
 商标分类
商标分类  商标转让
商标转让 
远程驾驶系统的制作方法
 2021-02-03 16:02:18|
2021-02-03 16:02:18| 230|
230| 起点商标网
起点商标网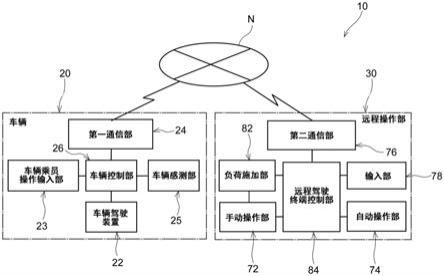
[0001]
本公开涉及一种远程驾驶系统。
背景技术:
[0002]
日本专利申请公开第2006-301723号(jp 2006-301723a)(专利文件1)公开了一种结构,在判断出操作员a至c中的任何一个都不可能继续操纵汽车的情况下,该结构切换至操作员a至c以外的其他操作员。
技术实现要素:
[0003]
专利文件1的结构为其中有多个远程驾驶员的系统。然而,存在单个远程驾驶员远程地驾驶车辆的远程驾驶系统。
[0004]
在这样的远程驾驶系统中,在由于远程驾驶员感到不适等而导致远程驾驶员的手动操作变得困难的情况下,在车辆没有被正常远程驾驶的情况下车辆的行驶状态可能会发生波动,从而还存在改进空间。
[0005]
鉴于上述情况,本公开的目的是提供一种远程驾驶系统,其中在单个远程驾驶员远程驾驶的情况下,如果出现远程驾驶员的手动操作处于困难的状态,则能够抑制车辆的行驶状态的波动。
[0006]
第一方案的远程驾驶系统包括:手动操作部,其设置在远程地驾驶车辆的远程操作部处,并且在所述手动操作部处由远程驾驶员对所述车辆执行手动驾驶;自动操作部,其设置在所述远程操作部处,并且基于由感测所述车辆的行驶状态的车辆感测部感测到的所述行驶状态的信息,来执行所述车辆的自动驾驶;输入部,其设置在所述远程操作部处,并且操作员信息被输入至所述输入部,所述操作员信息表示存在所述远程驾驶员的驾驶操作处于困难的状态;以及控制部,其在所述操作员信息被输入至所述输入部的情况下,执行将所述车辆的驾驶操作从所述手动操作部切换至所述自动操作部的控制。
[0007]
在第一方案的远程驾驶系统中,在单个远程驾驶员远程驾驶的情况下,如果出现远程驾驶员的手动操作有困难的状态,则表示存在远程驾驶员的驾驶操作处于困难的操作员信息被输入至输入部。当操作员信息被输入至输入部时,控制部执行将车辆的驾驶操作从手动操作部切换至自动操作部的控制。然后,基于由车辆感测部感测到的车辆的行驶状态的信息,自动操作部执行车辆的自动驾驶。由此,车辆的正常远程驾驶得以继续执行。因此,在单个远程驾驶员远程驾驶的情况下出现远程驾驶员的手动操作处于困难的状态的情况下,可以抑制车辆的行驶状态的波动。
[0008]
在第二方案的远程驾驶系统中,在所述远程操作部处设置有通知部,在将驾驶操作从所述手动操作部切换至所述自动操作部的情况下,所述通知部通知所述远程驾驶员正在执行所述车辆的自动驾驶。
[0009]
在第二方案的远程驾驶系统中,在驾驶操作从手动操作部切换至自动操作部的情况下,所述通知部通知远程驾驶员正在执行车辆的自动驾驶。由此,远程驾驶员容易认识到
车辆处于自动驾驶状态,并且可以减少远程驾驶员的不必要的操作。
[0010]
第三方案的远程驾驶系统的通知部是负荷施加部,在所述驾驶操作从所述手动操作部切换至所述自动操作部的情况下,所述负荷施加部向所述手动操作部的驾驶操作施加负荷。
[0011]
在第三方案的远程驾驶系统中,在驾驶操作从手动操作部切换至自动操作部的情况下,负荷施加部向手动操作部处的驾驶操作施加负荷。由此,当远程驾驶员操作手动操作部时,与通常的驾驶操作时的负荷相比,远程驾驶员感受到更大的负荷,并且可以认识到车辆不处于手动操作状态。以此方式,即使没有给出视觉或听觉通知,远程驾驶员也可以认识到车辆处于自动驾驶状态。因此,可以抑制在给出视觉或听觉上的自动驾驶通知的情况下远程驾驶员看不见或听不到与操作状态有关的信息。
[0012]
第四方案的远程驾驶系统还包括:生物信息获取部,其获取所述远程驾驶员的生物信息;以及判定部,其基于在所述生物信息获取部获取的生物信息,判定是否存在所述远程驾驶员的所述驾驶操作处于困难的状态,其中,在所述判定部判定为存在所述远程驾驶员的所述驾驶操作处于困难的状态的情况下,所述操作员信息被输入至所述输入部。
[0013]
在第四方案的远程驾驶系统中,判定部基于由生物信息获取部获取的生物信息,判定是否存在远程驾驶员的驾驶操作处于困难的状态。然后,如果判定部判定为存在所述远程驾驶员的所述驾驶操作处于困难的状态,则控制部将车辆的驾驶操作从手动操作部切换至自动操作部。以这种方式,在远程驾驶员感到不适的情况下,无论远程驾驶员的意图如何,都将驾驶操作自动切换至自动操作部。因此,相比于在操作上有困难的远程驾驶员继续驾驶操作的情况,车辆的行驶状态的波动可以被抑制。
[0014]
如上所述,根据本公开,具有如下的出色效果:在单个远程驾驶员远程驾驶的情况下,如果出现远程驾驶员的手动操作处于困难的状态,能够抑制车辆的行驶状态的波动。
附图说明
[0015]
基于下述附图详细描述优选实施例,其中:
[0016]
图1是示出第一实施例相关的远程驾驶系统的概要的图;
[0017]
图2是示出第一实施例相关的远程操作部的硬件结构的框图;
[0018]
图3是示出第一实施例相关的车辆以及远程操作部的功能结构的框图;
[0019]
图4是示出第一实施例相关的远程操作部的手动操作和自动操作之间的切换处理的流程的流程图;
[0020]
图5是示出第二实施例相关的远程驾驶系统的功能结构的框图;
[0021]
图6是示出第二实施例相关的远程操作部的硬件结构的框图;以及
[0022]
图7是示出第二实施例相关的远程操作部的手动操作与自动操作之间的切换处理的流程的流程图。
具体实施方式
[0023]
[第一实施例]
[0024]
如图1所示,第一实施例相关的远程驾驶系统10具有车辆20和远程操作部30。车辆20和远程操作部30通过预定网络n(通信部)连接,使得信息可以双向传输。注意,在本实施
例中,作为示例,车辆20和远程操作部30在不经由服务器的情况下执行信息的传输,但是也可以经由未示出的服务器来执行信息的传输。
[0025]
如图3所示,车辆20被构造为包括车辆驱动装置22、车辆乘员操作输入部23、第一通信部24、车辆感测部25和车辆控制部26。车辆驱动装置22被构造为包括未示出的发动机、变速器等,并且基于由车辆乘员操作输入部23或远程操作部30的操作来驱动车辆20。车辆乘员操作输入部23被构造为包括未示出的转向盘、加速踏板和制动踏板,并由未示出的车辆乘员(驾驶员)操作。
[0026]
第一通信部24连接到网络n。在第一通信部24和随后描述的第二通信部76之间的双向信息传输是可能的。车辆感测部25通过感测例如车辆20的转向角、速度、加速度等来感测车辆20的行驶状态。此外,由车辆感测部25感测到的车辆20的各种类型的信息经由第一通信部24和网络n被传输至第二通信部76(远程操作部30)。车辆控制部26被构造为包括未示出的ecu(电子控制单元),并执行对车辆20的各个部的控制。注意,从由车辆乘员进行的车辆20的手动(驾驶)操作向由远程驾驶员p进行的车辆20的远程手动(驾驶)操作的切换,是例如通过车辆乘员按压未图示出的远程驾驶按钮来执行的。
[0027]
接下来描述远程操作部30。
[0028]
(硬件结构)
[0029]
图2所示的远程操作部30具有ecu 32、通信接口38、显示装置42、麦克风44、扬声器46、扭矩单元48、输入/输出接口49、操作单元50以及切换开关62。在以下描述中,i/f为接口的缩写。ecu 32和上述各个结构经由输入/输出接口49连接以便能够彼此通信。
[0030]
ecu 32具有cpu(中央处理单元)33、rom(只读存储器)34、ram(随机存取存储器)35和存储装置36。
[0031]
rom 34存储各种类型的程序和各种类型的数据。ram 35作为工作区临时存储程序或数据。存储装置36由例如闪存rom(只读存储器)构造,并且存储各种类型的程序,包括操作系统和各种类型的数据。由于cpu 33执行记录在rom 34或存储装置36中的各种类型的程序,诸如远程驾驶处理程序等,因此cpu 33执行由车辆20(见图1)的未示出的车辆乘员的手动操作和远程驾驶员p(见图1)的远程驾驶之间的切换控制。
[0032]
通信i/f 38经由网络n(见图1)连接至车辆20(见图1)的未示出的通信i/f。显示装置42由未示出的监视器和触摸面板构造。麦克风44获取远程驾驶员p的语音。由麦克风44获得的语音信息被传输至车辆20。扬声器46将从车辆20传输的车辆乘员的语音信息和其他信息转换为语音,并输出语音。扭矩单元48根据来自ecu 32的指令将负荷(扭矩)施加到下文将进行描述的转向盘52。
[0033]
操作单元50被构造为包括转向盘52、加速踏板54和制动踏板56。转向盘52被构造为能够通过由远程驾驶员p绕轴旋转而改变车辆20的转向角。加速踏板54被构造为能够通过被遥控驾驶员p踩下而改变车辆20的速度和加速度。制动踏板56被构造为通过被远程驾驶员p踩下而使车辆20减速或停止。
[0034]
切换开关62由远程驾驶员p在接通和断开之间进行切换。在接通切换开关62的状态下,通过远程驾驶员p在远程操作部30处的手动操作来远程地驾驶车辆20。在切换开关62断开的状态下,通过在远程操作部30的ecu 32的自动操作来远程地驾驶车辆20。
[0035]
[功能结构]
[0036]
远程操作部30在执行远程驾驶程序时,通过使用上述硬件资源来实现各种类型的功能,从而远程地驾驶车辆20。在下文中描述远程操作部30实现的功能结构。注意,存在在描述图1和图2所示的结构时省略了个别附图编号的情况。
[0037]
如图3所示,远程操作部30具有手动操作部72、自动操作部74、第二通信部76、输入部78、负荷施加部82和远程驾驶终端控制部84作为其功能结构。由于远程操作部30的cpu 33读取存储在rom 34或存储装置36中的程序和信息,并扩展和执行ram 35中的程序,因此实现了这些各个功能结构。
[0038]
手动操作部72设置在远程操作部30处。在手动操作部72处,由远程驾驶员p执行车辆20的手动驾驶(手动操作)。诸如在手动操作部72的操作量之类的信息被传输至远程驾驶终端控制部84。
[0039]
自动操作部74设置在远程操作部30处。在自动操作部74处,基于由车辆感测部25感测的车辆20的行驶状态的信息来执行车辆20的自动驾驶(自动操作)。具体地,自动操作部74自动地执行各驾驶操作,诸如根据车辆20的行驶路径来校正转向角以及改变速度和加速度以保持本车辆与前方车辆和后方车辆之间的车辆间距离,以及根据交通信号的颜色停车和发车等。
[0040]
第二通信部76设置在远程操作部30处。此外,第二通信部76连接至网络n,并且在第二通信部76与第一通信部24之间的双向信息传输是可能的。
[0041]
输入部78设置在远程操作部30处。在输入部78处,输入表示存在远程驾驶员p的驾驶操作处于困难的状态的操作员信息。在本实施例中,切换开关62处的on(接通)信息和off(断开)信息用作输入到输入部78的操作员信息的示例。
[0042]
切换开关62处的on信息是指作为将远程操作部30处的手动操作切换至自动操作的请求的信息。off信息是指作为将远程操作部30处的自动操作切换至手动操作的请求的信息。即,on信息被输入到输入部78的情况是指,由于某种原因(感觉不适等)远程驾驶员p难以进行手动操作并且请求自动操作。off信息被输入到输入部78的情况是指远程驾驶员p希望返回到手动操作。
[0043]
负荷施加部82设置在远程操作部30处。负荷施加部82是通知部的示例。在操作部从手动操作部72被切换至自动操作部74的情况下,负荷施加部82向远程驾驶员p(见图1)通知车辆20正在执行自动驾驶。具体地,在将驾驶操作从手动操作部72切换至自动操作部74的情况下,负荷施加部82施加负荷到手动操作部72处的驾驶操作,从而向远程驾驶员p通知(使远程驾驶员p认识到)存在自动驾驶状态。
[0044]
远程驾驶终端控制部84是控制部的示例,并且设置在远程操作部30处。在操作员信息被输入到输入部78的情况下,远程驾驶终端控制部84执行将车辆20的驾驶操作从手动操作部72切换至自动操作部74的控制。
[0045]
[操作和效果]
[0046]
接下来描述第一实施例的远程驾驶系统10的操作。
[0047]
图4示出了由ecu 32(参见图2)进行的远程驾驶处理的流程的流程图。注意,对于远程驾驶系统10(车辆20和远程操作部30)的各个构件,参考图1至图3的各个附图,并省略了个别的附图编号。
[0048]
在ecu 32处,由于cpu 33从rom 34或存储装置36读取远程驾驶处理程序,并扩展
和执行ram 35中的程序,因此远程驾驶处理被执行。此处,对以下情况进行说明:由于车辆乘员按下远程驾驶按钮,因此车辆20的驾驶操作从车辆乘员的手动操作转换至远程驾驶员p的手动驾驶。
[0049]
在步骤s10中,cpu 33设定远程手动操作。由此,在远程操作部30处,由远程驾驶员p进行的车辆20的远程驾驶成为可能。然后,程序进行至步骤s12。
[0050]
在步骤s12中,cpu 33确认是否存在用于从远程操作部30处的远程驾驶员p的手动操作切换至自动操作的信息。具体地,cpu 33确认在输入部78处是否输入了操作员信息。然后,程序进行至步骤s14。
[0051]
在步骤s14中,cpu 33判定是否存在至自动操作的切换。如果判定为存在用于切换至自动操作的信息(s14:是),则程序进行至步骤s17。如果判定为不存在用于切换至自动操作的信息(s14:否),则程序进行至步骤s26。
[0052]
在步骤s17中,cpu 33设定远程自动操作。由此,在远程操作部30处,基于来自车辆感测部25感测的信息,启动车辆20的自动操作。然后,程序进行至步骤s18。
[0053]
在步骤s18中,cpu 33通过操作负荷施加部82而向手动操作部72施加负荷。因此,当远程驾驶员p驾驶并操作手动操作部72时,远程驾驶员p感觉到负荷。然后,程序进行至步骤s20。
[0054]
在步骤s20中,cpu 33确认是否存在用于从远程操作部30的自动操作切换至远程驾驶员p的手动操作的信息。具体地,cpu 33确认在输入部78处是否输入了操作员信息(请求)。然后,程序进行至步骤s22。
[0055]
在步骤s22中,cpu 33判定是否存在至手动操作的切换。如果判定为存在用于切换至手动操作的信息(s22:是),则程序进行至步骤s24。如果判定为不存在用于切换至手动操作的信息(s22:否),则程序进行至步骤s20。
[0056]
在步骤s24中,cpu 33设定远程手动操作并操作负荷施加部82,以及取消施加到手动操作部72的负荷。由此,当远程驾驶员p驾驶并操作手动操作部72时,远程驾驶员p很难感觉到负荷(远程驾驶员p很容易感觉到可以进行手动操作)。然后,程序进行至步骤s26。
[0057]
在步骤s26中,cpu 33确认车辆20的车辆乘员是否已关闭了远程驾驶按钮。即,cpu 33确认结束远程驾驶的指令。然后,程序进行至步骤s28。
[0058]
在步骤s28中,cpu 33判定是否结束了远程驾驶。如果判定为远程驾驶已结束(s28:是),则程序进行至步骤s30。如果判定为远程驾驶继续(s28:否),则程序进行至步骤s12。
[0059]
在步骤s30中,cpu 33设定车辆20的车辆乘员的手动操作。然后,程序结束。
[0060]
如上所述,在远程驾驶系统10中,在单个远程驾驶员p远程驾驶的情况下,如果出现远程驾驶员p的手动操作处于困难的状态,则表示存在远程驾驶员p的驾驶操作处于困难的状态的操作员信息被输入到输入部78。当操作员信息被输入到输入部78时,远程驾驶终端控制部84执行将车辆20的驾驶操作从手动操作部72切换至自动操作部74的控制。然后,基于由车辆感测部25感测到的车辆20的行驶状态的信息,自动操作部74执行车辆20的自动驾驶。由此,继续执行车辆20的正常远程驾驶。因此,在单个远程驾驶员p远程驾驶的情况下出现远程驾驶员p的手动操作处于困难的状态的情况下,能够抑制车辆20的行驶状态的波动。
[0061]
另外,在远程驾驶系统10中,在将驾驶操作从手动操作部72切换至自动操作部74的情况下,作为通知部的示例的负荷施加部82向手动操作部72的驾驶操作施加负荷,由此向远程驾驶员p通知正在执行车辆20的自动驾驶。由此,远程驾驶员p很容易认识到车辆20处于自动驾驶状态,并且可以减少远程驾驶员p的不必要操作。
[0062]
另外,在远程驾驶系统10中,在将驾驶操作从手动操作部72切换至自动操作部74的情况下,负荷施加部82向手动操作部72处的驾驶操作施加负荷。由此,当远程驾驶员p操作手动操作部72时,远程驾驶员p感觉到与通常的驾驶操作时的负荷相比更大的负荷,并且可以认识到车辆20不处于手动操作状态。以这种方式,即使没有给出视觉或听觉通知,远程驾驶员p也可以认识到车辆20处于自动驾驶状态。因此,可以抑制在给出自动驾驶的视觉或听觉通知的情况下远程驾驶员p看不见或听不到与操作状态有关的信息。
[0063]
[第二实施例]
[0064]
接下来描述与第二实施例有关的远程驾驶系统90。
[0065]
图5所示的远程驾驶系统90具有车辆20和远程操作部100。车辆20和远程操作部100通过预定网络n(通信部)连接,使得信息可以双向传输。注意,在本实施例中,作为示例,车辆20和远程操作部100在不经过服务器的情况下进行信息的传输,但是也可以经由未示出的服务器来进行信息的传输。
[0066]
远程操作部100与第一实施例的不同之处在于,生物信息获取部104和判定部106被添加至远程操作部30(参见图3)。注意,与第一实施例的远程驾驶系统10(见图1)基本相同的结构由相同的附图标记表示,其描述被省略。
[0067]
图6所示的远程操作部100与第一实施例的不同之处在于生物传感器102被添加至远程操作部30(参见图2)。
[0068]
为了检测远程驾驶员p(参见图1)的身体状况,生物传感器102检测诸如脉搏、脑电波、血压、心率等的生物信息。此外,生物传感器102将检测到的生物信息传输(输出)至ecu 32。
[0069]
图5所示的生物信息获取部104通过使用生物传感器102(参见图6)获取远程驾驶员p的生物信息。作为示例,由生物信息获取部104获取的远程驾驶员p的生物信息被传输至判定部106。
[0070]
基于在生物信息获取部104处获取的远程驾驶员p的生物信息,判定部106判定是否存在远程驾驶员p的驾驶操作处于困难的状态。例如,针对脉搏、脑电波、血压、心率等分别预先设定了能够进行正常驾驶操作的情况的数值范围。如果超处其中一个数值范围,则判定为存在远程驾驶员p的驾驶操作处于困难的状态。
[0071]
如果在判定部106处判定为存在远程驾驶员p的驾驶操作处于困难的状态,则将上述的操作员信息输入至输入部78。随后,该操作员信息被传输至远程驾驶终端控制部84。
[0072]
[操作和效果]
[0073]
接下来描述第二实施例的远程驾驶系统90的操作。
[0074]
图7示出了由ecu 32(参见图6)执行的远程驾驶处理的流程的流程图。注意,对于远程驾驶系统90的各个结构,请参考图5和图6,并且单独的附图编号被省略。另外,与第一实施例基本相同的步骤以相同的步骤编号来标注,并且其说明被省略。
[0075]
第二实施例的流程图与第一实施例的流程图的不同之处在于向其添加了步骤s15
和步骤s16。
[0076]
在步骤s14中,cpu 33判定是否存在至自动操作的切换。如果判定为存在用于切换至自动操作的信息(s14:是),则程序进行至步骤s17。如果判定为不存在用于切换至自动操作的信息(s14:否),则程序进行至步骤s15。
[0077]
在步骤s15中,cpu 33通过生物信息获取部104获取远程驾驶员p的生物信息。然后,程序进行至步骤s16。
[0078]
在步骤s16中,基于判定部106的判定结果,cpu 33判定是否存在远程驾驶员p的驾驶操作处于困难的状态。如果判定为远程驾驶员p可以进行驾驶操作(s16:是),则程序进行至步骤s26。如果判定为远程驾驶员p进行驾驶操作是困难的(s16:否),则程序进行至步骤s17。
[0079]
如上所述,在远程驾驶系统90中,基于在生物信息获取部104获取的生物信息,判定部106判定是否存在远程驾驶员p的驾驶操作处于困难的状态。随后,如果判定部106判定为存在远程驾驶员p的驾驶操作处于困难的状态,则远程驾驶终端控制部84将车辆20的驾驶操作从手动操作部72切换至自动操作部74。以此方式,在远程驾驶员p感到不适的情况下,无论远程驾驶员p的意图如何,驾驶操作均自动切换至自动操作部74。因此,与在操作上有困难的远程驾驶员继续驾驶操作的情况相比,车辆20的行驶状态的波动能够被抑制。
[0080]
注意,本发明不限于上述各个实施例。
[0081]
通知部不一定设置在远程驾驶系统10、90中。此外,作为通知部的另一示例,可以通过在显示装置42上进行显示来给出通知,而无需使用负荷施加部82。或者,作为通知部的另一示例,可以通过来自扬声器46的语音来给出通知。
[0082]
在远程驾驶系统90中,只要有脉搏、脑电波、血压和心率中的至少一项作为生物信息就足够了。此外,作为生物信息的另一示例,可以使用远程驾驶员p的体温信息。此外,可以设置感测远程驾驶员p的就座姿势的姿势感测部,并且生物信息可以包括与远程驾驶员p的姿势有关的信息。
[0083]
注意,除cpu 33之外的各种类型的处理器中的任何一个都可以执行在上述各个实施例中cpu 33通过读取软件(程序)来执行的处理。在这种情况下的处理器的示例包括诸如fpga(现场可编程门阵列)等的pld(可编程逻辑器件),其电路结构可在制造后更改,或诸如asic(专用集成电路)等的专用电路,其是具有为执行特定处理的唯一目的而设计的电路结构的处理器,等等。此外,上述处理可以由这些各种类型的处理器之一执行,或者可以通过组合两个或更多个相同类型或不同类型的处理器(例如,多个fpga,或cpu和fpga的组合等)来执行。此外,这些各种类型的处理器的硬件结构更具体地是结合诸如半导体元件等的电路元件的电路。
[0084]
此外,上述实施例描述了远程驾驶处理程序被预先存储(安装)在rom34或存储装置36中的方案,但是本公开不限于此。可以以记录在诸如cd-rom(光盘只读存储器)、dvd-rom(数字多功能磁盘只读存储器)、usb(通用串行总线)存储器等的记录介质上的形式提供程序。此外,远程驾驶处理程序可以是经由网络n从外部装置下载的形式。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签:

 热门咨询
热门咨询




tips