
 商标分类
商标分类  商标转让
商标转让 
自动驾驶车辆的传感器灯单元的制作方法
 2021-02-03 16:02:32|
2021-02-03 16:02:32| 271|
271| 起点商标网
起点商标网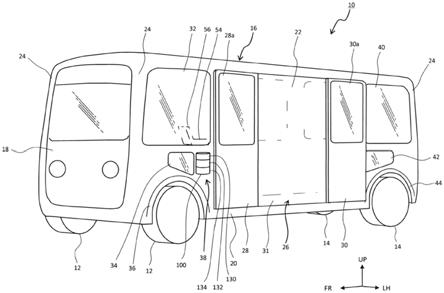
自动驾驶车辆的传感器灯单元
[0001]
相关申请的交叉引用
[0002]
本申请要求于2019年7月19日提交的日本专利申请no.2019-133541的优先权,该日本专利申请的全部内容包括说明书、权利要求书、说明书附图和说明书摘要在内通过引用的方式而被合并于此。
技术领域
[0003]
本公开涉及一种被设置于自动驾驶车辆上的传感器灯单元。
背景技术:
[0004]
在具有自动驾驶功能的自动驾驶车辆中,一般会搭载有摄像机、激光雷达等的传感器装置,并在实施车辆周围的障碍物检测的同时进行行驶。
[0005]
在国际公开wo2018/030285公报中,公开了一种在车辆的两侧面的转向灯内设置摄像机,并在车辆的后部的尾灯内设置激光雷达的结构。
技术实现要素:
[0006]
摄像机和激光雷达的测量原理不同,从而能够取得不同的信息。但是,在上述国际公开wo2018/030285公报中,由于将摄像机和激光雷达设置在不同的位置处,因此摄像机和激光雷达的视点大不相同。因此,例如,融合性地使用检测信息、或者补充性地使用检测信息等情况也变得较为困难。另一方面,如若仅将摄像机和激光雷达接近配置,则会产生使各自的视野缩小等的弊端。
[0007]
本公开的目的在于,提出一种在自动驾驶车辆中将摄像机等的被动型传感器(passive type sensor)装置、和激光雷达等主动型传感器(active type sensor)装置接近配置的新方式。
[0008]
本公开所涉及的自动驾驶车辆的传感器灯单元,其特征在于,具备:被动型传感器装置,其对来自外部的电磁波进行检测并取得图像数据;主动型传感器装置,其对所照射出的电磁波的反射波进行检测并取得检测数据;转向灯,所述被动型传感器装置、所述主动型传感器装置和所述转向灯在上下方向上并排配置,并被安装在左右车辆侧壁的外表面上。
[0009]
在本公开的一个方式中,其特征在于,其中,所述自动驾驶车辆具备:第一前侧窗,其被设置在左右所述侧壁的上部处;第二前侧窗,其在与所述第一前侧窗的下端相比靠下方、且与所述第一前侧窗的后端相比靠前方处,被设置在左右所述侧壁上;滑动门,其被设置在至少一方的所述侧壁上,并在前后方向上滑动,在设置了所述滑动门的侧面上,所述传感器灯单元被设置在与所述第一前侧窗的下端相比靠下方、且与所述第二前侧窗的后端相比靠后方、并且与所述滑动门向前方滑动了的情况下的前端相比靠前方处。
[0010]
在本公开的一个方式中,其特征在于,其中,所述自动驾驶车辆具备:第一后侧窗,其被设置在左右所述侧壁的上部处;第二后侧窗,其在与所述第一后侧窗的下端相比靠下方、且与所述第一后侧窗的前端相比靠后方处,被设置在左右所述侧壁上;滑动门,其被设
置在至少一方的所述侧壁上,并在前后方向上滑动,在设置了所述滑动门的侧面上,所述传感器灯单元被设置在与所述第一后侧窗的下端相比靠下方、且与所述第二后侧窗的前端相比靠前方、并且与所述滑动门向后方滑动了的情况下的后端相比靠后方处。
[0011]
在本公开的一个方式中,其特征在于,其中,在所述侧壁上,在所述第二前侧窗或者所述第二后侧窗的下方处设置有翼子板,所述翼子板具有沿着车轮的轮廓而被形成为拱形的鼓出部,所述传感器灯单元被设置在所述鼓出部的上方处。
[0012]
在本公开的一个方式中,其特征在于,其中,在所述自动驾驶车辆的内部,在设置了所述滑动门的所述侧壁的所述第一前侧窗的附近处设置有操作员的操作部,所述传感器灯单元被设置于在车辆前后方向上至少一部分与所述操作部重叠的位置处。
[0013]
在本公开的一个方式中,其特征在于,其中,所述被动型传感器装置为取得可视图像数据的摄像机,且在所述自动驾驶车辆中的设置了滑动门的侧面上,被设置于能够对所述滑动门的外表面进行拍摄的位置处。
[0014]
在本公开的一个方式中,其特征在于,其中,所述转向灯被设置于最上部处,所述被动型传感器装置被设置于最下部处,所述主动型传感器装置被设置在与所述被动型传感器装置邻接的上部处。
[0015]
在本公开的一个方式中,其特征在于,其中,所述传感器灯单元具备单一的外壳。
[0016]
在本公开的一个方式中,其特征在于,其中,在所述外壳上设置有排出孔,所述排出孔将从所述主动型传感器装置和该外壳之间的间隙进入的水排出。
[0017]
在本公开的一个方式中,其特征在于,其中,所述被动型传感器装置为,取得所述自动驾驶车辆中的电子镜用的可视图像数据的摄像机。
[0018]
在本公开的一个方式中,其特征在于,其中,所述被动型传感器装置所取得的图像数据和所述主动型传感器装置所取得的检测数据以融合的方式被利用于车辆周围的障碍物的检测处理中。
[0019]
在传感器灯单元中,能够在使被动型传感器装置和主动型传感器装置接近配置的基础上,消除或减少给彼此的水平视场带来的影响。
附图说明
[0020]
图1为上下车口关闭的状态下的自动驾驶车辆的立体图。
[0021]
图2为上下车口打开的状态下的自动驾驶车辆的立体图。
[0022]
图3为表示自动驾驶车辆的内部的图。
[0023]
图4为从另一角度表示自动驾驶车辆的内部的图。
[0024]
图5为表示传感器灯单元的外观的立体图。
[0025]
图6为自动驾驶车辆的局部性的侧视图。
[0026]
图7为沿着图6中的aa线的概略性的剖视图。
[0027]
图8为另一实施方式所涉及的自动驾驶车辆的立体图。
具体实施方式
[0028]
以下,在参照附图的同时,对实施方式进行说明。虽然在说明中,为了容易理解而示出了具体的形态,但这些形态是对实施方式进行例示的形态,除此以外,还能够采用各种
各样的实施方式。
[0029]
图1以及图2为,表示实施方式所涉及的自动驾驶车辆10的外观的概略性的立体图。图中的坐标系中的fr轴表示车辆前方向、up轴表示上方向、lh轴表示对前方向进行的情况下的左手方向(在以下的附图中也同样)。
[0030]
在实施方式中,设想了自动驾驶车辆10为不特定多数乘员所共乘的公共汽车的情况。自动驾驶车辆10例如在特定的场地内沿着规定的路线而以较低的低速(例如30km/h)进行行驶,并且在途中为了让乘客出入而在公共汽车停车站处停车。图1示出了关闭上下车口26的行驶状态的自动驾驶车辆10。图2示出了自动驾驶车辆10停车并打开上下车口26从而设为能够进行乘客的上下车的状态。
[0031]
自动驾驶车辆10为,设置有一对前轮12和一对后轮14的四轮车。车身16为大致长方体,并且被形成为前后以及左右大致对称的形状。在图1中,图示了构成长方体的面的前壁18、左侧的侧壁20,在图2中,还图示了右侧的侧壁22。前壁18、侧壁20、22、再加上后壁23(参照图3)均是大部分由钢板和树脂板的车窗(窗)构成。此外,在车身16上,在俯视观察时的四角处设置有在上下方向上延伸的柱24。
[0032]
在左侧的侧壁20的中央部处,设置有自动驾驶车辆10的上下车口26。在上下车口26附近处,设置有作为一对滑动门的前滑动门28和后滑动门30。前滑动门28的下部被钢板所覆盖,在前滑动门28的上部设置有作为车窗的前滑动门窗28a。同样地,后滑动门30也具备下部的钢板以及上部的后滑动门窗30a。在上下车口26被关闭的情况下,通过前滑动门28向后方滑动、后滑动门30向前方滑动,并且前滑动门28的后端面与后滑动门30的前端面接触,从而成为图1所示的状态。在上下车口26被打开的情况下,前滑动门28向前方滑动,且前端到达第一左前侧窗32的后端附近。而且,后滑动门30向后方滑动,且到达第一左后侧窗40的前端附近。其结果为,成为图2所示的状态,乘客能够通过上下车口26而进行上下车。虽然在图2中,对于从上下车口26看得见的车内而言,只不过仅简要地图示了地板31和右侧的侧壁22,但实际上设置有省略了图示的乘客用的椅子等(参照图3、图4)。此外,虽然省略了图示,但在地板31之下收纳有斜坡,其能够顺畅地连接上下车口26处的地板31和地面。通过设定斜坡,从而可使利用轮椅的乘客、老人或身体不方便的乘客等的上下车较容易。
[0033]
在左侧的侧壁20上,在前部且上部处设置有四边形形状的较大的车窗即第一左前侧窗32。从第一左前侧窗32能看见被设置于车内的作为操作部的肘靠54以及触摸面板56。关于肘靠,将在后文进行叙述。在侧壁20的第一左前侧窗32的下端的下方处,设置有大致梯形形状的较小的车窗即第二左前侧窗34。第二左前侧窗34的后端与第一左前侧窗32的后端相比而位于前方。在侧壁20上,第二左前侧窗34的下部成为用于左侧的前轮12的翼子板。在翼子板上,设置有沿着前轮12的轮廓而被形成为拱形的鼓出部36。鼓出部36是指,与侧壁20的一般部位相比而稍稍向车宽方向外侧鼓起的部位。
[0034]
另外,第一左前侧窗32中的“第一”的名称、和第二左前侧窗34中的“第二”的名称仅仅是对两者进行辨别的名称,并非设置特别的排序的意思。此外,“左前”的名称表示自动驾驶车辆10中的位于左前的第一侧窗或者第二侧窗。在本说明书中,除了左前之外,还存在标注了前、后、左后等的位置的情况。
[0035]
此外,虽然第一侧窗(例如第一左前侧窗32)和第二侧窗(例如第二左前侧窗34)可以如图1、图2等所示那样作为单独的侧窗而被形成,但也可以作为连成一体的侧窗而被形
成。在以连成一体的方式而被形成的情况下,将位于上部的部位称为第一侧窗,将从第一侧窗的下部向下方突出的部位称为第二侧窗。
[0036]
在左侧的侧壁20上存在有区域38,所述区域38被划分在与打开状态下的前滑动门28的前端相比靠前方、与第一左前侧窗32的下端相比靠下方、与第二左前侧窗34的后端相比靠后方、并且与翼子板的鼓出部36相比靠上方处(也参照图6)。侧壁20上的该区域38通过由钢板构成的平坦的外表面而构成,在外表面上设置有传感器灯单元100。传感器灯单元100具备转向灯部130、激光雷达部132以及摄像机部134。由于传感器灯单元100为传感器和灯被组合而成的部件,因此被赋予了该名称。关于传感器灯单元100,将在后文中进行详细叙述。
[0037]
左侧的侧壁20的后部的结构与侧壁20的前部的结构大致相同。即,在侧壁20的后部且上部处设置有第一左后侧窗40,在第一左后侧窗40的下方处设置有第二左后侧窗42。在第二左后侧窗42的下方处,也设置有翼子板的鼓出部44。但是,在图1以及图2所示的示例中,第二左后侧窗42被形成为与第二左前侧窗34相比在前后方向上较长。因此,在侧壁20的后部处不存在与前部的区域38相对应的区域,而且,也未设置有传感器灯单元100。
[0038]
虽然省略了图示,但在右侧的侧壁22上未设置有上下车口26、前滑动门28以及后滑动门30,取而代之设置有钢板以及树脂板。但是,右侧的侧壁22上的、除此以外的部位的结构,基本上是与左侧的侧壁20的结构相同的。即,在右侧的侧壁22上,在前部处设置有第一右前侧窗以及第二右前侧窗、前轮翼子板的鼓出部,在后部处设置有第一右后侧窗、第二右后侧窗以及后轮翼子板的鼓出部。而且,在右侧的侧壁22的前部处,在与左侧的侧壁20左右对称的位置处设置有与左侧的侧壁20相同的传感器灯单元100。
[0039]
接下来,参照图3以及图4来对自动驾驶车辆10的内部进行说明。图3以及图4为,表示自动驾驶车辆10的车厢内的概略性的结构的立体图。如上述那样,由于自动驾驶车辆10被作为公共汽车来利用,因此车厢内的中央的地板31成为乘客站立乘车的空间、或者用于供坐在轮椅上的乘客设置轮椅的空间。此外,在前壁18、后壁23以及右侧的侧壁22附近处设置有乘客用的座位50。
[0040]
在自动驾驶车辆10中,设置有操作员用的操作员座52。操作员座52为折叠式,在图3中,操作员座52被展开,并以能够落座的方式被安置。操作员座52被配置于第一左前侧窗32的后端和处于关闭状态的前滑动门28的前端之间的附近处。
[0041]
在操作员座52的左前方处,设置有用于供坐在操作员座52上的操作员放置胳膊并进行操作的肘靠54。肘靠54被配置在第一左前侧窗32的下端且后端附近处。
[0042]
在肘靠54的前端上,设置有从肘靠54的上表面起向上前方延伸的触摸面板56。在触摸面板56上,除了设置有在自动驾驶模式下操作员实施起动、停止等的驾驶控制的指示的按钮以外,还设置有实施对自动驾驶车辆10中的各种设备(方向指示灯、喇叭、前照灯、空调器、刮水器等)进行指示的按钮。操作员通过坐在操作员座52上,并在将胳膊放置于肘靠54上的同时,用手对触摸面板56进行操作,从而能够输入驾驶控制的指示、对设备的指示等。
[0043]
在肘靠54的上表面上设置有盖60,在盖60的内部设置有收纳部58。在收纳部58中,收纳有在自动驾驶车辆10的手动驾驶模式下用于供操作员输入驾驶控制指示的机械式操作部。在将盖60闭合了的状态下,肘靠54的上表面是平坦的。而且,通过打开盖60并拉起机
械式操作部,从而使机械式操作部被安置在肘靠54的上表面上。
[0044]
此外,在肘靠54的上表面上,也设置有用于通过手动操作而对自动驾驶车辆10输入紧急停止指示的机械式的紧急停止按钮62。所谓机械式的按钮,并非是像触摸面板56那样通过程序来显示的按钮,而是指实际上物理存在的按钮。在操作员按压了紧急停止按钮62的情况下,紧急停止按钮62将转换为电信号的紧急停止信号传递给驾驶控制装置,从而使自动驾驶车辆10停车。
[0045]
以此方式,肘靠54和触摸面板56为,被配置有成为操作员的操作对象的按钮等的部位,且能够称之为自动驾驶车辆10中的操作部。如后文所述那样,在车辆前后方向进行观察时,传感器灯单元100被配置在与操作部重叠的位置处。
[0046]
在触摸面板56的右前方处,设置有显示与自动驾驶车辆10相关的信息的显示器64。显示器64被配置为,在从坐在操作员座52上的操作员进行观察时,被排列在触摸面板56的右侧。在图4所示的示例中,显示器64上的显示在上下方向上被分为三段。假定上段64a和中段64b为电子镜。例如,在上段64a中,以能够切换的方式显示车辆前方的图像或者车辆后方的图像。在中段64b中,合成显示车辆后方的图像和车辆两侧方的图像。这些电子镜的图像从被安装在自动驾驶车辆10上的摄像机取得,车辆侧方的图像由内置于上述的传感器灯单元100的摄像机部134中的摄像机拍摄而成。在显示器64的下段64c中,显示有例如车辆速度、外部气温、接下来所停靠的停靠站名等的信息。
[0047]
在此,对自动驾驶车辆10的自动驾驶功能进行简单说明。自动驾驶车辆10能够在包括自动驾驶模式以及手动驾驶模式在内的多个驾驶模式下进行驾驶。自动驾驶模式是指,以驾驶控制为主并由计算机实施的驾驶模式。在驾驶控制中,包括换档控制、车速控制、或者转向控制。在车速控制中,包括自动驾驶车辆10的起动控制、停止控制以及加减速控制。在自动驾驶模式下,自动驾驶车辆10的计算机利用包括被设置于传感器灯单元100中的传感器在内的各种传感器的检测结果来实施驾驶控制。在自动驾驶模式中,也能够自动地实施例如上下车口26的开闭、斜坡的设置和收纳等的与乘客的出入相关的控制。另外,即使在自动驾驶模式的情况下,也能够通过乘坐在自动驾驶车辆10中的操作员对作为操作部的触摸面板56进行操作,从而实施例如从停止状态起的起动指示、与乘客的上下车相关的控制指示等。此外,也能够代替操作员而采用如下方式,即,由远程的管理中心来实施起动指示、与乘客的上下车相关的控制指示等。
[0048]
手动驾驶模式是指,自动驾驶车辆10不实施自动驾驶,而是由乘坐于自动驾驶车辆10中的操作员实施自动驾驶车辆10的驾驶控制的模式。操作员通过从肘靠54中取出的机械式操作部而实施针对自动驾驶车辆10的手动驾驶操作。
[0049]
另外,操作员是指,乘坐于自动驾驶车辆10中并参与自动驾驶车辆10的控制的人员。在自动驾驶模式下,由于以管理中心或者自动驾驶车辆10本身为主来实施驾驶控制,因此操作员实施驾驶控制的机会较少。但是,操作员能够对例如车辆的起动、停止等进行指示,从而可以说是参与了自动驾驶车辆10的控制。在手动驾驶模式中,操作员起到了作为直接实施自动驾驶车辆10的驾驶操作的驾驶员的作用,主动地参与了自动驾驶车辆10的控制。
[0050]
在实施方式中,假定了自动驾驶车辆10为具有接受来自蓄电池的电力供给的驱动电机的电动车辆的情况。该蓄电池为能够充放电的二次电池,并定期地通过外部电力而被
充电。在电动车辆中,也包括作为原动机而搭载了发动机以及驱动电机的混合动力车辆。此外,在电动车辆中,也包括通过由燃料电池发电所产生的电力来对驱动电机进行驱动的氢汽车。
[0051]
接下来,参照图5~图7,对传感器灯单元100进行说明。图5为对传感器灯单元100的外观进行说明的示意性的立体图。图6为自动驾驶车辆10的局部的侧视图。图7为沿着图5中的aa线的剖视图。
[0052]
传感器灯单元100具备树脂制的外壳102。外壳102具备被形成为大致圆筒形状的筒壁104、位于筒壁104的上端的上壁106以及位于下端的下壁108、和位于筒壁104的中途的两个隔壁110、112。在筒壁104上,也可以设置用于与侧壁20面接触的平坦的部位。外壳102的内部通过隔壁110、112而被分为三部分。外壳102的最上部成为收纳有转向灯136的转向灯部130,中间部成为被内置有激光雷达138的激光雷达部132,最下部成为被内置有摄像机140的摄像机部134。
[0053]
转向灯136为,在自动驾驶车辆10向左或向右转弯的情况下实施方向指示的灯,例如使用发出橙色的发光二极管而被形成。转向灯136也被使用于危险状态的亮灯中。
[0054]
激光雷达138为laser imaging detection and ranging的简称,并且为通过照射属于光的波段(紫外光、可视光、红外光)的电磁波并对从障碍物反射的反射波进行检测,从而取得障碍物的距离、甚至障碍物的方向等的检测数据的主动型传感器装置。也存在有通过对电磁波进行空间性地扫描,从而作为检测数据而取得二维或者三维的图像数据的激光雷达。作为电磁波,使用了相位一致的激光。在激光雷达138中,包括半导体激光器等发光装置、镜子等的扫描机构、受光装置、信号处理电路等。如图7所示那样,激光雷达138的前端被嵌入到外壳102的设置于筒壁104上的贯穿孔114中。
[0055]
摄像机140为,接受属于可视光的波段的电磁波从而取得可视图像数据的被动型传感器装置。摄像机140包括透镜等的光学机构、cmos(complementary metal oxide semiconductor:互补金属氧化物半导体)、ccd(charge coupled device:电荷耦合器件)等的图像传感器、和信号处理电路等。如图5所示那样,在外壳102的筒壁104上,设有被设置了摄像机140的透镜140a的贯穿孔116。
[0056]
在传感器灯单元100中,转向灯部130、激光雷达部132、摄像机部134在上下方向上并排配置。在配置于上下方向的情况下,除了能够抑制车辆前后方向的扩展之外,还会产生接下来所叙述的优点。
[0057]
转向灯部130被设置于传感器灯单元100的最上部。通过设为最上部,从而使转向灯136的光易于被周围的车辆、行人等目视确认。
[0058]
激光雷达部132和摄像机部134在上下方向上邻接配置,激光雷达138和摄像机140不会相互遮挡水平方向的视场。因此,激光雷达138和摄像机140均能够很容易地实施成为自动驾驶车辆10的行驶中所必须的周围的障碍物检测。
[0059]
另一方面,通过将激光雷达部132设置在中间部,从而使激光雷达138被位于上侧的转向灯部130局部性地限制了上方的视场,并且被位于下侧的摄像机部134局部性地限制了下方的视场。但是,一般情况下,即使看不到上空的一部分以及地面的一部分,也不会给自动驾驶车辆10的行驶带来影响。
[0060]
同样地,通过将摄像机部134设置于最下部,从而使摄像机140被位于上侧的转向
灯部130以及激光雷达部132局部性地限制了上方的视场。但是,即使看不到上空的一部分,也不会给自动驾驶车辆10的行驶带来影响。与其这样说,不如说是,通过使摄像机部134被设置于最下部,从而使摄像机140具有了易于对上下车口26的下部附近进行拍摄的优点。例如,通过摄像机140对路面进行高精度拍摄并对水洼或凹凸进行检测,从而自动驾驶车辆10能够停止在成为乘客容易出入的位置、或者斜坡的设置变得容易的位置处。此外,例如,通过摄像机140对上下车过程中的乘客的脚下或者轮椅进行高精度拍摄,从而容易确认乘客的上下车是否安全地实施了。
[0061]
激光雷达部132和摄像机部134分别在中间部和最下部处被接近配置。因此,激光雷达138和摄像机140能够从大致相同的角度捕捉周围的障碍物,从而使融合性地或者补充性地利用从激光雷达138所取得的数据和从摄像机140所取得的数据的情况变得容易。作为融合性的障碍物检测处理的示例,可列举有使由激光雷达138所取得的检测数据、和由摄像机140所取得的图像数据重迭而实现分辨率的提高的处理、对障碍物的特征(例如是人还是物、是硬还是软等)进行检测的处理、利用若干视场角的差异来获得3d图像的处理等。此外,作为补充性的处理的示例,可列举有在激光雷达138或者摄像机140中的一方发生了故障的情况下,取而代之利用另一方的数据的方式。
[0062]
由激光雷达138取得的数据和由摄像机140取得的数据的融合性的或者补充性的利用也会弥补激光雷达138的缺点以及摄像机140的缺点。由于激光雷达138需要有照射电磁波的过程,因此与摄像机140相比而具有时间分辨率以及空间分辨率变低的倾向。因此,通过在激光雷达138的数据中融合摄像机140的数据,从而能够进行弥补激光雷达138的时间分辨率以及空间分辨率的低下的处理。另一方面,摄像机140在夜间等情况下光量减少、拍摄精度降低,相对于此,由于激光雷达138照射激光,因此即使在夜间也能够以与白天同样的精度来进行拍摄。因此,通过在摄像机140的数据中融合激光雷达138的数据,从而能够进行弥补摄像机140的拍摄精度的低下的处理。
[0063]
如图6所示那样,传感器灯单元100被设置在区域38内。即,传感器灯单元100被设置在与打开状态下的前滑动门28的前端相比靠前方、与第一左前侧窗32的下端相比靠下方、与第二左前侧窗34的后端相比靠后方、并且与翼子板的鼓出部36相比靠上方的范围内。传感器灯单元100被安装于侧壁20的外表面上,且与侧壁20相比向外侧扩展(也参照图7)。但是,在其附近,位于传感器灯单元100的下方的鼓出部36也与侧壁20的一般部位相比而向外侧鼓起。因此,传感器灯单元100和鼓出部36这双方均处于向外侧鼓起的状态。这在例如使从自动驾驶车辆10的旁边穿过的车辆、摩托车、自行车、行人等意识到由传感器灯单元100以及鼓出部36构成的车宽的展宽方面是很有效的。此外,通过展宽部集中,从而能够在设计上也给人精炼的印象。另外,在实施方式中,假设了鼓出部36的厚度小于传感器灯单元100的厚度的情况,从而鼓出部36几乎不会影响摄像机140的视场。
[0064]
将传感器灯单元100设置在区域38内,从而即使在较大地确保第一左前侧窗32以及第二左前侧窗34方面也是有用的。在图6所示的示例中,假设将传感器灯单元100安装在第二左前侧窗34的位置上。在该情况下,为了确保传感器灯单元100的安装高度,需要将第一左前侧窗32的下端向上方移动,不得不使第一左前侧窗32形成得较小。此外,由于第二左前侧窗34因图3所示的车内的结构上的原因而难以向前方移动,因此第二左前侧窗34也不得不形成得较小。相对于此,由于区域38位于与翼子板(以及鼓出部36)的拱形的中央相比
而靠后方处、且到达鼓出部36为止的上下方向距离较长,因此易于确保设置传感器灯单元100的空间。
[0065]
对于传感器灯单元100而言,在车辆前后方向上观察时,至少一部分与作为操作部的肘靠54以及触摸面板56重叠。因此,操作员会被肘靠54以及触摸面板56遮挡了视场,从而难以从第一左前侧窗32观察到前滑动门28的下方附近或者前轮12的下方附近。虽然在第一左前侧窗32的下方处设置有第二左前侧窗34,但第二左前侧窗34较小,并不一定能够充分地扩展操作员的视野。但是,在自动驾驶车辆10中,通过具有传感器灯单元100,从而能够取得传感器灯单元100的周围的详细的图像信息。尤其是,摄像机140所拍摄到的数据会被显示在显示器64的电子镜上,从而操作员在落座于操作员座52上的状态下就能够详细地掌握车外的状况。而且,在于电子镜的图像上感觉到问题的情况下,操作员也能够从操作员座52上站起来并从第一左前侧窗32或者第二左前侧窗34观察外边的情况。
[0066]
如图5以及图6所示那样,在传感器灯单元100中,摄像机140的透镜140a以与正侧面相比稍朝向后方的方式被安装。在图5以及图6的示例中,在从传感器灯单元100的外壳102的圆筒中心观察时,透镜140a与正侧面相比而朝向后方仅20度至30度左右。其理由之一是因为,在自动驾驶车辆10的前壁18上安装有省略了图示的摄像机。由于自动驾驶车辆10的图像是由该摄像机获得的,因此传感器灯单元100的摄像机140也可以不必拍摄车辆前方。另一个理由是因为,要使摄像机140能够充分地拍摄上下车口26附近。通过将透镜140a设为与正侧面相比稍稍朝向后方,从而能够使上下车口26靠近摄像机140的视场的中央侧,进而精度良好地进行拍摄。
[0067]
传感器灯单元100被设定为,由摄像机140所实施的拍摄、以及由激光雷达138所实施的检测不太会被前滑动门28妨碍。如图6所示那样,前滑动门28(以及后滑动门30)与侧壁20的一般面相比而向外侧突出。但是,传感器灯单元100与前滑动门28相比而具有厚度,从而传感器灯单元100的外端达到了与前滑动门28的外表面相比靠外侧处。在图7所示的示例中,传感器灯单元100与前滑动门28相比而厚两倍以上。因此,即使在前滑动门28打开、且前滑动门28最接近传感器灯单元100的状态下,摄像机140和激光雷达138也能够在水平方向的后方侧确保充分的视野。此外,不论前滑动门28以及后滑动门30的开闭状态如何,摄像机140均能够对前滑动门28以及后滑动门30的外表面进行拍摄,从而能够精度良好地实施上下车口26附近的安全确认。
[0068]
如图7所示那样,传感器灯单元100被固定在侧壁20的外表面上。固定例如是通过将传感器灯单元100的外壳102螺栓紧固在侧壁20上而被实施的。侧壁20实际上是通过钢板或者树脂板等以具有厚度的方式而被制作的,并且螺栓或者螺母不会露出于车厢内。
[0069]
外壳102为树脂制,且成为例如在使两个半圆筒体(以穿过中心轴附近的平面而将圆筒切断而得到的半圆筒体)分别树脂成型之后通过熔敷而被接合形成的单一的容器。转向灯136、激光雷达138以及摄像机140被安装在该单一的外壳102上。在外壳102上,朝向外侧而设置有贯穿孔114、116。在贯穿孔114内嵌入有激光雷达138的前端。此外,在贯穿孔116内嵌入有摄像机140的透镜140a。其中,由于贯穿孔116比较小,因此通过实施防水处理,从而就几乎没有雨水等进入的余地。但是,由于贯穿孔114比较大,因此即使实施防水处理,水也有可能从与激光雷达138之间的间隙中进入。因此,在外壳102中,使激光雷达部132的下侧的隔壁112和处于摄像机部134的下侧的下壁108具有排水结构。
[0070]
具体而言,隔壁112的上表面被形成为,在贯穿孔114侧较高且在侧壁20侧较低的倾斜状。而且,在隔壁112的上表面的高度最低的位置处,在隔壁112上设置有排出孔118。由此,从贯穿孔114与激光雷达138之间的间隙侵入的水,将从排出孔118向摄像机部134流下。此外,下壁108的上表面被形成为,在贯穿孔116侧较高且在侧壁20侧较低的形状。而且,在下壁108的上表面最低的位置处,在下壁108上设置有排出孔120。由此,虽然可能性较小,但是也能够使从贯穿孔116与透镜140a之间的间隙进入的水从排出孔120向外部排出。此外,从激光雷达部132穿过排出孔118而流入的水也可从排出孔120向外部被排出。
[0071]
在图7中,为了说明的简洁,而将排出孔118、120设为非常简单的结构。但是,实际上,可考虑到,排出孔120最好是以被风吹动的雨水或被在附近行驶的车辆溅起的雨水不会从下壁108的下侧进入的方式来设置倒流防止机构。作为倒流防止机构的示例,可列举出在与排出孔120的上端相比靠上侧处,设置起到反弹倒流的雨水的作用的板的方式。此外,作为另一倒流防止机构的示例,可列举出在水未从贯穿孔116和透镜140a的间隙进入的情况下,通过管子或管道等而对排出孔118和排出孔120进行连结的方式。如果管子或管道细到某一程度,则反弹的水进入到激光雷达部132的可能性就变得非常小。此外,能够通过穿过管子或管道来防止进入到激光雷达部132中的水流入到摄像机部134的情况。
[0072]
另外,虽然在图7中省略了图示,但在外壳102上,在侧壁20侧设置有贯穿孔,在与侧壁20相对应的位置处也设置有贯穿孔。穿过这些贯穿孔,从而转向灯136、激光雷达138、摄像机140通过电缆而与车内的ecu(electriccontrol unit:中央控制单元)或蓄电池等相连接。该贯穿孔位于外壳102与侧壁20之间,并且通过实施通常的防水处理,从而能够防止雨水进入内部的情况。
[0073]
在以上的说明中,例示了在传感器灯单元100中,除了设置转向灯136之外,作为传感器装置还设置了激光雷达138和摄像机140这两个装置的方式。激光雷达138为,主动型传感器装置的示例。主动型传感器装置为,照射电磁波并对其反射波进行检测,从而取得检测数据的装置。电磁波的波段并未被特别限定。作为激光雷达138以外的主动型传感器装置,可列举出照射毫米波并对反射波进行检测的毫米波雷达。毫米波雷达是指,使用了波长为1mm~10mm(频率为30-300ghz)的毫米波段的电磁波的雷达。在毫米波雷达中,通过对照射出的电磁波被障碍物反射回来的反射波进行检测,从而对直到障碍物为止的距离、方向进行检测。在毫米波雷达中,具备毫米波的发送接收用天线、实施毫米波的信号处理的电路等。毫米波雷达不容易受到雾、雨、雪等的影响,另一方面还具有电磁波的反射率较低的泡沫聚苯乙烯等的检测精度较低的特性。
[0074]
摄像机140为,利用可见光的被动型传感器装置的示例。被动型传感器装置为,在不照射电磁波的条件下,对外部的电磁波进行检测从而取得图像数据的装置。电磁波的波段并未被特别限定。作为摄像机140以外的被动型传感器装置,能够列举出取得红外图像数据的红外摄像机、取得紫外图像数据的紫外摄像机。此外,被动型传感器装置也可以为具备两个摄像部并利用视野角度来取得三维图像数据的立体摄像机。
[0075]
在传感器灯单元100中,除了设置一个主动型传感器装置和一个被动型传感器装置之外,还可以进一步设置相同或者不同的主动型传感器装置或者被动型传感器装置。此外,在传感器灯单元100中,除了设置一个主动型传感器装置和一个被动型传感器装置之外,还可以设置温度传感器、话筒等的其他传感器。
[0076]
在以上的说明中,将前滑动门28设为,在向前滑动并使上下车口26处于打开状态时,前端到达第一左前侧窗32的后端附近并且到达传感器灯单元100的附近。但是,车门的结构能够进行适当变更。例如,前滑动门28在向前方滑动了的情况下,前端既可以与第一左前侧窗32重叠,也可以位于与第一左前侧窗32的后端相比靠后方处。此外,前滑动门28也可以与后滑动门30不成一对,而是被构成作为单一的滑动门。此外,例如,能够采用如下的滑动门,即,设置在向前滑动了的情况下将上下车口26设为关闭状态、在向后滑动了的情况下将上下车口26设为打开状态的滑动门以及上下车口,并且在向前滑动了的情况下位于传感器灯单元100的附近的滑动门。也能够不采用滑动式,而采用折叠式的车门。
[0077]
此外,在以上的说明中,将传感器灯单元100设为被设置在自动驾驶车辆10的前部的两侧处的单元。但是,也能够将传感器灯单元100设置在其他的部位处。图8为变形方式所涉及的自动驾驶车辆200的立体图。图8与图2相对应,并且对于相同或相对应的结构标记相同的符号。在图8所示的自动驾驶车辆200中,与图2所示的自动驾驶车辆10不同,未在车辆前部设置传感器灯单元100。在自动驾驶车辆200中,设置有与自动驾驶车辆10的第二左后侧窗42相比形状较小、且前端位于后部的第二左后侧窗242。第二左后侧窗242以与第二左前侧窗34前后对称的形状以及尺寸而被制作。而且,在第二左后侧窗242与后滑动门30之间设置传感器灯单元244。在传感器灯单元244中,摄像机以与正侧面相比稍稍朝向前方的方式被配置,以便能够容易地实施后滑动门30的拍摄。同样地,在自动驾驶车辆200中,在右侧的侧壁22上,在后部也设置有传感器灯单元244。
[0078]
在以上的说明中,传感器灯单元100设为具备单一(也就是说,被一体成型、或者通过熔敷、粘合剂等而被一体化从而被形成为难以拆分的外壳)的外壳102。由此,能够提高防水性能等。但是,传感器灯单元100例如也可以由如下方式形成,即,对具备转向灯136的外壳、具备激光雷达138的外壳和具备摄像机140的外壳进行螺栓紧固而形成等的、可拆分的方式。在该情况下,使的转向灯136的维护检修容易化。
[0079]
在以上的说明中,假设了自动驾驶车辆10为公共汽车的情况。但是,自动驾驶车辆10的用途并未被特别限定。例如,自动驾驶车辆10既可以作为可移动的商务空间来利用,也可以作为陈列销售各种商品的零售店、或烹调提供餐饮食品的饮食店等的店铺来使用。此外,作为其他的方式,自动驾驶车辆10也可以作为用于实施事务工作或与顾客之间的洽谈等的办公室来使用。而且,自动驾驶车辆10的利用场景不限于商务,例如,也可以作为个人的移动工具来使用。此外,自动驾驶车辆10的行驶模式或车速也可以被适当变更。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips