侧,所述摆臂履带3从与行走轮21配合的一端到与张紧轮31配合的一端呈锥形结构,便于在狭小空间作业,所述摆臂驱动板32的外缘沿摆臂履带3的内部形状变化也大致呈锥形结构,从而对摆臂履带3提供支撑作用,防止在通过复杂地面时因摆臂履带3的形状变化对机器人稳定性的影响。所述摆臂驱动板32与行走轮21配合的一端相对于本体1的外侧还固定设置有与摆臂履带3啮合的从动轮33,所述从动轮33与摆臂驱动板32沿周向自由配合从而能够在行走轮21驱动摆臂履带3转动时跟随摆臂履带3转动,行走轮21和从动轮33分别处于摆臂驱动板3的两侧,从而能够提高摆臂履带3的稳定性,优选实施例中还在摆臂驱动板32的外缘的部分位置设置凹槽34,并在摆臂履带3的内侧设置与凹槽34配合的突起(图未示),以对摆臂履带3的行走路径进行引导和限制;张紧轮31和从动轮33通过轴承与摆臂驱动板32配合即可。
[0027]
参考图4,所述摆臂驱动机构5包括摆臂电机51、第一减速器52和摆臂轴53,所述摆臂电机51的动力输出端与减速器52的动力输入端分别固定有通过传动带54连接的带轮55,第一减速器52的动力输出端与摆臂轴53同轴固接,行走轮21沿轴向开设有装配孔23,装配孔23上固定连接有以轴套24,所述摆臂轴53沿轴向穿过轴套24与摆臂驱动板32固定连接,摆臂轴53与轴套24沿周向自由配合,摆臂电机51转动经过传动带54传动使第一减速器52转动,在具体使用时,可以改变传动带54两端的带轮55尺寸让与摆臂电机51配合的带轮尺寸较大,从而对摆臂电机51的输出进行第一级减速,然后由第一减速器52进行第二级减速后将转动传递给摆臂轴53,从而驱动摆臂履带3转动改变位置,通过使用二级减速的配合,提高了对摆臂履带3转动角度的控制精度,提高输出扭矩。
[0028]
结合图1,为了简化系统,优选实施例中在本体1内沿本体行进方向的中轴线上固定有传动箱体11,所述传动箱体11相对行走方向的两侧分别设置有一组所述摆臂驱动机构5,即摆臂电机51和第一减速器52均固定在传动箱体11上,且两个摆臂轴53同轴设置与两侧的摆臂驱动板32固接,本体1内在前后行走轮对应的位置分别设置一个所述传动箱体11,从而实现对四个摆臂履带3的独立驱动。
[0029]
参考图5,所述行走驱动机构4包括行走电机41、第二减速器42和第一伞齿轮43,所述行走电机41的动力输出端与第二减速器42的动力输入端同轴固接,第二减速器42的动力输出端与第一伞齿轮43同轴固定配合,行走轮21的装配孔23内设置有与轴套24固定配合的第二伞齿轮25,第一伞齿轮43与第二伞齿轮25啮合且轴向基本垂直,从而使摆臂驱动机构5和行走驱动机构4能够设置在不同的方向上防止发生干涉,一个行走履带2仅需要对一个行走轮21提供驱动力即可,因此仅需要对两侧的行走履带2分别设置与其中一个行走轮21配合的行走驱动机构4即可。
[0030]
所述第一减速器52和第二减速器42可以根据需要选用现有产品,由于摆臂履带3
需要对本体1提供支撑力,优选实施中第一减速器52选用谐波减速机,发挥其尺寸小,结构紧凑,输出扭矩大的特点,第二减速器42主要用于驱动行走轮转动,对精度要求不高,因此选用行星减速器即可。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips