
 商标分类
商标分类  商标转让
商标转让 
一种楼梯平地搬运机器人的制作方法
 2021-02-07 08:02:25|
2021-02-07 08:02:25| 316|
316| 起点商标网
起点商标网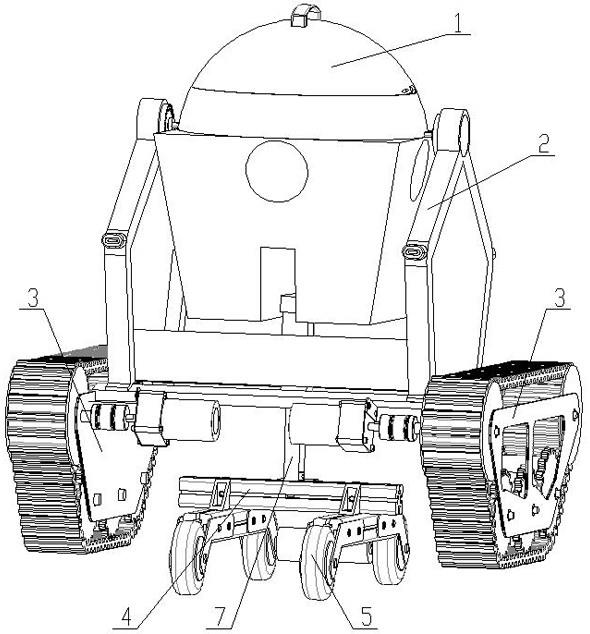
[0001]
本实用新型涉及楼梯平地搬运领域,尤其涉及一种楼梯平地搬运机器人。
背景技术:
[0002]
在日常工作生活中,人们时常需要搬运货物。当遇到货物很多而且需要搬上楼时,人工的搬运不仅费时费力,可能会对货物造成损伤,而且还存在着极大的危险性。现有载物爬楼机一般只能辅助完成爬楼搬运工作,并且存在一些缺陷,比如绕轴类的爬楼机在爬楼运输过程中不够平稳,无法保证货物的稳定性,并且爬楼速度缓慢;现有采用的大多数爬楼机的载物平台往往只有两个垂直面,在由平地行走转变为开始攀爬楼梯时会导致货物大范围摆动,容易造成货物滑落,并且在平地行走时通常仍需人力驱动。因此需要一种爬楼过程稳定,且在爬楼和平地行走时均可搬运且不费力的搬运机器人。
技术实现要素:
[0003]
为解决上述现有的楼梯搬运机器人存在的问题,本实用新型提供了一种楼梯平地搬运机器人。
[0004]
本实用新型为解决上述技术问题所采用的技术方案是:一种楼梯平地搬运机器人,包括物体转运箱、用于运送物体转运箱的机器人框架、用于带动机器人框架在平地运动的轮式行走装置和用于带动机器人框架在楼梯上运动的履带式行走装置;所述履带式行走装置包括两个履带机构,两个履带机构分别安装于机器人框架的两侧,履带机构在与其行走方向垂直的水平方向上的投影呈梯形,且梯形的大端朝上;
[0005]
所述轮式行走装置包括一个安装有车轮的移动车架,移动车架位于机器人框架的下方并位于两个履带机构之间,移动车架中部竖直连接有一根导向滑杆,机器人框架的底部连接有车架安装块,车架安装块的底部连接有辅助支座,导向滑杆向上插设于辅助支座的导向孔内,辅助支座上安装有电动推杆,电动推杆竖直设置且电动推杆的推头向下固定插设于移动车架上,通过电动推杆的伸长运动使辅助支座向上运动并沿着导向滑杆滑动,以便于改变移动车架与机器人框架之间的距离;
[0006]
所述机器人框架上安装有两根棘轮轴,两根棘轮轴分别插设于物体转运箱的两个对称侧壁上,两根棘轮轴均为水平设置并与履带机构的行走方向垂直,两根棘轮轴的轴线相互对齐,通过两根棘轮轴配合将物体转运箱吊装于机器人框架上,棘轮轴上安装有正向棘轮机构和反向棘轮机构,通过正向棘轮机构限制物体转运箱绕棘轮轴正向旋转时的单次转动角度,通过反向棘轮机构限制物体转运箱绕棘轮轴反向旋转时的单次转动角度,从而通过正向棘轮机构和反向棘轮机构配合限制物体转运箱在机器人框架上的往复摆动角度。
[0007]
优选的,所述履带机构在与其行走方向垂直的水平方向上的投影呈等腰梯形,两个履带机构的投影相互重合。
[0008]
优选的,所述移动车架上共安装有四个车轮,其中两个车轮为被电机驱动的主动轮,另外两个车轮为从动轮。
[0009]
优选的,所述棘轮轴的轴线位于物体转运箱的重心位置上方。
[0010]
优选的,所述正向棘轮机构包括套装在棘轮轴上的正向棘轮和配合套装于正向棘轮上的正向棘轮轴承套圈,所述反向棘轮机构包括套装在棘轮轴上的反向棘轮和配合套装于反向棘轮上的反向棘轮轴承套圈,正向棘轮轴承套圈和反向棘轮轴承套圈的外周面均与物体转运箱侧壁上所开设安装孔的孔壁贴合。
[0011]
根据上述技术方案,本实用新型的有益效果是:
[0012]
本实用新型提供的楼梯平地搬运机器人,通过设置轮式行走装置和履带式行走装置,并通过电动推杆使移动车架与机器人框架之间的距离可调,就能够使机器人在车轮驱动行走和履带驱动行走两种状态间进行切换,两种行走状态之间的切换简单,均是由机器驱动行走,能够节约人力,其中履带机构的投影呈梯形且梯形的大端朝上,使履带机构与楼梯接触时能够有较大的接触面积,方便机器人攀爬楼梯。本实用新型中,物体转运箱通过两根棘轮轴配合吊装在机器人框架上,通过棘轮轴上安装的正向棘轮机构和反向棘轮机构配合能够限制物体转运箱在机器人框架上的往复摆动角度,因此在机器人由平地行走转为上楼梯或者由下楼梯转为行走时,物体转运箱能够更为快速的恢复为水平状态,避免货物的大范围摆动,也就能避免货物由于上下楼梯过程中的角度变化而滑落或者碰撞损坏,保证货物的稳定性和安全性。
附图说明
[0013]
图1为本实用新型处于轮式行走装置驱动状态的示意图;
[0014]
图2为本实用新型处于履带式行走装置驱动状态的示意图;
[0015]
图3为轮式行走装置的爆炸示意图;
[0016]
图4为物体转运箱和机器人框架的爆炸示意图;
[0017]
图5为本实用新型在楼梯上行走的示意图。
[0018]
图中标记:1、物体转运箱,2、机器人框架,3、履带机构,4、移动车架,5、车轮,6、电机,7、导向滑杆,8、车架安装块,9、辅助支座,10、电动推杆,11、推头,12、正向棘轮机构,13、反向棘轮机构。
具体实施方式
[0019]
参见附图,具体实施方式如下:
[0020]
一种楼梯平地搬运机器人,包括物体转运箱1、用于运送物体转运箱1的机器人框架2、用于带动机器人框架2在平地运动的轮式行走装置和用于带动机器人框架2在楼梯上运动的履带式行走装置;所述履带式行走装置包括两个履带机构3,两个履带机构3分别安装于机器人框架2的两侧,履带机构3在与其行走方向垂直的水平方向上的投影呈等腰梯形,且等腰梯形的大端朝上,两个履带机构3的投影相互重合,以便于履带机构3与楼梯接触时进行攀爬。
[0021]
轮式行走装置包括一个安装有车轮5的移动车架4,本实施例中,移动车架4上共安装有四个车轮5,其中两个车轮5为被电机6驱动的主动轮,另外两个车轮5为从动轮,移动车架4位于机器人框架2的下方并位于两个履带机构3之间,移动车架4中部竖直连接有一根导向滑杆7,机器人框架2的底部连接有车架安装块8,车架安装块8的底部连接有辅助支座9,
导向滑杆7向上插设于辅助支座9的导向孔内,辅助支座9上安装有电动推杆10,电动推杆10竖直设置且电动推杆10的推头11向下固定插设于移动车架4上,通过电动推杆10的伸长运动使辅助支座9向上运动并沿着导向滑杆7滑动,以便于改变移动车架4与机器人框架2之间的距离,就能够根据电动推杆10的伸缩运动使轮式行走装置和履带式行走装置切换带动机器人框架2行走。
[0022]
机器人框架2上安装有两根棘轮轴,两根棘轮轴分别插设于物体转运箱1的两个对称侧壁上,两根棘轮轴均为水平设置并与履带机构3的行走方向垂直,两根棘轮轴的轴线相互对齐,通过两根棘轮轴配合将物体转运箱1吊装于机器人框架2上,物体转运箱1与棘轮轴的接触位置保证棘轮轴的轴线位于物体转运箱1的重心位置上方,棘轮轴上安装有正向棘轮机构12和反向棘轮机构13,通过正向棘轮机构12限制物体转运箱1绕棘轮轴正向旋转时的单次转动角度,通过反向棘轮机构13限制物体转运箱1绕棘轮轴反向旋转时的单次转动角度,从而通过正向棘轮机构12和反向棘轮机构13配合限制物体转运箱1在机器人框架2上的往复摆动角度;本实施例中,正向棘轮机构12包括套装在棘轮轴上的正向棘轮和配合套装于正向棘轮上的正向棘轮轴承套圈,所述反向棘轮机构13包括套装在棘轮轴上的反向棘轮和配合套装于反向棘轮上的反向棘轮轴承套圈,正向棘轮轴承套圈和反向棘轮轴承套圈的外周面均与物体转运箱1侧壁上所开设安装孔的孔壁贴合。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips