
 商标分类
商标分类  商标转让
商标转让 
用于车辆的混合动力系统和包括该混合动力系统的车辆的制作方法
 2021-02-03 15:02:25|
2021-02-03 15:02:25| 306|
306| 起点商标网
起点商标网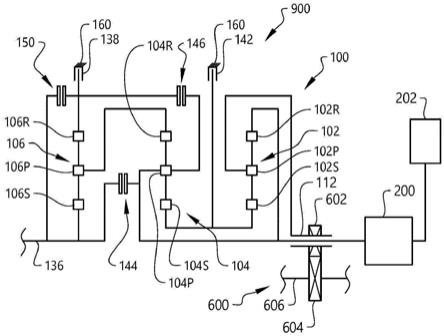
[0001]
本发明涉及一种用于车辆的混合动力系统。本发明还涉及一种包括这种混合动力系统的车辆。本发明适用于车辆,特别是工程机械,例如轮式装载机,但也能够想到其它类型的工程机械。
背景技术:
[0002]
与在建筑工地等处运输沉重负载有关,经常使用工程机械。所述工程机械可以用于与道路或隧道建筑、沙坑、矿山、林业和类似环境有关的运输。因此,工程机械经常在崎岖的地形中和没有常规道路的湿滑地面上在大而重的负载的情况下操作。
[0003]
来自市场的需求是能够以更环保的方式,例如通过工程机械的动力传动系的混合动力化来推进工程机械。这样的动力传动系可以由原动机、齿轮箱和混合动力机械(例如液压机械)组成,该混合动力机械可以单独地使用或者与来自原动机的推进动力结合使用。该混合动力机械连接到齿轮箱,使得从混合动力机械到车轮提供了多个挡位,但是不一定与从原动机到车轮的一样多。对于所使用的特定的混合动力机械,必须优化挡位的数目以及传动比(gear ratios)和速比差(step)。利用优化的齿轮箱,混合动力机械将在其最有效的范围内运行,并且能够在混合动力机械的尺寸有限的情况下,达到轮辋拉力和最高速度的期望组合。
[0004]
齿轮箱包括变速器装置,并且取决于齿轮箱的具体类型,该变速器装置可以包括例如带有彼此啮合连接的圆柱形齿轮的普通齿轮组,或包括相应的太阳轮、齿圈和行星架的行星齿轮组,或具有普通齿轮组和一个或多个行星齿轮组的组合的变速器。这样的变速器装置可以与混合动力机械组合以获得混合动力系统。
[0005]
因此,希望能够使工程机械的操作混合动力化(hybridize),作为来自原动机的传统推进的替代方案。
技术实现要素:
[0006]
本发明的目的是提供一种混合动力系统,其至少部分地克服了现有技术的缺陷。该目的至少部分地通过根据权利要求1所述的混合动力系统来实现。
[0007]
根据本发明的第一方面,提供了一种用于车辆的混合动力系统,该混合动力系统包括混合动力机械和变速器装置,其中,该变速器装置包括变速器壳体、输入轴和输出轴,该变速器装置还包括第一行星齿轮组、第二行星齿轮组和第三行星齿轮组,每个行星齿轮组均包括第一行星构件、第二行星构件和第三行星构件,这些行星构件是太阳轮、行星架和齿圈,变速器装置还包括能够每两个组合地接合以获得六个前进挡位级的五个换挡元件,其中,第一行星齿轮组的齿圈和第二行星齿轮组的行星架以可操作方式彼此连接,第二行星齿轮组的齿圈和第三行星齿轮组的行星架以可操作方式彼此连接,第三行星齿轮组的两个行星构件能够通过换挡元件中的单个换挡元件选择性地彼此连接,并且其中,该混合动力机械和第一行星齿轮组的齿圈彼此连接。
[0008]
在下文和整个说明书中,措词“以可操作方式连接到”应被解释为使得其部件彼此固定地连接,即,以可操作方式彼此连接的部件的旋转速度是相同的。因此,在以可操作方式彼此连接的部件之间没有布置连接机构等,因而它们在运行期间不能彼此脱离。因此,第一行星齿轮组的齿圈总是连接到第二行星齿轮组的行星架。
[0009]
此外,在下文和整个说明书中,措词“能够选择性地连接到”应被解释为元件能够在期望的时间点连接到另一个元件。由此,能够通过使元件彼此连接或断开连接来执行变速器装置的换挡。部件能够通过连接机构/锁定机构选择性地彼此连接,并且例如由控制单元等控制。当连接机构/锁定机构位于接合状态时,这些部件被彼此连接。
[0010]
措词“连接到”应被理解为使得混合动力机械直接地(即,以可操作方式)或间接地连接到第一行星齿轮组的齿圈。该混合动力机械可以经由例如可以是普通齿轮组或行星齿轮组的离合器或挡位级(gear stage)间接地连接到第一行星齿轮组的齿圈。
[0011]
此外,混合动力机械应被理解为能够独自地或者与原动机(例如内燃发动机)组合地推进工程机械的机械。该混合动力机械还可以与能量存储设备一起布置,以在运行期间累积和存储能量。该混合动力机械可以优选是液压机械。因此,这样的液压机械可以布置成在推进工程机械时作为液压马达运行,并且在这样做的驱动条件有利时,作为用于能量再生的液压泵运行。如下面将进一步描述的,液压机械可以布置成与液压蓄能器形式的能量存储设备流体连通。然而,该混合动力机械可以替代地是电机。这样的电机可以布置成在推进工程机械时作为电动马达运行,并且在这样做的驱动条件有利时被布置为连接到例如电池以积蓄电能的发电机。
[0012]
优点在于,车辆可以用混合动力系统操作,因而以更环保的方式被推进。本公开的发明人已经认识到,特定的变速器装置能够有利地与混合动力机械结合使用以形成环保的混合动力系统。通过将混合动力机械连接到第一行星齿轮组的齿圈,能够获得与输出轴的各种传动比,这能够对工程机械的各种负载循环是有利的,并且防止混合动力机械在高车速下超速。另一个优点是,利用混合动力系统,行驶方向的反向将更加平稳,并且制动器的磨损也更少。
[0013]
根据示例性实施例,所述混合动力系统还可以包括另外的变速器装置,该另外的变速器装置以可操作方式连接到变速器装置的输出轴。
[0014]
根据示例性实施例,所述另外的变速器装置可以包括第一齿轮和第二齿轮,该第一齿轮以可操作方式连接到输出轴,该第二齿轮被布置成与第一齿轮啮合连接,以用于将扭矩从变速器装置引导到与输出轴相比在竖直方向上更低的位置。
[0015]
优点在于,能够获得齿轮箱的输入轴和输出轴之间的高度差,这使得齿轮箱适合于例如轮式装载机。
[0016]
根据示例性实施例,所述输出轴可以以可操作方式连接到第一行星齿轮组的行星架。
[0017]
根据示例性实施例,所述输入轴可以连接到第三行星齿轮组的太阳轮。
[0018]
措词“连接到”应被理解为使得输入轴直接地(即,以可操作方式)连接或间接地连接到第三行星齿轮组的太阳轮。输入轴可以经由例如离合器,经由挡位级,或者如以下将描述的,经由第四行星齿轮组间接地连接到第三行星齿轮组的太阳轮。
[0019]
根据示例实施例,所述变速器装置还可以包括第四行星齿轮组,该第四行星齿轮
组包括太阳轮、行星架和齿圈,该第四行星齿轮组以可操作方式连接在输入轴与第三行星齿轮组的太阳轮之间。
[0020]
所述第四行星齿轮组由与变速器装置的第一行星齿轮组、第二行星齿轮组和第三行星齿轮组类似的结构形成。该行星齿轮组可以优选以共轴方式布置。因此,能够相对简单地实现第四行星齿轮组和第三行星齿轮组之间的互连。
[0021]
根据示例实施例,所述输入轴可以以可操作方式连接到第四行星齿轮组的太阳轮。
[0022]
根据示例实施例,所述输入轴能够选择性地连接到第四行星齿轮组的行星架。
[0023]
根据示例实施例,所述第四行星齿轮组的齿圈能够选择性地连接到变速器壳体。
[0024]
根据示例实施例,所述第四行星齿轮组的行星架可以以可操作方式连接到第三行星齿轮组的太阳轮。
[0025]
由此,尤其是在第四行星齿轮组中的双行星齿轮的情况下,可以从第四行星齿轮组获得前进挡/倒挡功能。
[0026]
根据示例实施例,所述第三行星齿轮组的太阳轮和齿圈能够选择性地彼此连接。由此,动力能够经由第三行星齿轮组的行星架从输入轴传递到第二行星齿轮组的齿圈,而不在第三行星齿轮组中再循环。
[0027]
根据示例实施例,所述第三行星齿轮组的太阳轮和行星架能够选择性地彼此连接。由此,动力能够通过绕过第三行星齿轮组而经由第三行星齿轮组的行星架从输入轴传递到第二行星齿轮组的齿圈。
[0028]
根据示例实施例,所述五个换挡元件可以包括两个锁定机构和三个连接机构。
[0029]
锁定机构应被理解为例如将所述行星齿轮组中的一个行星齿轮组的行星构件锁定到变速器壳体的换挡元件。因此,当锁定机构位于接合状态中时,与其连接的行星构件保持静止。另一方面,连接机构应被理解为例如将两个行星构件彼此连接或者将行星构件连接到变速器装置的输入轴或输出轴的换挡元件。由此,当连接机构位于接合状态时,连接机构的相应侧上的构件以相同的旋转速度旋转。锁定机构和连接机构还可以位于滑移状态,从而在与其连接的构件之间获得相对旋转速度。
[0030]
根据示例实施例,所述第一行星齿轮组的太阳轮和第二行星齿轮组的太阳轮可以以可操作方式彼此连接。
[0031]
根据示例实施例,所述第一行星齿轮组的太阳轮和变速器壳体能够选择性地彼此连接。
[0032]
根据示例实施例,所述第二行星齿轮组的太阳轮和变速器壳体能够选择性地彼此连接。
[0033]
根据示例实施例,所述第二行星齿轮组的行星架和第三行星齿轮组的齿圈能够选择性地彼此连接。
[0034]
根据示例实施例,所述第三行星齿轮组的齿圈和变速器壳体能够选择性地彼此连接。
[0035]
根据示例实施例,所述第三行星齿轮组的太阳轮和第二行星齿轮组的行星架能够选择性地彼此连接。
[0036]
根据示例实施例,所述混合动力机械可以以可操作方式连接到能量存储设备。由
此,混合动力机械经由变速器装置供应动力以推进工程机械。该混合动力机械还可以布置成当车辆以功率再生模式运行时(例如当下坡行驶等时),将能量再生到能量存储设备。
[0037]
根据示例实施例,所述混合动力机械可以是液压机械和电机中的一种。该液压机械可以例如是可变排量机械。该液压机械应当优选能够在向前和向后的驱动方向上运行,即,能够或者通过使用偏心液压机械或者通过使用例如合适的阀装置来在两个流动方向上供应或接收液压流体的流。
[0038]
根据本发明的第二方面,提供了一种包括原动机和连接到该原动机的动力传动系的车辆,其中,该动力传动系包括根据上文关于第一方面描述的示例实施例中的任一个实施例的混合动力系统。
[0039]
第二方面的效果和特征在很大程度上类似于上文关于第一方面描述的那些效果和特征。
[0040]
当研究所附权利要求书和以下描述时,本发明的进一步的特征和优点将变得明显。本领域技术人员应认识到,在不脱离本发明的范围的情况下,本发明的不同特征可以组合,以产生除了以下描述的那些实施例之外的实施例。
[0041]
定义
[0042]
根据以下等式定义了行星齿轮组中的不同构件的旋转速度之间的关系:
[0043][0044]
其中
[0045]
ω
s
是太阳轮的旋转速度;
[0046]
ω
p
是行星架的旋转速度;
[0047]
ω
r
是齿圈的旋转速度;并且
[0048]
r是行星齿轮组的静态传动比。
[0049]
如本文所使用的,用于行星齿轮组的表述“静态传动比”r被定义为在行星架静止的情况下、太阳轮的旋转速度与齿圈的旋转速度的比率,即:
[0050]
用于单行星齿轮(等式2)
[0051]
和
[0052]
用于双行星齿轮(等式3)
[0053]
其中
[0054]
z
r
是齿圈的齿数;并且
[0055]
z
s
是太阳轮的齿数。
[0056]
以类似的方式,用于变速器的表述“传动比”应被理解为涉及变速器的输入轴的转数除以变速器的输出轴的转数。此外,表述“速比差(step)”应被理解为是指当变速器的一个档位的传动比除以相邻档位的传动比时获得的商。
附图说明
[0057]
通过以下对本发明示例性实施例的示意性而非限制性的详细描述,将更好地理解
本发明的上述以及另外的目的、特征和优点,其中:
[0058]
图1是示出了轮式装载机形式的工程机械的侧视图;
[0059]
图2示意性地示出了根据本发明的一个示例实施例的混合动力系统;并且
[0060]
图3示意性地示出了根据本发明的另一个示例实施例的混合动力系统。
具体实施方式
[0061]
现在将在下文中参考附图更全面地描述本发明,在附图中示出了本发明的示例性实施例。然而,本发明可以以很多不同的形式来实施,且不应被解释为限于在本文阐述的实施例;而是,提供这些实施例是为了充分性和完整性。在整个说明书中,相同的附图标记表示相同的元件。
[0062]
图1是示出了装载机车辆1形式的工程机械的示例实施例的侧视图,该装载机车辆具有用于装载操作的器具2。图1中描绘的装载机车辆1具有铰接式轮式装载机的形式。术语“器具”旨在包括布置在装载机车辆1上的任何种类的液压操作工具,例如铲斗、叉子或抓持工具。图1中所示的器具2包括铲斗3,该铲斗3被布置在用于提升和降低铲斗3的装载单元组件4上。铲斗3也能够相对于装载单元组件4倾斜或枢转。该装载机车辆1设置有液压系统,该液压系统包括至少一个液压机械(未示出),例如液压泵。该装载机车辆1还包括液压提升缸5和液压倾斜缸6,该液压提升缸5用于装载单元组件4的提升操作,该液压倾斜缸6用于使铲斗3相对于装载单元组件4倾斜。此外,液压系统包括转向缸7a、7b,所述转向缸7a、7b用于通过前部单元8和后部单元9围绕铰接接头装置12的大致竖直的几何轴线10的相对移动来使装载机车辆1转动。前部单元8和后部单元9包括相应的一对地面接合构件20、22。在示例性实施例中,所述地面接合构件20、22是相应的一对车轮。换言之,装载机车辆1通过转向缸7a、7b进行框架转向(frame-steered)。
[0063]
现在转到图2,其示意性地示出了根据示例实施例的适合于上述装载机车辆1的混合动力系统100。该混合动力系统100包括变速器装置900,如下文将进一步描述的,该变速器装置900被布置成获得前进挡位。该变速器装置900包括:第一行星齿轮组102,其包括太阳轮102s、行星架102p和齿圈102r;第二行星齿轮组104,其包括太阳轮104s、行星架104p和齿圈104r;以及第三行星齿轮组106,其包括太阳轮106s、行星架106p和齿圈106r。变速器装置900还包括输入轴136和输出轴112,该输入轴136用于从装载机车辆1的原动机(未示出)接收旋转运动/扭矩,该输出轴112用于向装载机车辆1的驱动轮提供旋转运动/扭矩。输出轴112进而以可操作的方式连接到另外的变速器装置600。
[0064]
该另外的变速器装置600(也可以被称为低输出轴变速器(drop box))包括第一齿轮602和第二齿轮604,所述第一齿轮602和第二齿轮604被布置成彼此啮合连接。第二齿轮604布置在传动轴606上。该传动轴606可以直接或间接地连接到工程机械的车轮。通过低输出轴变速器,来自变速器装置900的扭矩能够被引导到在竖直方向上更低的位置。尽管图2仅示出了一对齿轮,但该另外的变速器装置600可以包括被布置成彼此啮合连接的多个齿轮。
[0065]
混合动力系统100还包括混合动力机械200。该混合动力机械200优选是液压机械200,其能够被布置成作为用于推进工程机械的液压马达或作为用于产生液压动力的液压泵工作。混合动力机械200以可操作方式连接到第一行星齿轮组102的齿圈102r和第二行星
齿轮组104的行星架104p。由此,该混合动力机械能够向变速器装置900并且进一步向变速器装置的输出轴112提供推进动力。
[0066]
根据图2中描绘的示例实施例,该混合动力系统100包括连接到混合动力机械200的能量存储设备202。取决于行驶状况,该能量存储设备202被布置成从混合动力机械200接收动力或者向混合动力机械200供应动力。如果该混合动力机械是液压机械,则能量存储设备202优选是液压蓄能器。
[0067]
变速器装置900的行星齿轮组102、104、106的不同构件(即,太阳轮、行星架和齿圈)在图2中描绘的示例实施例中是根据以下方式构造的。应当容易理解,以下描述的不同构件彼此连接,或者直接地连接,即,以可操作方式连接,或者经由连接机构连接,即,可选择性地连接。这些构件能够通过例如连接器元件以可操作方式彼此连接。这样的连接器元件能够是例如实心轴、空心轴或滚筒,或用于将两个构件彼此连接的其它合适的元件,这些元件是本领域技术人员已知的。因此,以下未给出关于将构件彼此连接的装置的明确说明。
[0068]
第一行星齿轮组102的行星架102p以可操作方式连接到变速器装置900的输出轴112,即,行星架102p总是直接连接到变速器装置900的输出轴112。此外,第一行星齿轮组102的齿圈102r以可操作方式连接到第二行星齿轮组104的行星架104p。通过第二连接机构144,第一行星齿轮组102的齿圈102r还能够选择性地连接到第三行星齿轮组106的太阳轮106s以及变速器装置900的输入轴136。第一行星齿轮组102的太阳轮102s以可操作方式连接到第二行星齿轮组104的太阳轮104s。此外,通过第一锁定机构142,第一行星齿轮组102的太阳轮102s和第二行星齿轮组104的太阳轮104s能够选择性地连接到变速器装置900的变速器壳体160。因此,当被接合时,第一锁定机构142首先降低相应的太阳轮102s、104s的旋转速度,然后将相应的太阳轮102s、104s锁定到变速器壳体160。
[0069]
第二行星齿轮组104的齿圈104r以可操作方式连接到第三行星齿轮组106的行星架106p。此外,通过第一连接机构146,第二行星齿轮组104的行星架104p也能够选择性地连接到第三行星齿轮组106的齿圈106r。
[0070]
第三行星齿轮组106的太阳轮106s以可操作方式连接到输入轴136。通过第二锁定机构138,第三行星齿轮组106的齿圈106r能够选择性地连接到变速器壳体160。因此,当被接合时,第二锁定机构138首先降低齿圈106r的旋转速度,然后将齿圈106r锁定到变速器壳体160。此外,通过第三连接机构150,输入轴136能够选择性地连接到第三行星齿轮组106的齿圈106r。因此,通过第三连接机构150,第三行星齿轮组106的太阳轮106s和齿圈106r能够选择性地彼此连接。
[0071]
应当容易理解,第三连接机构150也可以同样位于第三行星齿轮组106的太阳轮106s和行星架106p之间,以及在第三行星齿轮组106的行星架106p和齿圈106r之间。这对于以下关于图3描述的实施例也是有效的。
[0072]
根据图2中描绘的示例,变速器装置900适于采用如下表1中给出的挡位。在下表1中,以及对于本公开的其余表格,锁定机构被简单地表示为“制动器”,而连接机构被简单地表示为“离合器”。标有点的单元格表示接合状态,并且空白单元格表示脱离状态。该表还指示了针对各种挡位能够由变速器装置900获得的传动比和速比差的非限制性示例。根据对于以下所有表均有效的非限制性示例,第一行星齿轮组102的静态传动比可以是-2.871,第二行星齿轮组104的静态传动比可以是-1.754,并且第三行星齿轮组106的静态传动比可以
是-1.737。
[0073]
表1
–
用于图2中的实施例的不同前进挡位的换挡图表。
[0074][0075]
如表1中能够看到的,图2中的变速器装置900包括六个前进挡位f1至f6,其中所述六个挡位中的每一个挡位都是通过将换挡元件中的两个定位在接合状态而获得的。挡位的切换能够优选通过单步换挡或通过两步换挡来执行。单步换挡应被理解为意味着从一个挡位到下一个即将到来的后续挡位,例如,从第一挡位到第二挡位、从第二挡位到第三挡位、从第三挡位到第二挡位等的换挡。两步换挡应被理解为意味着执行换挡以排除下一个即将到来的后续挡位,例如,从第一挡位到第三挡位、从第二挡位到第四挡位、从第三挡位到第一挡位等的换挡。
[0076]
如表1中能够看到的,单步换挡仅包括连接机构和锁定机构的单个转换,即,当执行单步换挡时,仅连接机构/锁定机构中的一个机构从接合状态转换到脱离状态,并且仅连接机构/锁定机构中的一个机构从脱离状态转换到接合状态。作为示例,当从第一挡位转换到第二挡位时,仅第二锁定机构138从接合状态改变到脱离状态,并且仅第一连接机构146从脱离状态改变到接合状态。同样,两步换挡也仅包括连接机构和锁定机构的单个转换。
[0077]
因此,该变速器装置的优点在于,由于在换挡期间需要激活/停用少量的连接机构/锁定机构,因此提高了换挡能力。详细地,在单步换挡以及两步换挡期间,仅发生单个转换。
[0078]
此外,混合动力机械200在图2中以可操作方式连接到第一行星齿轮组102的齿圈102r和第二行星齿轮组104的行星架104p。由此,如以下示例性的表2中所示,针对混合动力机械200能够获得三个与输出轴112的不同的传动比。对于挡位f1至f4,第一锁定机构142被接合,并且第一行星齿轮组102的太阳轮102s保持静止。因此,对于挡位f1至f4,混合动力机械200相对于输出轴112将具有固定的传动比。对于挡位f4至f6,第二连接机构144被接合,并且混合动力机械200直接连接到输入轴136和原动机。因此,对于挡位f4至f6,混合动力机
械200将具有与原动机相同的、相对于输出轴112的传动比。因此,降低了混合动力机械200的旋转速度超速的风险。
[0079]
表2-用于图2中的实施例的不同前进挡位的换挡图表。
[0080][0081]
如上所述,变速器装置900采取前进挡位。因此,参考图3描述第四行星齿轮组108,该第四行星齿轮组108以可操作方式连接在输入轴136和第三行星齿轮组106之间,从而还获得倒挡挡位。该第四行星齿轮组108包括太阳轮108s、行星架108p和齿圈108r。如对于其它行星架102p、104p和106p(未示出)那样,行星架108p支撑多个行星齿轮。这里,优选使用一组双行星齿轮,从而使第四行星齿轮组108的静态传动比为正。变速器装置900还包括第三锁定机构140形式的另一换挡元件140、以及第四连接机构148形式的另外的换挡元件148。
[0082]
如图3中能够看到的,第四行星齿轮组108的太阳轮108s以可操作方式连接到输入轴136。通过第四连接机构148,行星架108p能够选择性地连接到输入轴136。第四行星齿轮组108的行星架108p也以可操作方式连接到第三行星齿轮组106的太阳轮106s。最后,通过第三锁定机构140,第四行星齿轮组108的齿圈108r能够选择性地连接到变速器壳体160。因此,当被接合时,第三锁定机构140首先降低齿圈108r的旋转速度,然后将齿圈108r锁定到变速器壳体160。
[0083]
图3中的混合动力系统100适于采取如下表3和表4中所示的挡位。在表3和表4中给出的比率和速比差应被视为非限制性示例。
[0084]
表3-用于图3中的实施例的不同前进挡位的换挡图表。
[0085][0086]
表4-用于图3中的实施例的不同倒挡挡位的换挡图表。
[0087][0088]
如表3和4中能够看到的,图3中描绘的变速器装置900采用六个前进挡位f1至f6和六个倒挡挡位r1至r6。根据表3中描绘的非限制性示例,用于前进挡位f1至f6的比率和速比差与上表1中描绘的比率和速比差类似。这是由于以下事实:对于所述前进挡位中的每一个前进挡位,第三锁定机构140位于脱离状态,并且第四连接机构148位于接合状态,从而导致在第四行星齿轮组108上的传动比为1:1。
[0089]
此外,对于所述倒挡挡位r1至r6中的每一个倒挡挡位,第三锁定机构140位于接合
状态,并且第四连接机构148位于脱离状态。因此,第四行星齿轮组108被布置为实现倒挡挡位r1至r6。作为非限制性示例,用于第四行星齿轮组108的静态传动比可以被选择为+2,从而导致第四行星齿轮组108上的传动比为1:-1。用于倒挡挡位r1至r6的比率的绝对值然后将与用于前进挡位f1至f6的比率的绝对值相同。
[0090]
关于单步换挡和两步换挡,针对图2和表1的描述所给出的相同论点对于在图3与表3和表4中描绘的实施例也是有效的。此外,以上针对图2的描述给出的混合动力机械200的描述对于在图3中描绘的实施例也是有效的。
[0091]
应当理解,本发明不限于上文所述并在附图中示出的实施例;而是,本领域技术人员将认识到,可以在所附权利要求书的范围内进行许多修改和变型。例如,尽管已经主要针对轮式装载机描述了本发明,但应该理解,本发明同样适用于任何类型的车辆。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips