
 商标分类
商标分类  商标转让
商标转让 
一种安防机器人底盘用后桥组件的制作方法
 2021-02-03 16:02:35|
2021-02-03 16:02:35| 345|
345| 起点商标网
起点商标网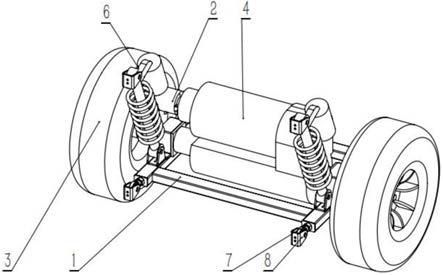
[0001]
本实用新型涉及安防机器人底盘的技术领域,特别是一种安防机器人底盘用后桥组件。
背景技术:
[0002]
安防机器人搭载摄像头、传感器等电器元件,可以代替保安、警察等安保人员对园区进行巡视。为了安防机器人上的各种电气器能更好的发挥作用,需要安防机器人的底盘结构平稳、安全。本实用新型提供一种安防机器人底盘用后桥组件,采用非独立悬架,后轮都有减震,且后桥电机配有后编码器、减速器、抱闸器、差速器能保证大扭矩输出,后编码器能反馈后轮移动速度,角速度,线速度等参数、并通过后轮电机、减速器、抱闸器、差速器来控制速度,同时能有刹车功能,在转向时后轮的速度基本符合阿克曼转角理论,后轮做纯滚动,减小转向力,从而减小电机功率。
技术实现要素:
[0003]
本实用新型的目的在于克服现有技术的不足,提供一种安防机器人底盘用后桥组件,以解决上述技术背景中提出的问题。
[0004]
为实现上述目的,本实用新型通过以下技术方案来实现:
[0005]
一种安防机器人底盘用后桥组件,包括后车架、一个后编码器、两个后轮、一个后桥电机、两个后轮减震器、两个后减震器固定板、两个关节轴承、两个关节轴承固定板及两个后桥电机固定板;
[0006]
所述后车架一侧的左右两端各连接着一关节轴承,每个所述关节轴承轴端均与后车架连接,每个所述关节轴承的孔端与一关节轴承固定板连接,每个所述关节轴承固定板与安防机器人底盘的车架固定连接;所述后桥电机通过后桥电机固定板固定在后车架上,所述后桥电机的输入轴端连接后编码器,所述后桥电机的两个输出轴端分别连接一后轮。
[0007]
上述技术方案中,所述后车架一侧的左右两端均通过螺纹连接着与之相对应关节轴承的轴端,并通过调节螺纹连接的长度来调节后桥组件与安防机器人底盘的车架的平行度。
[0008]
上述技术方案中,所述后桥电机配有减速器、抱闸器和差速器,所述后桥电机通过抱闸器与减速器连接,所述减速器与差速器连接。所述抱闸器和差速器均与安防机器人底盘的控制组件连接;安防机器人底盘的控制组件控制抱闸器的动作,实现刹车功能,安防机器人底盘的控制组件还通过控制差速器的转速,从而控制减速器;所述后桥电机配有减速器、抱闸器和差速器,能保证大扭矩输出,有刹车功能,在转向时后轮的速度基本符合阿克曼转角理论,后轮做纯滚动,减小转向力,从而减小电机功率。
[0009]
上述技术方案中,所述后车架的上端还左右对称各连接一后轮减震器,每个所述后轮减震器一端与后车架固定,另一端固定在后减震器固定板上、并通过后减震器固定板安装在安防机器人底盘的车架上。
[0010]
与现有技术相比,本实用新型的有益效果是:
[0011]
1、后桥组件采用非独立悬架,后轮都有减震,且后桥组件与安防机器人底盘的车架的平行度可调节。
[0012]
2、后桥电机配有后编码器、减速器、抱闸器、差速器能保证大扭矩输出,后编码器能反馈后轮移动速度,角速度,线速度等参数、并通过后轮电机、减速器、抱闸器、差速器来控制速度,同时能有刹车功能,在转向时后轮的速度基本符合阿克曼转角理论,后轮做纯滚动,减小转向力,从而减小电机功率。
附图说明
[0013]
图1为本实用新型的立体图;
[0014]
图2为本实用新型的后视图;
[0015]
图中,1、后车架;2、后编码器;3、后轮;4、后桥电机;5、后轮减震器;6、后减震器固定板;7、关节轴承;8、关节轴承固定板;9、后桥电机固定板。
具体实施方式
[0016]
以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
[0017]
需要说明的是,以下实施例中所提供的图示仅以示意方式说明本实用新型的基本构想,遂图式中仅显示与本实用新型中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
[0018]
参阅图1和图2,一种安防机器人底盘用后桥组件,包括后车架1、一个后编码器2、两个后轮3、一个后桥电机4、两个后轮减震器5、两个后减震器固定板6、两个关节轴承7、两个关节轴承固定板8及两个后桥电机固定板9;
[0019]
所述后车架1一侧的左右两端各连接着一关节轴承7,每个所述关节轴承7轴端均与后车架1连接,每个所述关节轴承7的孔端与一关节轴承固定板8连接,每个所述关节轴承固定板8用于与安防机器人底盘的车架固定连接;所述后桥电机4通过后桥电机固定板9固定在后车架1上,所述后桥电机4的输入轴端连接后编码器2,所述后桥电机4的两个输出轴端分别连接一后轮3;其中后桥电机是双输出轴,两个输出轴分别对应连接两个后轮3,后桥电机型号为t3-800b。
[0020]
本实用新型中,所述后车架1一侧的左右两端均通过螺纹连接着与之相对应关节轴承7 的轴端,并通过调节螺纹连接的长度来调节后桥组件3与安防机器人底盘的车架的平行度。
[0021]
本实用新型中,所述后桥电机4配有减速器、抱闸器和差速器,所述后桥电机4通过抱闸器与减速器连接,所述减速器与差速器连接。所述抱闸器和差速器均与安防机器人底盘的控制组件连接;安防机器人底盘的控制组件控制抱闸器的动作,实现刹车功能,安防机
器人底盘的控制组件还通过控制差速器的转速,从而控制减速器;所述后桥电机4配有减速器、抱闸器和差速器,能保证大扭矩输出,有刹车功能;在转向时,后轮3的速度基本符合阿克曼转角理论,后轮3做纯滚动,减小转向力,从而减小后轮电机4功率。
[0022]
本实用新型中,所述后车架1的上端还左右对称各连接一后轮减震器5,每个所述后轮减震器5一端与后车架1固定,另一端固定在后减震器固定板6上、并通过后减震器固定板 6安装在安防机器人底盘的车架上。
[0023]
以上所述实施例仅表达了本实用新型的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips