
 商标分类
商标分类  商标转让
商标转让 
楼道搬运机器人的制作方法
 2021-02-07 08:02:24|
2021-02-07 08:02:24| 280|
280| 起点商标网
起点商标网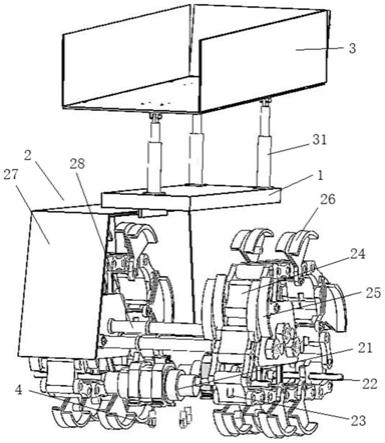
[0001]
本发明涉及楼道搬运机器人。
背景技术:
[0002]
负责将货物从某一地点向其他地点移动的搬运作业的机器人被称作“无人搬运车”或“agv”,在仓库、工厂、港湾等设施内被广为导入。
[0003]
轮式机器人的优点是高速移动性及高操作效率,其问题在于难于跨越较大的障碍物,比如门槛、楼梯等,也不适合在复杂的路面上行驶,如泥泞、碎石地等,因此传统的轮式机器人难以实现全地形行走。一些改进的轮式机构能够部分改进机器人的越障能力:cn2717789提出了一种四轮驱动的机器人平台,前后轮之间用两前轮、两后轮之间分别通过一梯形连杆机构相连,四个车轮与电机之间通过电磁离合器相连,可承受较大的载重,直线行驶和转向灵活,可应用于室内外各种复杂路况,但此机器人体型,车体重,不属于轻便型机器人,也不能爬楼梯。因此,研究出一种能够攀爬楼梯的机器人是目前搬运机器人需要解决的重要问题之一。
技术实现要素:
[0004]
发明目的:本发明的目的是为提供一种可适应楼梯搬运的楼道搬运机器人。
[0005]
为解决上述技术问题,本发明采用如下技术方案:一种楼道搬运机器人,其特征在于:包括上下楼机构、电子控制箱、载物箱;电子控制箱上方设液压伸缩杆,载物箱设于液压伸缩杆上;电子控制箱下设上下楼机构;电子控制箱内设电控装置,所述电控装置与上下楼机构、液压伸缩杆通信连接;所述上下楼机构包括:前后排列的两个电机、机身连接轴,所述电机两端设传动轴,传动轴外套设主齿轮;
[0006]
机身连接轴两端分设t型支撑杆,t型支撑杆呈散射状排列,内链通过外链连接成环形链条,主齿轮与链条啮合,所述链条套设于t型支撑杆外缘;
[0007]
所述t型支撑杆两端设支撑脚,支撑脚与t型支撑杆形成供链条滑动的滑槽;支撑脚与地面的接触面为弧面。
[0008]
进一步的,所述的上下楼机构外设壳体。
[0009]
进一步的,所述支撑脚弧面位置比链条高。
[0010]
进一步的,所述的包括升降轮,所述升降轮设于电子控制箱底部,电控装置控制升降轮收放。
[0011]
进一步的,所述的电子控制箱内设与液压伸缩杆相连的重量感应器。
[0012]
进一步的,所述的t型支撑杆与机身连接轴通过连接板相连。
[0013]
进一步的,所述的连接板通过固定螺母与机身连接轴固定连接。
[0014]
有益效果:本发明提供的一种楼道搬运机器人,与现有技术相比,具有以下优点:
[0015]
1.本发明通过的载物箱通过液压伸缩杆与电子控制箱内的重量传感器相连接,可通过感应载物重量调节力矩,适应不同物品的搬运;
[0016]
2.本发明通过设置上下楼机构,以电机驱动链式传动机构进行上下楼梯的操作,结构简单,操作方便;
[0017]
3.本发明通过在电子控制箱下设升降轮,电子控制相控制升降轮升降,在不同地面上运行。
附图说明
[0018]
图1为本发明上下楼机构结构示意图;
[0019]
图2为本发明楼道搬运机器人结构示意图;
[0020]
图3为本发明使用状态图;
[0021]
其中:1.电子控制箱、2.上下楼机构、3.载物箱、4.升降轮、21.电机、22.传动轴、23.主齿轮、24.内链、25.外链、26.t型支撑杆、27.壳体、28.机身连接轴、31.液压伸缩杆。
具体实施方式
[0022]
下面结合附图及实施例对本发明作进一步的详细说明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
[0023]
实施例1
[0024]
如图2所示的一种楼道搬运机器人,包括上下楼机构2、电子控制箱1、载物箱3;电子控制箱1上方设液压伸缩杆31,载物箱3设于液压伸缩杆31上,电子控制箱1内设与液压伸缩杆31相连的重量感应器;电子控制箱1下设上下楼机构2;电子控制箱1内设电控装置,所述电控装置与上下楼机构2、液压伸缩杆31通信连接;如图1所示,所述上下楼机构2包括:前后排列的两个电机21、机身连接轴28,所述电机21两端设传动轴22,传动轴22外套设主齿轮23上下楼机构2外设壳体27;
[0025]
机身连接轴28两端分设t型支撑杆26,t型支撑杆26与机身连接轴28通过连接板相连;连接板通过固定螺母与机身连接轴28固定连接;
[0026]
t型支撑杆26呈散射状排列,内链24通过外链25连接成环形链条,主齿轮23与链条啮合,所述链条套设于t型支撑杆26外缘;
[0027]
所述t型支撑杆26两端设支撑脚,支撑脚与t型支撑杆26形成供链条滑动的滑槽;支撑脚与地面的接触面为弧面,所述支撑脚弧面位置比链条高;
[0028]
所述的包括升降轮,所述升降轮设于电子控制箱1底部,电控装置控制升降轮收放。
[0029]
电子控制箱1内部有微型处理器,检测装置,语音装置,控制器,摄像头等,由操作人员通过电脑发出信号电子控制箱1接受控制器运行启动电机21,当到地点时停止运动。检测装置,检测路况,当有人通过时,停止工作,语音提示让行人先通过,防止误伤。摄像头时刻关注前方到路是否畅通,保证能够正常前行;
[0030]
装载货物时,将货物放到机器面前,开机,机器通过电子控制箱1中感应装置检测到货物,并且控制液压伸缩杆31上升或下降达到合适高度,再由工作人员将货物放平到载物箱3中,货物入箱,液压伸缩杆31感上的重量传感器感应货物重量,并将重量数据传入电子控制箱1的控制装置内,再反馈到内置系统中计算出托起货物最省力时的力矩,控制液压伸缩杆31三杆的伸长压缩量达到所需要的力矩;
[0031]
工作人员将载物箱3的两侧门锁住防货物滑落;
[0032]
如图3所示,机器爬楼过程,首先通过芯片将行走路线传入电子控制箱1的控制装置中,并控制行走方向,机器人按照设定路线行走,运行过程中电机21带动传动轴22转动,设于传动轴22上的主齿轮23随之转动,主齿轮23带动链条运动;t型支撑杆26两端设支撑脚,支撑脚与t型支撑杆26形成供链条滑动的滑槽;支撑脚与地面的接触面为弧面,所述支撑脚弧面位置比链条高;从而带动支撑脚运动,部分支撑脚登入阶梯高层实现攀爬,部分支撑脚依旧的阶梯底层起到支撑作用;
[0033]
在遇到楼层与楼层间的转角时,电子控制箱1中检测器检测到前方无台阶,控制升降轮放下,撑起机器从楼梯转角过渡区爬上,完成下一步工作。
[0034]
到达地点后,电机21停止,液压伸缩杆31下降,工作人员将货物取下搬入屋中。
[0035]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明。凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips