
 商标分类
商标分类  商标转让
商标转让 
电动单车的制作方法
 2021-02-07 06:02:31|
2021-02-07 06:02:31| 393|
393| 起点商标网
起点商标网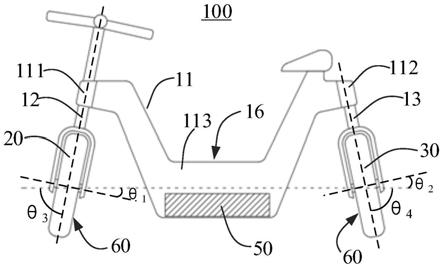
[0001]
本公开涉及自动驾驶技术领域,具体地,涉及一种电动单车。
背景技术:
[0002]
随着物流行业的迅速发展,智能配送行业中的无人配送车逐渐成为技术热点。无人配送车可以节约人力资源,有效地提升处理量。目前两轮无人配送车(简称电动单车)中主要使用车身内部的陀螺仪来保持平衡,在自动行驶时,陀螺仪需要始终保持运转,这样会消耗较多的电量,从而使得两轮无人配送车的续航能力也远小于普通电单车。
技术实现要素:
[0003]
本公开的目的是提供一种电动单车,在基本维持电动单车的平衡的同时,还不会额外过多地增加电动单车的能耗。
[0004]
为了实现上述目的,本公开提供一种电动单车,其包括车体、动力电池以及能够独立驱动的第一车轮和第二车轮,所述车体包括车架主体、第一管柱和第二管柱,所述第一管柱的底端连接有所述第一车轮、顶端连接有骑行把手,并且所述第一管柱绕自身轴线可旋转地设置于所述车架主体的一侧,所述第二管柱的底端连接有所述第二车轮并且绕自身轴线可旋转设置于所述车架主体的另一侧,所述第一车轮和所述第二车轮中心的连线为轮心连线,所述电动单车整体的重心低于所述轮心连线,所述动力电池设置于所述车架主体,
[0005]
所述电动单车具有通过控制所述第一管柱和第二管柱相对于所述车架主体的转动来切换的常规骑行状态和自动行驶状态,
[0006]
在所述常规骑行状态,所述第一管柱相对于所述车架主体可自由转动地设置,所述第二管柱相对于所述车架主体周向锁止,并且所述第二车轮的轮廓面位于所述轮心连线所在的竖直面上,
[0007]
在所述自动行驶状态,所述第一管柱和所述第二管柱分别相对于所述车架主体周向锁止地设置,并且所述第一车轮和所述第二车轮的轮廓面与所述轮心连线所在的竖直面呈相同角度地相交。
[0008]
可选地,在所述自动行驶状态,所述第一车轮的转动轴线和所述第二车轮的转动轴线分别位于所述竖直面上,并且在所述轮心连线的下方相交且与所述轮心连线形成的夹角相同。
[0009]
可选地,所述车体还包括相对于所述车架主体用于分别驱动所述第一管柱和所述第二管柱转动或周向锁止的管柱驱动机构,
[0010]
在所述常规骑行状态,所述管柱驱动机构使所述第一管柱相对于所述车架主体自由转动,并周向锁止所述第二管柱,
[0011]
在所述自动行驶状态,所述管柱驱动机构使所述第一管柱和所述第二管柱分别相对于所述车架主体周向锁止。
[0012]
可选地,所述管柱驱动机构包括与所述第一管柱或所述第二管柱传动相连的电
机,在所述常规骑行状态,对应所述第一管柱的电机的输出轴与所述第一管柱之间通过离合器断开传动,或者处于失电浮动状态,对应所述第二管柱的电机处于得电锁止状态;
[0013]
在所述自动行驶状态,对应所述第一管柱和所述第二管柱的电机均处于得电锁止状态。
[0014]
可选地,所述管柱驱动机构还包括传动连接在所述电机和对应的所述第一管柱或所述第二管柱之间的传动组件,所述传动组件为齿轮组,所述齿轮组的动力输入齿轮与所述电机的输出轴传动连接,所述齿轮组的动力输出齿轮与对应的所述第一管柱或所述第二管柱固定连接。
[0015]
可选地,所述第一管柱和所述第二管柱在所述竖直面上呈八字形布置,且与所述轮心连线之间形成的夹角相同。
[0016]
可选地,所述车架主体包括与所述第一管柱配合的第一连接部、与所述第二管柱配合第二连接部以及位于第一连接部和第二连接部之间的承载部,所述第一连接部、承载部和第二连接部在所述竖直面上呈u型布置,所述动力电池设置于所述承载部,以使所述电动单车整体的重心低于所述轮心连线。
[0017]
可选地,所述承载部内还设置有货物容纳腔,以及/或者,所述承载部的上表面构造成用于承载货物的承载平台。
[0018]
可选地,所述电动单车还包括两个轮毂电机,所述两个轮毂电机分别设置于所述第一车轮和所述第二车轮,以分别为所述第一车轮和所述第二车轮提供行驶动力。
[0019]
可选地,所述车架主体、所述第一管柱和所述第二管柱内部分别具有线缆通道以容纳线缆,所述线缆将所述动力电池的电力分别引向所述两个轮毂电机,所述线缆通道的长度小于所述线缆的长度。
[0020]
通过上述技术方案,当电动单车处于竖立的平衡状态时,重心和地面的距离最小,即重心最低。由于电动单车整体的重心低于轮心连线,当处于自动行驶状态的电动单车偏离了平衡位置,发生沿行进方向前后歪斜时,此时重心总是升高的。在重力的作用下,电动单车总是有使重心回到最低位置的平衡状态的趋势,从而实现了电动单车的自动平衡。因此,能够几乎不耗费电动单车的能耗的情况下,维持自动行驶状态的电动单车的平衡,从而能够增加电动单车的续航里程。另外,本公开中的电动单车既能够实现由使用者来控制平衡的常规骑行状态,也能够实现自动平衡的自动行驶状态,从而拓展了电动单车的使用场景,既能够应用于人们的常规骑行,也能够应用于无人配送等场景。
[0021]
本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
[0022]
附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
[0023]
图1是一种示例性的处于常规骑行状态的电动单车的侧视示意图;
[0024]
图2是一种示例性的处于自动行驶状态的电动单车的侧视示意图;
[0025]
图3是另一种示例性的处于自动行驶状态的电动单车的侧视示意图;
[0026]
图4是一种示例性的处于常规骑行状态的电动单车的第一车轮附近部分结构示意图。
[0027]
附图标记说明
[0028]
100-电动单车;10-车体;11-车架主体;111-第一连接部;112-第二连接部;113-承载部;12-第一管柱;13-第二管柱;16-承载平台;17-骑行把手;20-第一车轮;30-第二车轮;40-管柱驱动机构;41-电机;42-传动组件;50-动力电池;x-轮心连线;60-轮廓面。
具体实施方式
[0029]
以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
[0030]
在本公开中,在未作相反说明的情况下,使用的方位词如“上、下”通常是指是电动单车100处于水平面上的状态下定义的,与电动单车100正常行驶时的“上、下”的方向一致。轮心连线x指的是第一车轮20和第二车轮30的轮心的连线,轮心指的是车轮的转动轴线的中点。具体地,如图1所示,在处于常规骑行状态的电动单车100的侧视图上,轮心连线x指的是第一车轮20和第二车轮30的转动轴线在侧面上的投影的连线。第一车轮20和第二车轮30的轮廓面60指的是轮心所在的车轮面,具体可参照图1和图2中标号60所指向的表面。此外,本公开实施例中使用的术语“第一”、“第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。
[0031]
为了能够保持电动单车100的平衡的同时,还不会额外过多地增加电动单车100的能耗,在本申请中提供了一种电动单车100。如图1-4所示,该电动单车100包括车体10、动力电池50以及能够独立驱动的第一车轮20和第二车轮30。换言之,第一车轮20和第二车轮30可分别由其相对应的驱动源独立地驱动,而不是共同由同一驱动源通过传动组件42来同时驱动。车体10包括车架主体11、第一管柱12和第二管柱13。第一管柱12的底端连接第一车轮20、顶端连接骑行把手17,并且第一管柱12绕自身轴线可旋转地设置于车架主体11的一侧。第二管柱13的底端连接第二车轮30并且绕自身轴线可旋转设置于车架主体11的另一侧。第一车轮20和第二车轮30中心的连线为轮心连线x,电动单车100整体的重心低于轮心连线x。动力电池50设置于车架主体11,为电动单车100供电。
[0032]
电动单车100具有通过控制第一管柱12和第二管柱13相对于车架主体11的转动来切换的常规骑行状态和自动行驶状态。
[0033]
在常规骑行状态,如图1所示,第一管柱12相对于车架主体11可自由转动地设置,从而便于使用者骑行时的自由转向。第二管柱13相对于车架主体11周向锁止,并且第二车轮30的轮廓面60位于轮心连线x所在的竖直面上,换言之,第二车轮30的转动轴线水平设置且与轮心连线x相垂直。当电动单车100直线行驶时,第一车轮20的轮廓面60也位于轮心连线x所在的竖直面上。因此,在常规骑行状态,本公开的第一车轮20和第二车轮30的状态类似于常规的电动单车100,电动单车100的第一车轮20可自由转动便于电动单车100的转向,第二车轮30的周向锁止且第二车轮30的转动轴线垂直于电动单车100的行进方向,因此使用者可利用该电动单车100实现常规的骑行。
[0034]
在自动行驶状态,第一管柱12和第二管柱13分别相对于车架主体11周向锁止地设置,并且第一车轮20和第二车轮30的轮廓面60以相同角度和方向从轮心连线x所在的竖直面中偏转出,使第一车轮20和第二车轮30的轮廓面与轮心连线x所在的竖直面呈相同角度地相交。换言之,电动单车100从常规骑行状态切换至自动行驶状态时,第一管柱12和第二
管柱13朝相同方向绕自身长度方向的轴线转动相同的角度,使得第一车轮20和第二车轮30的轮廓面60与轮心连线x所在的竖直面之间的夹角相等。偏转后的第一车轮20和第二车轮30共同支撑电动单车100,使得电动单车100不会发生沿轮心连线x的方向发生倾倒,而此时电动单车100只会出现垂直轮心连线x的方向的歪斜,而由于电动单车100整体的重心低于轮心连线x,使得处于自动行驶状态的电动单车100能够保持平衡状态。
[0035]
当电动单车100处于自动行驶状态,由于第一车轮20和第二车轮30是分别独立驱动的,在转向时,可通过第一车轮20和第二车轮30的差速控制(第一车轮20和第二车轮30的转速不同)来实现电动单车100的转向。
[0036]
通过上述的技术方案,当电动单车100处于竖立的平衡状态时,重心和地面的距离最小,即重心最低。由于电动单车100整体的重心低于轮心连线x,当处于自动行驶状态的电动单车100偏离了平衡位置,发生沿行进方向前后歪斜时,此时重心总是升高的。在重力的作用下,电动单车100总是有使重心回到最低位置的平衡状态的趋势,从而实现了电动单车100的自动平衡。因此,能够几乎不耗费电动单车100的能耗的情况下,维持自动行驶状态的电动单车100的平衡,从而能够增加电动单车100的续航里程。另外,本公开中的电动单车100既能够实现由使用者来控制平衡的常规骑行状态,也能够实现自动平衡的自动行驶状态,从而拓展了电动单车100的使用场景,既能够应用于人们的常规骑行,也能够应用于无人配送等场景。
[0037]
在本公开中对于第一车轮20和第二车轮30具体偏转多少角度来从常规骑行状态切换至自动行驶状态不作限制。在一种实施方式中,第一车轮20和第二车轮30的轮廓面60从轮心连线x所在的竖直面中偏转90
°
切换至自动行驶状态,此时,在自动行驶状态,第一车轮20的转动轴线和第二车轮30的转动轴线分别位于上述的轮心连线x所在的竖直面,并且第一车轮20的转动轴线和第二车轮30的转动轴线和轮心连线x呈相同角度地向下延伸并相交。如图2所示,第一车轮20和第二车轮30的转动轴线向下延伸,第一车轮20和第二车轮30的转动轴线相交并且位于轮心连线x所在的竖直面内。并且,第一车轮20的转动轴线与轮心连线x之间具有夹角θ1,第二车轮30的转动轴线与轮心连线x之间具有夹角θ2,夹角θ1等于夹角θ2。
[0038]
另外,当第一车轮20偏转后,转动轴线是向下延伸的,即,处于常规骑行状态的电动单车100转向时,第一车轮20的转动轴线不是水平延伸而是向下延伸的,这样会减小转弯半径,便于处于常规骑行状态的电动单车100完成转向。
[0039]
可以理解的是,在其他实施方式中,第一车轮20和第二车轮30的轮廓面60从轮心连线x所在的竖直面中偏转90
°
切换至自动行驶状态,并且第一车轮20的转动轴线和第二车轮30的转动轴线和轮心连线x共线,此时,第一车轮20和第二车轮30的轮廓面60垂直于地面。
[0040]
在本公开中,对管柱的具体延伸方向不作限制,在第一种实施方式中,第一管柱12和第二管柱13可垂直于轮心连线x设置,此时,处于自动行驶状态的电动单车100,第一车轮20和第二车轮30的转动轴线与轮心连线x共线。
[0041]
在第二种实施方式中,如图1-2所示,第一管柱12和第二管柱13在竖直面上呈八字形布置,且第一管柱12和第二管柱13与轮心连线x之间形成的夹角相同。如图2所示,第一管柱12与轮心连线x之间具有夹角θ3,第二管柱13与轮心连线x之间具有夹角θ4,夹角θ3等于夹
角θ4,便于在第一车轮20和第二车轮30以相同速度行驶时,电动单车100整体的行驶路径为直线。由于第一管柱12不是垂直于轮心连线x设置,使得在常规骑行状态需要转向时,通过骑行把手17偏转第一车轮20,第一车轮20向下倾斜,从而可减小转弯半径,便于电动单车100顺利完成转向,转向灵活。而且,呈八字形布置的管柱不会影响常规骑行状态的电动单车100的正常使用,在常规骑行状态下,电动单车100处于直线行驶状态时,第一车轮20和第二车轮30的轴线是平行于地面并且垂直于行进方向的。
[0042]
在本公开中不限制如何切换电动单车100的常规骑行状态和自动行驶状态,例如可通过手动绕管柱的轴线转动并锁止第一车轮20和/或第二车轮30来实现两种状态之间的切换。在本公开的一种实施方式中,车体10还包括相对于车架主体11用于分别驱动第一管柱12和第二管柱13转动或周向锁止的管柱驱动机构40,以使得电动单车100在常规骑行状态和自动行驶状态之间切换。
[0043]
在常规骑行状态,管柱驱动机构40使得第一管柱12相对于车架主体11自由转动,并周向锁止第二管柱13。
[0044]
在自动行驶状态,管柱驱动机构40使得第一管柱12和第二管柱13分别相对于车架主体11周向锁止。
[0045]
通过设置管柱驱动机构40,能够便捷地实现电动单车100在常规骑行状态和自动行驶状态之间切换。例如,可在电动单车100上设置用于控制管柱驱动机构40的控制按钮,通过该控制按钮启动管柱驱动机构40,管柱驱动机构40对第一管柱12和第二管柱13转动做出相应地动作,从而方便地实现常规骑行状态和自动行驶状态的切换。
[0046]
在本公开中对于如何锁止第一管柱12和第二管柱13不作限制,在本公开的一种实施方式中,管柱驱动机构40包括与第一管柱12或第二管柱13传动相连的电机41,即可设置两个电机41,第一管柱12和第二管柱13分别连接有与其传动连接的电机41。在常规骑行状态,对应第一管柱12的电机41的输出轴与第一管柱12之间通过离合器断开传动,或者处于失电浮动状态,从而使得第一管柱12相对于车架主体11自由转动,便于常规骑行状态下的转向。对应第二管柱13的电机41处于得电锁止状态,从而防止第二车轮30发生偏转。电机41的输出轴处于失电浮动状态指的是,电机41在不通电时,第一管柱12转动时会带动电机41的输出轴做出相应的转动,电机41的输出轴不会阻碍第一管柱12的转动。
[0047]
在自动行驶状态,对应第一管柱12和第二管柱13的电机41均处于得电锁止状态,电机41通电,第一管柱12或第一管柱12有转动的趋势时,会带动电机41的输出轴也有转动趋势,由于电机41通电自锁,从而将第一车轮20和第二车轮30锁止在自动行驶状态下。
[0048]
因此,通过在设置对应于第一管柱12和第二管柱13的电机41,既能够实现通过相应的电机41带动第一管柱12和第二管柱13做出相应的旋转,完成常规骑行状态和自动行驶状态的切换,又能够完成对第一管柱12和第二管柱13的相应的锁止,结构简单,成本低。
[0049]
在本公开的一种实施方式中,如图4所示,管柱驱动机构40还包括传动连接在电机41和对应的第一管柱12或第二管柱13之间的传动组件42,传动组件42为齿轮组,齿轮组的动力输入齿轮与电机41的输出轴传动连接,齿轮组的动力输出齿轮与对应的第一管柱或第二管柱固定连接。因此,电机41的动力可通过齿轮组传递至对应的管柱上,从而带动该管柱旋转。通过设置齿轮组的合适的传动比可增加输出至管柱的扭矩,增加可选择的电机41的范围,齿轮组的传动也更加稳定。
[0050]
可以理解的是,在其他实施方式中,也可不设置传动组件42,选择具有合适的转速和输出转矩的电机41,直接将电机41的输出轴与相应的管柱传动连接,从而带动管柱旋转。
[0051]
在本公开中,对车架主体11的具有形状不作限制,可根据需要进行设计,在本公开的一种实施方式中,如图1和图2所示,车架主体11包括与第一管柱12配合的第一连接部111、与第二管柱13配合第二连接部112以及位于第一连接部111和第二连接部112之间的承载部113。第一连接部111、承载部113和第二连接部112在竖直面上呈u型布置。动力电池50设置于承载部113,以使电动单车100整体的重心低于轮心连线x。呈u型布置的车架主体11,既方便与连接与其两侧的第一管柱12和第二管柱13配合,又方便在承载部113布置动力电池50,使电动单车100整体的重心低于轮心连线x。由于电动单车100中的动力电池50、第一车轮20和第二车轮30的属于重量较大的部件,因此,通过将动力电池50布置于车架主体11的最低处即承载部113上,便于通过该重量的分配,使电动单车100整体的重心低于轮心连线x。
[0052]
可选地,承载部113设置有中空的电池容纳腔,电池容纳腔的底部低于轮心连线x,动力电池50设置于电池容纳腔内,从而便于使电动单车100整体的重心低于轮心连线x。
[0053]
可选地,第一连接部111和第二连接部112上均设置有配合通孔,第一管柱12穿设于第一连接部111上的配合通孔,第二管柱13穿设于第一连接部111上的配合通孔,配合通孔的轴线方向与相应的管柱的轴线方向平行。上述的电机41和传动组件42可设置于第一连接部111和第二连接部112处,传动组件42与穿设于配合通孔处的相应的管柱传动连接。
[0054]
为了便于运输货物,在本公开的一种实施方式中,如图3所示,承载部113内还设置有货物容纳腔,以及/或者,承载部113的上表面构造成用于承载货物的承载平台16,从而可通过该电动单车100来运输货物。
[0055]
在本公开中,对管柱驱动机构40的安装位置不作限制,只要能够致动管柱旋转并锁止管柱即可。在本公开的一种实施方式中,如图4所示,管柱驱动机构40安装在车架主体11内部。车架主体11内具有中空结构,管柱驱动机构40设置在车架主体11内,可选地,管柱驱动机构40包括两套电机41和传动组件42,分别设置在第一连接部111和第二连接部112的内部,用于带动相应的管柱旋转。
[0056]
在本公开中对于如何独立驱动第一车轮20和第二车轮30不作限制,在一种实施方式中,电动单车100还包括两个轮毂电机41,两个轮毂电机41分别设置于第一车轮20和第二车轮30,以分别为第一车轮20和第二车轮30提供行驶动力。轮毂电机41将动力系统、传动系统、刹车系统集成到一起,由于通过相应的轮毂电机41来驱动相应的车轮旋转,而省略了传动系统的布置,第一车轮20、第二车轮30和车架主体11之间没有传动关系,从而使得第一车轮20和第二车轮30可不受阻碍的绕相应的管柱旋转,实现常规骑行状态和自动行驶状态的切换。
[0057]
可选地,在其他实施方式中,作为轮毂电机41的替代方式,还可在第一车轮20和第二车轮30上分别设置轮边电机41,通过该轮边电机41来独立地驱动相应的车轮转动。
[0058]
为了对车架主体11两侧的第一车轮20和第二车轮30上的轮毂电机41供电,在本公开的一种实施方式中,车架主体11、第一管柱12和第二管柱13内部分别具有线缆通道以容纳线缆,该线缆将动力电池50的电力分别引向该两个轮毂电机41,线缆通道的长度小于线缆的长度,换言之,线缆通道沿线缆的走线方向上的总长度小于用于向两个轮毂电机41供
电的线缆的总长度,即该线缆具有一定的弯曲余量,该弯曲余量使得第一管柱12和第二管柱13在转动时不会拉扯线缆,保证动力电池50和轮毂电机41之间的电连接的稳固性。
[0059]
以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
[0060]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
[0061]
此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips