
 商标分类
商标分类  商标转让
商标转让 
一种预防激转向的自动驾驶汽车安全装置及其控制方法与流程
 2021-02-07 01:02:07|
2021-02-07 01:02:07| 237|
237| 起点商标网
起点商标网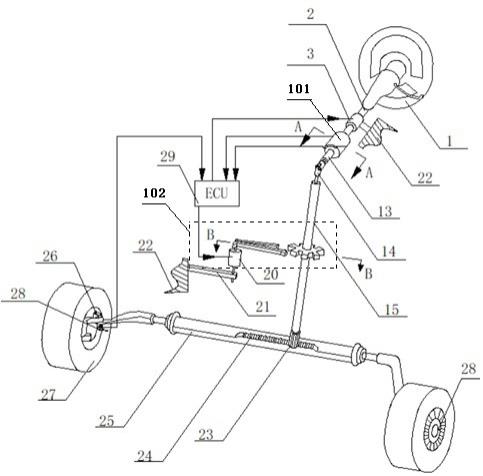
[0001]
本发明涉及一种汽车安全装置及其控制方法,特别是涉及一种预防激转向的自动驾驶汽车安全装置及其控制方法。
背景技术:
[0002]
自动驾驶技术可以提高驾驶的安全性,改善交通效率和节省司机成本。各国都在做自动驾驶汽车的研发,但是自动驾驶技术还没有完全成熟。目前市面上已有的自动驾驶汽车还处于l3级以下,有时需要驾驶员来接管操作。采用自动驾驶技术的汽车尽管一般都安装了abs系统来预防车轮抱死,但是abs系统也有控制失效的情况。当单个车轮抱死,或者全部后轮抱死时,汽车容易突然激转调头,进而与临近车道正常行驶的汽车发生正面碰撞,这是一种非常危险的情况。汽车发生激转时转向轮带动转向盘一起激转,驾驶员或转向电机无法控制转向系统。
技术实现要素:
[0003]
针对上述现有技术缺陷,本发明的任务在于提供一种预防激转向的自动驾驶汽车安全装置,以避免发生激转情况。本发明的另一任务在于提供一种预防激转向的自动驾驶汽车安全装置的控制方法。
[0004]
本发明技术方案是这样的:一种预防激转向的自动驾驶汽车安全装置,包括转向盘、上转向轴、转向感应部件、转向电机、中转向轴、下转向轴、转向锁止机构以及控制器、所述转向盘与所述上转向轴固定连接,所述转向电机用于驱动所述上转向轴转动,所述转向感应部件连接于所述上转向轴与所述中转向轴中间并传递扭矩,所述转向感应部件用于感应所述上转向轴与所述中转向轴的相对转动并向所述控制器发送左转向信号或右转向信号,所述中转向轴通过万向节与所述下转向轴连接,所述下转向轴驱动汽车驱动轮转向,所述转向锁止机构接收所述控制器发送的锁止信号,所述转向锁止机构根据所述锁止信号使所述下转向轴仅能进行左转、仅能进行右转或者不予限制。
[0005]
进一步地,所述转向感应部件包括转向公柱和转向母柱,所述转向公柱与所述上转向轴固定连接,所述转向母柱与所述中转向轴固定连接,所述转向母柱套设于所述转向公柱并相互转动连接,所述转向母柱的截面呈具有缺口的环形,所述转向公柱的侧向设有凸块,所述凸块位于所述缺口处,所述凸块的两侧分别设有左撞击头和右撞击头,所述环形的缺口面分别设有左压力传感器和右压力传感器,所述左撞击头与所述左压力传感器间以及所述右撞击头与所述右压力传感器间均留有间隙。
[0006]
为了转向盘的微小转动及意外触碰对装置的影响,进一步地,所述左撞击头与所述左压力传感器间以及所述右撞击头与所述右压力传感器间均设有第一弹性件。
[0007]
进一步地,所述转向锁止机构包括棘轮、棘杆、张紧杆、锁止步进电机和第二弹性件,所述锁止步进电机的转轴与所述张紧杆连接,所述棘杆和所述张紧杆一端铰接,所述第二弹性件连接于所述棘杆和所述张紧杆之间,所述棘杆受所述控制器控制进行转动使所述
棘轮处于以下三个状态之一:状态一、所述棘杆与所述棘轮的位于所述棘杆与所述棘轮转轴连线的正向半周接触使所述棘轮仅能顺时针转动;状态二、所述棘杆与所述棘轮的位于所述棘杆与所述棘轮转轴连线的反向半周接触使所述棘轮仅能逆时针转动;状态三、所述棘杆与所述棘轮分离。
[0008]
进一步地,所述转向锁止机构设置于所述下转向轴,所述棘轮与所述下转向轴固定连接。
[0009]
进一步地,包括abs传感器,所述abs传感器与所述控制器连接并发送车轮抱死信号。
[0010]
一种预防激转向的自动驾驶汽车安全装置的控制方法,所述控制方法基于上述的预防激转向的自动驾驶汽车安全装置运行,所述控制器接收所述转向感应部件发送的左转向信号或右转向信号,当所述控制器收到所述左转向信号时所述控制器向所述转向锁止机构发送左锁止信号,所述转向锁止机构根据所述左锁止信号使所述下转向轴仅能进行左转;当所述控制器收到所述右转向信号时所述控制器向所述转向锁止机构发送右锁止信号,所述转向锁止机构根据所述右锁止信号使所述下转向轴仅能进行右转,当所述控制器即没有收到左转向信号又没收到右转向信号时不向所述转向锁止机构发送锁止信号,所述转向锁止机构未收到锁止信号时对所述下转向轴的转向不予限制。
[0011]
进一步地,所述控制器接收由abs传感器发送的车轮抱死信号,当所述控制器在收到所述车轮抱死信号且收到所述左转向信号或右转向信号,所述控制器向所述转向锁止机构发送锁止信号。
[0012]
本发明与现有技术相比的优点在于:利用转向感应部件得到转向意图并通过转向锁止机构来阻止车轮进行与转向意图相反的转动,辅助人工或者自动驾驶进行车轮转向的控制。并且在车轮受到地面外力作用产生非主动转向时可以阻止这种转向状态的进一步扩大,帮助人工或者自动驾驶快速控制车轮转向方向,提高安全性。
附图说明
[0013]
图1为预防激转向的自动驾驶汽车安全装置结构正视示意图。
[0014]
图2为图1的a-a剖面图。
[0015]
图3为转向锁止机构在状态一时图1的b-b剖面图。
[0016]
图4为转向锁止机构在状态二时图1的b-b剖面图。
[0017]
图5为转向锁止机构在状态三时图1的b-b剖面图。
具体实施方式
[0018]
下面结合实施例对本发明作进一步说明,但不作为对本发明的限定。
[0019]
请结合图1至图3所示,本实施例涉及的一种预防激转向的自动驾驶汽车安全装置结构是这样的,转向电机3的定子与车身22刚性连接,而转向电机3的转子与上转向轴2刚性连接,上转向轴2与转向盘1固定连接。转向电机3与ecu控制单元29连接并接受其控制。转向盘1的转动直接带动上转向轴2转动。上转向轴2的下段与中转向轴13之间安装转向感应部件101。中转向轴13通过万向节连接下转向轴15。在下转向轴15上安装转向锁止机构102。在下转向轴15的下端为转向小齿轮23,其通过驱动啮合配合的齿条24使转动操作变为移动操
作,与齿条24并列设置的拉杆25两端再通过转向节26连接车轮27,车轮27上装有车轮抱死传感器28。
[0020]
请结合图2所示,其中转向感应部件101的机构包括转向公柱4和转向母柱9,转向公柱4与上转向轴2固定连接,转向母柱9与中转向轴13固定连接,转向母柱9套设于转向公柱4并套装在柱头连接轴12上形成相互转动连接。转向母柱9的截面呈具有缺口的环形,转向公柱4的侧向设有凸块,凸块位于缺口处,在凸块的两侧分别设有左撞击头6和右撞击头5,环形的缺口面分别设有左压力传感器8和右压力传感器7,左压力传感器8上设置左蝶形弹簧11构成第一弹性件且与左撞击头6保持一定间隙,右压力传感器7上设置右蝶形弹簧10构成第一弹性件且与右撞击头5保持一定间隙。左压力传感器8和右压力传感器7分别与ecu控制单元29连接,当左撞击头6克服左蝶形弹簧11与左压力传感器8接触后,左压力传感器8向ecu控制单元29发出左转信号。当右撞击头5克服右蝶形弹簧10与右压力传感器7接触后,右压力传感器7向ecu控制单元29发出右转信号。
[0021]
再请结合图3所示,转向锁止机构102包括棘轮16、棘杆17、第二弹性件即张紧弹簧18、张紧杆19和锁止步进电机20,锁止步进电机20的定子与拐臂21刚性连接,拐臂21与车身22刚性连接。锁止步进电机20的转子与张紧杆19连接,锁止步进电机20接受ecu控制单元29的控制使张紧杆19与棘杆17进行转动。张紧杆19与棘杆17为铰接,两者通过张紧弹簧18连接,在张紧弹簧18的拉压作用下,棘杆17可绕张紧杆19做小角度旋转,紧靠在棘轮16上,棘轮16与下转向轴15固定连接。锁止步进电机20可驱动张紧杆19及棘杆17转动,使其相对于棘轮16处在三个不同状态,分别是状态一:如图3所示,棘杆17处于棘轮16的位于棘杆17与棘轮16转轴连线的正向半周接触使棘轮16仅能顺时针转动,此时车轮27仅能右转;状态二:如图4所示,棘杆17由锁止步进电机20驱动转动后,棘杆17处于棘轮16的位于棘杆17与棘轮16转轴连线的反向半周接触使棘轮16仅能逆时针转动,此时车轮27仅能左转;状态三:如图5所示,棘杆17由锁止步进电机20驱动转动后,不与棘轮16接触,此时车轮27可以任意方向转动。
[0022]
预防激转向的自动驾驶汽车安全装置的控制方法是这样的:汽车行驶时,无论是驾驶员人工驾驶,还是自动驾驶,都会在上转向轴2上产生转矩作用。
[0023]
1)当驾驶汽车右转向时,产生的转矩迫使右撞击头5撞击右方的右蝶形弹簧10,克服右蝶形弹簧10的预紧力后,右撞击头5和右蝶形弹簧10抵靠在右压力传感器7上,右压力传感器7把驾驶员的右转向信号发送给ecu控制单元29。ecu控制单元29同时检测到车轮抱死传感器28有抱死信息时,立即给锁止步进电机20发送状态位置信号,锁止步进电机20带动棘杆17转动到状态一的位置,即可阻止下转向轴15向左旋转。这样车轮27只能按照驾驶意图向右转向,避免了由于抱死造成的向左激转。
[0024]
2)当驾驶汽车左转向时,产生的转矩迫使左撞击头6撞击左方的左蝶形弹簧11,克服左蝶形弹簧11的预紧力后,左撞击头6和左蝶形弹簧11抵靠在左压力传感器8上,左压力传感器8把驾驶员的左转向信号发送给ecu控制单元29。ecu控制单元29同时检测到车轮抱死传感器28有抱死信息时,立即给锁止步进电机20发送状态位置信号,锁止步进电机20带动棘杆17转动到状态二的位置,即可阻止与下转向轴15向右旋转。这样车轮27只能按照驾驶意图向左转向,避免了由于抱死造成的向右激转。
[0025]
3)ecu控制单元29检测到的转向信息不能满足1)或2)时,会给锁止步进电机20发
送状态位置信号,锁止步进电机20带动棘杆17转动到状态三的位置,则可自由转动。
[0026]
以上体现的是人工或者自动驾驶时主动转向的控制,本装置的重要点还体现在,当车轮27抱死后,在人工或者自动驾驶没有转向意图,而车轮27因为地面作用力产生转向时,车轮27通过齿条24、下转向轴15、中转向轴13对转向感应部件101产生反向转矩作用,此时车轮27左转相当于主动控制右转即产生前述的(1)过程,通过转向锁止机构102可避免车轮27进一步发生左转,同样的,车轮27右转相当于主动控制左转即产生前述的(2)过程,通过转向锁止机构102可避免车轮27进一步发生右转,达到辅助车轮27回正的目的,提高安全性。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签:

 热门咨询
热门咨询




tips