
 商标分类
商标分类  商标转让
商标转让 
一种果园采摘机器人的防颠簸移动机构的制作方法
 2021-02-07 07:02:49|
2021-02-07 07:02:49| 224|
224| 起点商标网
起点商标网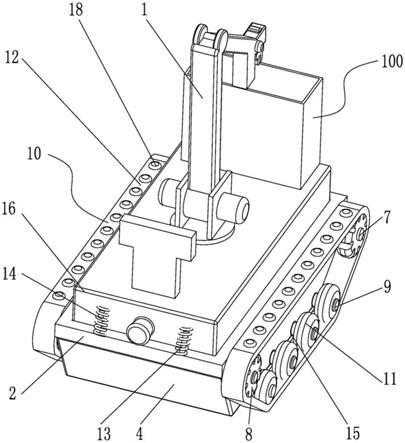
[0001]
本实用新型涉及机器人移动机构技术领域,尤其涉及一种果园采摘机器人的防颠簸移动机构。
背景技术:
[0002]
近年来,随着社会经济的发展,果园的种植面积不断扩大,果园规模化经营的要求越来越迫切,由于果实采摘作业所用劳动力多,许多采摘机械得以推广和运用,而果园采摘机器人的出现,不仅对于适应市场需求、降低劳动强度、提高经济效率有着一定的现实意义,而且对于促进世界农业新技术、促进我国农业科技进步、加速农业现代化进程有着重大的意义。
[0003]
目前,在我国果树的种植多集中在丘陵山地,这类地区地貌类型多,地势起伏大,行走运输用的道路通常沿地形起伏环绕,路面狭窄,凹凸不平,普通采摘机器人在凹凸不平的地面运行势必会产生颠簸,影响到机器人内部构造,造成内部元器件的损伤,降低机器人的使用寿命。
技术实现要素:
[0004]
本实用新型的目的在于提供一种果园采摘机器人的防颠簸移动机构,旨在解决现有技术中的机器人运行产生颠簸,导致机器人损伤的技术问题。
[0005]
为实现上述目的,本实用新型采用的一种果园采摘机器人的防颠簸移动机构,包括机器人主体、安装架、减震垫、底盘、挤压弹簧、驱动电机和移动组件;
[0006]
所述机器人主体与所述安装架可拆卸连接,并位于所述安装架的一侧,所述减震垫与所述安装架固定连接,并位于所述机器人主体与所述安装架之间,所述底盘与所述安装架固定连接,并位于所述安装架远离所述机器人主体的一侧,所述挤压弹簧的一端与所述安装架固定连接,所述挤压弹簧的另一端与所述底盘固定连接,并位于所述安装架与所述底盘之间,所述驱动电机与所述底盘固定连接,并位于所述底盘的内部;
[0007]
所述移动组件包括轮轴、主动轮、转轴、次动轮和链带,所述轮轴与所述驱动电机转动连接,并贯穿所述底盘,且位于所述底盘远离所述安装架的一侧,所述主动轮与所述轮轴固定连接,并位于所述轮轴远离所述驱动电机的一侧,所述转轴与所述底盘转动连接,并位于所述底盘远离所述轮轴的一侧,所述次动轮与所述转轴固定连接,并位于所述转轴远离所述底盘的一侧,所述链带与所述主动轮转动连接,并位于所述主动轮远离所述轮轴的一侧。
[0008]
其中,所述果园采摘机器人的防颠簸移动机构还包括伸缩杆,所述伸缩杆的一端与所述机器人主体固定连接,并位于所述机器人主体靠近所述安装架的一侧,所述伸缩杆的另一端所述安装架固定连接,并位于所述安装架远离所述底盘的一侧。
[0009]
其中,所述果园采摘机器人的防颠簸移动机构还包括复原弹簧,所述复原弹簧的两端分别与所述机器人主体和所述伸缩杆固定连接,并套设于所述伸缩杆的外壁。
[0010]
其中,所述果园采摘机器人的防颠簸移动机构还包括减震圈,所述减震圈与所述底盘固定连接,并位于所述底盘与所述转轴之间。
[0011]
其中,所述果园采摘机器人的防颠簸移动机构还包括防滑棉,所述防滑棉与所述机器人主体固定连接,并位于所述机器人主体的外壁。
[0012]
其中,所述果园采摘机器人的防颠簸移动机构还包括锂电池,所述锂电池与所述机器人主体固定连接,并位于所述机器人主体的内部。
[0013]
其中,所述链带上具有凸起,所述凸起位于所述链带远离所述主动轮的一侧。
[0014]
本实用新型的一种果园采摘机器人的防颠簸移动机构,通过所述机器人主体进行采摘作业,所述安装架连接所述底盘,促使所述底盘安装于所述机器人主体上,所述减震垫采用橡胶材质制成,具有减震效果,并位于所述安装架与所述机器人主体之间,减轻所述安装架对所述机器人主体带来的震动,所述挤压弹簧位于所述底盘和所述安装架之间,具有弹性,随所述底盘的晃动伸缩恢复,对所述安装架起到减震作用,所述驱动电机位于所述底盘的内部,给所述移动组件带来动力,所述驱动电机驱动所述轮轴转动,所述轮轴带动所述主动轮转动,所述主动轮的数量为两个,两个所述主动轮分别设置于所述底盘的长度方向的两端,两个所述主动轮之间转动连接所述链带,所述主动轮的转动促使所述链带跟随转动,带动所述机器人主体进行移动,所述链带增大与地面接触的面积,促使所述移动组件能更平稳的在地面移动,减少震动,所述次动轮位于两个所述主动轮之间,通过所述转轴转动连接于所述底盘上,并与所述链带转动连接,跟随所述主动轮共同转动,加强所述移动组件的稳定性,增强减震效果,所述移动组件设置于所述底盘的两侧,起到平衡作用,促使所述移动组件能够平稳、无震的移动所述机器人主体,所述伸缩杆具有伸缩结构,所述伸缩杆的两端分别连接所述安装架和所述机器人主体,并外壁套设所述复原弹簧,在所述移动组件运行中引起颠簸时,所述伸缩杆随晃动伸缩,通过所述复原弹簧恢复,保证所述机器人主体保持平衡稳定,起到减震效果,所述减震圈采用橡胶材质制成,具有减震作用,减少所述转轴转动对所述底盘产生的震动,所述防滑棉套设于所述机器人主体的外壁,避免所述机器人主体的碰撞造成损伤,同时在所述机器人主体硬物接触时减少对所述机器人主体的震动影响,所述锂电池具有循环充电性能,对所述驱动电机提供电源,促使所述移动组件运行,所述链带上具有所述凸起,增强所述链带接触地面的摩擦力,促使所述移动组件具有更强的抓地性能,使所述移动组件更平稳的在地面运行,减少震动,进而所述果园采摘机器人的防颠簸移动机构能有效减轻采摘机器人的震动感,避免因颠簸造成采摘机器人的损伤,减少采摘机器人的寿命。
附图说明
[0015]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0016]
图1是本实用新型的一种果园采摘机器人的防颠簸移动机构的结构示意图。
[0017]
图2是本实用新型的一种果园采摘机器人的防颠簸移动机构的俯视示意图。
[0018]
图3是本实用新型的一种果园采摘机器人的防颠簸移动机构的剖面a-a示意图。
[0019]
1-机器人主体、2-安装架、3-减震垫、4-底盘、5-挤压弹簧、6-驱动电机、7-轮轴、8-主动轮、9-转轴、10-移动组件、11-次动轮、12-链带、13-伸缩杆、14-复原弹簧、15-减震圈、16-防滑棉、17-锂电池、18-凸起、100-果园采摘机器人的防颠簸移动机构。
具体实施方式
[0020]
下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
[0021]
在本实用新型的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0022]
请参阅图1至图3,本实用新型提供了一种果园采摘机器人的防颠簸移动机构100,包括机器人主体1、安装架2、减震垫3、底盘4、挤压弹簧5、驱动电机6和移动组件10;
[0023]
所述机器人主体1与所述安装架2可拆卸连接,并位于所述安装架2的一侧,所述减震垫3与所述安装架2固定连接,并位于所述机器人主体1与所述安装架2之间,所述底盘4与所述安装架2固定连接,并位于所述安装架2远离所述机器人主体1的一侧,所述挤压弹簧5的一端与所述安装架2固定连接,所述挤压弹簧2的另一端与所述底盘4固定连接,并位于所述安装架2与所述底盘4之间,所述驱动电机6与所述底盘4固定连接,并位于所述底盘4的内部;
[0024]
所述移动组件10包括轮轴7、主动轮8、转轴9、次动轮11和链带12,所述轮轴7与所述驱动电机6转动连接,并贯穿所述底盘4,且位于所述底盘4远离所述安装架2的一侧,所述主动轮8与所述轮轴7固定连接,并位于所述轮轴7远离所述驱动电机6的一侧,所述转轴9与所述底盘4转动连接,并位于所述底盘4远离所述轮轴7的一侧,所述次动轮11与所述转轴9固定连接,并位于所述转轴9远离所述底盘4的一侧,所述链带12与所述主动轮8转动连接,并位于所述主动轮8远离所述轮轴7的一侧。
[0025]
在本实施方式中,所述机器人主体1进行采摘作业,所述安装架2连接所述底盘4,促使所述底盘4安装于所述机器人主体1上,所述减震垫3采用橡胶材质制成,具有减震效果,并位于所述安装架2与所述机器人主体1之间,减轻所述安装架2对所述机器人主体1带来的震动,所述挤压弹簧5位于所述底盘4和所述安装架2之间,具有弹性,随所述底盘4的晃动伸缩恢复,对所述安装架2起到减震作用,所述驱动电机6位于所述底盘4的内部,给所述移动组件10带来动力,所述驱动电机6驱动所述轮轴7转动,所述轮轴7带动所述主动轮8转动,所述主动轮8的数量为两个,两个所述主动轮8分别设置于所述底盘4的长度方向的两端,两个所述主动轮8之间转动连接所述链带12,所述主动轮8的转动促使所述链带12跟随转动,带动所述机器人主体1进行移动,所述链带12增大与地面接触的面积,促使所述移动组件10能更平稳的在地面移动,减少震动,所述次动轮11位于两个所述主动轮8之间,通过
所述转轴9转动连接于所述底盘4上,并与所述链带12转动连接,跟随所述主动轮8共同转动,加强所述移动组件10的稳定性,增强减震效果,所述移动组件10设置于所述底盘4的两侧,起到平衡作用,促使所述移动组件10能够平稳、无震的移动所述机器人主体1,进而所述果园采摘机器人的防颠簸移动机构100能有效减轻采摘机器人的震动感,避免因颠簸造成采摘机器人的损伤,减少采摘机器人的寿命。
[0026]
进一步地,请参阅图1,所述果园采摘机器人的防颠簸移动机构100还包括伸缩杆13,所述伸缩杆13的一端与所述机器人主体1固定连接,并位于所述机器人主体1靠近所述安装架2的一侧,所述伸缩杆13的另一端所述安装架2固定连接,并位于所述安装架2远离所述底盘4的一侧。
[0027]
在本实施方式中,所述伸缩杆13采用伸缩结构,具有伸缩功能,所述伸缩杆13的两端分别连接所述机器人主体1和所述安装架2,在所述安装架2因颠簸而晃动时对所述机器人主体1起到支撑、稳固作用,减轻所述机器人主体1的晃动,减震作用,进而所述果园采摘机器人的防颠簸移动机构100能有效减轻采摘机器人的震动感,避免因颠簸造成采摘机器人的损伤,减少采摘机器人的寿命。
[0028]
进一步地,请参阅图1,所述果园采摘机器人的防颠簸移动机构100还包括复原弹簧14,所述复原弹簧14的两端分别与所述机器人主体1和所述伸缩杆13固定连接,并套设于所述伸缩杆13的外壁。
[0029]
在本实施方式中,所述复原弹簧14具有弹性,被压缩后能回复状态,所述复原弹簧14分别与所述机器人主体1和所述伸缩杆13固定连接,并套设于所述伸缩杆13的外壁,在所述伸缩杆13因颠簸而伸缩变形后,通过所述复原弹簧14恢复初始状态,对所述机器人主体1起到稳固作用,减少震动,进而所述果园采摘机器人的防颠簸移动机构100能有效减轻采摘机器人的震动感,避免因颠簸造成采摘机器人的损伤,减少采摘机器人的寿命。
[0030]
进一步地,请参阅图1,所述果园采摘机器人的防颠簸移动机构100还包括减震圈15,所述减震圈15与所述底盘4固定连接,并位于所述底盘4与所述转轴9之间。
[0031]
在本实施方式中,所述减震圈15采用橡胶材质制成,具有高弹性和高黏性,能有效减轻震动,设置于所述转轴9与所述底盘4之间,对减少所述转轴9转动对所述底盘4引起的震动,进而所述果园采摘机器人的防颠簸移动机构100能有效减轻采摘机器人的震动感,避免因颠簸造成采摘机器人的损伤,减少采摘机器人的寿命。
[0032]
进一步地,请参阅图1,所述果园采摘机器人的防颠簸移动机构100还包括防滑棉16,所述防滑棉16与所述机器人主体1固定连接,并位于所述机器人主体1的外壁。
[0033]
在本实施方式中,所述防滑棉16套设于所述机器人主体1的外壁,对所述机器人主体1起到保护作用,避免所述机器人主体1接触硬物而损伤,同时减轻所述机器人主体1碰撞后带来的震感,进而所述果园采摘机器人的防颠簸移动机构100能有效减轻采摘机器人的震动感,避免因颠簸造成采摘机器人的损伤,减少采摘机器人的寿命。
[0034]
进一步地,请参阅图3,所述果园采摘机器人的防颠簸移动机构100还包括锂电池17,所述锂电池17与所述机器人主体1固定连接,并位于所述机器人主体1的内部。
[0035]
在本实施方式中,所述锂电池17采用采用钴酸锂锂离子电池或钛酸锂锂离子电池或锰酸锂锂离子电池或磷酸铁锂锂离子电池,能进行充电,循环使用,对所述机器人主体1和所述移动组件10提供电力,促使所述果园采摘机器人的防颠簸移动机构100可运行使用,
用户体验感更佳。
[0036]
进一步地,请参阅图1,所述链带12上具有凸起18,所述凸起18位于所述链带12远离所述主动轮8的一侧。
[0037]
在本实施方式中,所述凸起18位于所述链带12远离所述主动轮8的一侧,与地面接触,增强所述链带12与地面的摩擦力,促使所述移动组件10更稳固于地面,并增强所述移动组件10的抓地性能,使所述移动组件10能平稳运行,减少震动,进而所述果园采摘机器人的防颠簸移动机构100能有效减轻采摘机器人的震动感,避免因颠簸造成采摘机器人的损伤,减少采摘机器人的寿命。
[0038]
以上所揭露的仅为本实用新型一种较佳实施例而已,当然不能以此来限定本实用新型之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本实用新型权利要求所作的等同变化,仍属于实用新型所涵盖的范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 机器人

 热门咨询
热门咨询




tips