
 商标分类
商标分类  商标转让
商标转让 
一种基于分层架构的电动汽车有序充电控制方法与流程
 2021-02-03 15:02:48|
2021-02-03 15:02:48| 358|
358| 起点商标网
起点商标网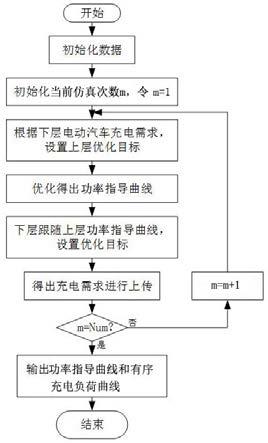
[0001]
本发明属于电动汽车充电技术领域,具体涉及一种基于分层架构的电动汽车有序充电控制方法。
背景技术:
[0002]
伴随着全球工业化进程的迅猛发展,石油等不可再生资源的消耗呈现出逐渐增加的趋势,使得能源资源面临着严重的短缺问题;另一方面,二氧化碳等的排放问题使得自然环境也面临着严重的考验,极端恶劣天气的频繁出现使人们越来越重视环境保护。为了缓解自然资源不足以及环境污染等问题,电动汽车近年来得到了人们的青睐。但是在未来大规模电动汽车进行无序充电,必然会对电网的稳定安全运行造成巨大的影响,无序的电动汽车充电负荷会给配电网带来电压下降、线路过载、电网负荷峰值增大、网络损耗等一系列问题。因此,有必要对电动汽车的有序充电策略进行研究,对电动汽车充放电进行引导和控制,使得电网、用户和电动汽车公司都能获得最大的效益。
[0003]
目前,大量学者对电动汽车有序充电控制策略开展了相关研究工作,取得的成果显著。有的以平抑负荷波动和最小化负荷峰谷差为目标,将充电站各个时段的充电功率作为优化对象,采用粒子群算法建立了充电站多目标优化模型;有的以充换电站为研究对象,针对负荷峰谷差增加和充电费用较高的问题,以充电站的全天花费最低为优化目标,以起始充电时间为优化对象,建立了分时电价情况下充换电站经济运行模型;有的将通常采用的集中优化问题进行分解为多个子问题进行求解优化,以最大化充电站的收益为优化目标,在分时电价和固定电价策略下,分别采用集中式以及分散式优化策略进行仿真,得到电动汽车无序和有序充电情况下的负荷预测结果。
技术实现要素:
[0004]
针对无序充电给电网带来极大负荷并导致线路过载、网络损耗的问题,本发明提出了一种基于分层架构的电动汽车有序充电控制方法,考虑了充电站的容量限制,建立了电动汽车双层优化控制模型,并以降低用电成本、满足用户充电时间需求、降低负荷方差、削峰填谷为目标,实现了电动汽车的有序充电控制,使电动汽车充电负荷的高峰期后移,由晚上的用电高峰期转移到了第二天凌晨的用电低谷期。
[0005]
为解决以上技术问题,本发明所采用的技术方案如下:
[0006]
一种基于分层架构的电动汽车有序充电控制方法,包括如下步骤:
[0007]
s1,利用蒙特卡洛方法建立影响电动汽车充电负荷因素的概率模型;
[0008]
s2,根据步骤s1所得到的概率模型计算电动汽车有序充电下的总负荷;
[0009]
s3,建立基于分层架构的有序充电控制模型,所述有序充电控制模型包括相连接的上层充电控制中心和下层台区充电站,上层充电控制中心根据步骤s2所得到的有序充电下的总负荷,利用粒子群算法对电动汽车的充电过程进行优化得到功率指导曲线,下层台区充电站根据功率指导曲线利用粒子群算法求解电动汽车的最优充电时段,并根据最优充
电时段计算有序充电负荷需求;
[0010]
s4,根据步骤s3所得到的有序充电负荷需求和对应的基础负荷计算有序充电负荷曲线,输出电动汽车的功率指导曲线和有序充电负荷曲线。
[0011]
在步骤s1中,所述概率模型包括起始荷电状态概率模型、起始充电时刻概率模型以及充电时长概率模型。
[0012]
所述起始荷电状态概率模型为:
[0013][0014]
式中,i
soc
表示电动汽车的起始荷电状态,f(i
soc
)表示电动汽车起始荷电状态i
soc
的概率函数,μ
1
表示电动汽车起始荷电状态i
soc
的均值,σ
1
表示电动汽车起始荷电状态i
soc
的标准差;
[0015]
所述起始充电时刻概率模型为:
[0016][0017]
式中,t表示电动汽车的起始充电时刻,f(t)表示起始充电时刻t的概率函数,μ
2
表示起始充电时刻t的均值,σ
2
表示起始充电时刻t的标准差;
[0018]
所述充电时长概率模型为:
[0019][0020]
式中,t
c
表示电动汽车的充电时长,e
soc
表示电动汽车期望的充电目标荷电状态;e表示电动汽车的电池容量,p
c
表示电动汽车的充电功率,η表示充电效率。
[0021]
在步骤s2中,所述计算电动汽车有序充电下的总负荷,包括如下步骤:
[0022]
s2.1,初始化有序充电下电动汽车的基本参数;
[0023]
s2.2,利用蒙特卡洛方法根据步骤s1所得到的起始荷电状态概率模型和起始充电时刻概率模型对所有电动汽车的起始荷电状态和每辆电动汽车的起始充电时刻进行初始化;
[0024]
s2.3,设定电动汽车期望的充电目标荷电状态为1,根据步骤s2.2所得到的电动汽车的起始荷电状态和步骤s1所得到的充电时长概率模型计算每辆电动汽车的充电时长;
[0025]
s2.4,将一天划分为l个时段,根据每辆电动汽车的起始充电时刻和充电时长统计每个时段下进行充电的电动汽车数量;
[0026]
s2.5,根据步骤s2.4所得到的每个时段下进行充电的电动汽车数量和对应时段的基础负荷计算有序充电下一天中每个时段的总负荷。
[0027]
在步骤s2.5中,所述有序充电下一天中每个时段的总负荷的计算公式为:
[0028]
ph
m,j
=p
c
*a(j)+p
b,j
;
[0029]
式中,ph
m,j
表示有序充电下一天中第j个时段下的总负荷,a(j)表示一天中第j个时段下进行充电的电动汽车数量,p
b,j
表示一天中第j个时段下的基础负荷。
[0030]
在步骤s3中,所述上层充电控制中心根据步骤s2所得到的有序充电下的总负荷,利用粒子群算法对电动汽车的充电过程进行优化得到功率指导曲线,下层台区充电站根据
功率指导曲线利用粒子群算法求解电动汽车的最优充电时段,并根据最优充电时段计算有序充电负荷需求,包括如下步骤:
[0031]
s3.1,设置最大仿真次数num,并初始化当前仿真次数m。
[0032]
s3.2,上层充电控制中心根据有序充电下一天中每个时段的总负荷,通过设置目标为总负荷方差最小的目标函数和不超过下层台区充电站的最大功率限值的约束条件,采用粒子群算法对电动汽车的充电过程进行优化获得功率指导曲线;
[0033]
s3.3,下层台区充电站根据步骤s3.2所得到的功率指导曲线和负荷峰谷差最小两个因素设置优化目标函数,设置不超过下层台区充电站的最大功率限值、充电时段符合实际情况以及电池状态连续性的约束条件,利用粒子群算法通过改变电动汽车的充电时段求解电动汽车的最优充电时段;
[0034]
s3.4,下层台区充电站根据步骤s3.3得到的电动汽车的最优充电时段计算一天中各个时段的电动汽车充电数量,根据电动汽车充电数量计算电动汽车一天中各个时段的充电负荷需求;
[0035]
s3.5,将当前仿真次数m与最大仿真次数num进行比较,若m<num,令m=m+1,根据步骤s3.4所得到的一天中各个时段的充电负荷需求分别对应更新有序充电下一天中每个时段的总负荷,并返回步骤s3.2,否则,执行步骤s4。
[0036]
所述总负荷方差最小的目标函数为:
[0037][0038]
式中,f
1
表示总负荷方差最小的目标函数,p
b,j
表示一天中第j个时段下电动汽车的基础负荷,p
s,j
表示上层充电控制中心下发的功率指导曲线中对应于第j个时段的指导负荷,表示一天中第j个时段下的预期总负荷均值;
[0039]
所述一天中第j个时段下的预期总负荷均值所对应的公式为:
[0040][0041]
所述不超过下层台区充电站的最大功率限值的约束条件为:
[0042]
p(j)≤p
max
,j∈(1,2,...,l);
[0043]
式中,p(j)表示一天中第j个时段下的总功率,p
max
表示下层台区充电站的最大功率限值。
[0044]
所述优化目标函数为:
[0045]
f
2
=λ
1
min(p
ev,j
)+λ
2
ρ(p
s,j
,p
ev,j
);
[0046]
式中,f
2
表示优化目标函数,p
ev,j
表示电动汽车一天中第j个时段下的充电负荷需求,ρ表示相关系数,λ
1
和λ
2
均表示权重系数,p
s,j
表示上层充电控制中心下发的功率指导曲线中对应于第j个时段的指导负荷;
[0047]
所述不超过下层台区充电站的最大功率限值、充电时段符合实际情况以及电池状态连续性的约束条件分别为:
[0048]
①
不超过下层台区充电站的最大功率限值:
[0049]
p(j)≤p
max
,j∈(1,2,...,l);
[0050]
②
充电时段符合实际情况约束:
[0051]
t
in,i
≤t
on,i
≤t≤min{t
out,i
,t
on,i
+t
c
};
[0052]
式中:t
in,i
和t
out,i
分别表示第i辆电动汽车的接入和离开下层台区充电站的时间;t
on,i
表示第i辆电动汽车开始充电的时间;t
c
为充电时长。
[0053]
③
电池状态连续性约束:
[0054][0055]
式中:s
j+1
表示第j+1个时段下电动汽车的荷电状态,s
j
表示第j个时段下电动汽车的荷电状态,t
c,j
表示第j个时段下电动汽车的充电时长,η表示充电效率,e表示电动汽车的电池容量,p
c
表示电动汽车的充电功率。
[0056]
本发明的有益效果:本发明对影响电动汽车充电负荷的因素建立了对应的概率模型,并建立了双层的有序充电控制模型,通过采用粒子群算法对有序充电控制模型进行优化,从而使电动汽车充电负荷的高峰期后移,避开了基础用电负荷的高峰期,与无序充电相比,验证出了本发明在降低电动汽车充电负荷对电网的冲击、平稳总负荷曲线和降低用户花费方面起到促进作用。
附图说明
[0057]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0058]
图1为本发明基于分层架构的电动汽车有序充电控制策略的流程图。
[0059]
图2为无序充电下和有序充电下不包含基础负荷的充电负荷示意图。
[0060]
图3为无序充电下和有序充电下包含基础负荷的充电负荷示意图。
[0061]
图4为粒子群算法的每代粒子位置的更新方式图。
[0062]
图5为粒子群算法的流程图。
[0063]
图6为有序充电控制模型的示意图。
具体实施方式
[0064]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0065]
为了便于理解本申请,现对本申请所用到的方法进行解释:
[0066]
蒙特卡洛方法(monte carlo method),是一种以概率统计理论为指导的统计模拟方法。其基本思想是根据实际问题的随机特性,对相关因素建立概率模型,通过变量的概率分布产生大量的随机数序列,从而得到一系列的实验样本,将模拟得到的结果作为实际的近似解,试验次数越多,得到的解越精确。
[0067]
粒子群算法(particle swarm optimization,pso)是一种通过模拟鸟群觅食行为
来求解优化问题的方法。由粒子的位置、速度等参数可以得到每个粒子的适应值,通过不断比较个体最优值和全局最优值得到最优结果。
[0068]
如图4所示,x表示粒子的位置,粒子在进行寻找最优解的过程中,其位置会受到粒子的飞行速度、粒子的自我记忆及群体的影响,通过跟踪个体极值以及全局极值这两个极值来不断更新自己。假设目标搜索空间的维度为d,种群的大小为n,其中,第i个粒子的向量维数为d维
[0069]
x
i
=(x
i1
,x
i2
,
…
,x
id
);(1)
[0070]
式中,x
id
表示第i个粒子的位置所对应的第d维坐标,且i=1,2,
…
,n,x
i
表示空间维度为d维的第i个粒子的坐标位置;
[0071]
第i个粒子的飞行速度记为:
[0072]
v
i
=(v
i1
,v
i2
,
…
,v
id
);(2)
[0073]
式中,v
i
表示空间维度为d维的第i个粒子的飞行速度,v
id
表示第i个粒子所对应的第d维飞行速度;
[0074]
第i个粒子的个体极值记为:
[0075]
p
best
=(p
i1
,p
i2
,
…
,p
id
);(3)
[0076]
式中,p
best
表示综合d维空间各函数值得到的第i个粒子的个体极值,p
id
表示第i个粒子在第d维空间的函数值;
[0077]
整个粒子群的全局极值记为:
[0078]
g
best
=(p
g1
,p
g2
,
…
,p
gd
);(4)
[0079]
式中,g
best
表示整个粒子群中个体极值最优的粒子个体极值,也就是全局极值,p
gd
表示整个粒子群有最优个体极值的粒子的第d维的目标函数值;
[0080]
在找到个体极值和全局极值后,粒子依据以下两个公式来更新速度和位置:
[0081]
v
id
=w*v
id
+c
1
r
1
(p
id-x
id
)+c
2
r
2
(p
gd-x
id
);(5)
[0082]
式中,v
id
表示更新后第i个粒子对应的第d维飞行速度,w表示惯性权重,p
id
表示第i个粒子获得个体极值时对应粒子的第d维坐标位置,x
id
表示第i个粒子当前对应第d维坐标位置,p
gd
表示获得全局极值对应粒子的第d维坐标位置,c
1
,c
2
均表示学习因子,r
1
,r
2
均表示0~1内均匀随机数;
[0083]
x
id
=x
id
+v
id
。(6)
[0084]
如图5所示,为粒子群算法的流程图,步骤如下:
[0085]
(1)对种群内所有粒子的位置、速度等参数进行初始化;
[0086]
(2)根据优化问题对每个粒子的适应值fit[i]进行计算;
[0087]
(3)将当前粒子的适应值fit[i]与当前粒子的历史极值p
best
(i)进行比较,若fit[i]>p
best
(i),则用fit[i]替换掉p
best
(i);
[0088]
(4)通过比较当前粒子的适应值fit[i]与当前粒子的全局极值g
best
(i)寻找获取群体全局最优解,若fit[i]>g
best
(i),则用fit[i]替换掉g
best
(i);
[0089]
(5)根据公式(5)和公式(6)更新粒子的速度v
i
和位置x
i
;
[0090]
(6)判断是否满足循环迭代结束条件,若是则退出循环迭代,否则返回步骤(2)。
[0091]
一种基于分层架构的电动汽车有序充电控制方法,包括如下步骤:
[0092]
s1,利用蒙特卡洛方法建立影响电动汽车充电负荷因素的概率模型。
[0093]
由于在影响电动汽车充电负荷的因素中,起始荷电状态、起始充电时刻、充电时长等因素对充电负荷的影响较大,所述概率模型包括起始荷电状态概率模型、起始充电时刻概率模型以及充电时长概率模型。
[0094]
所述起始荷电状态概率模型为:
[0095][0096]
式中,i
soc
表示电动汽车的起始荷电状态,f(i
soc
)表示电动汽车起始荷电状态i
soc
的概率函数,μ
1
表示电动汽车起始荷电状态i
soc
的均值,σ
1
表示电动汽车起始荷电状态i
soc
的标准差;
[0097]
起始荷电状态是电动汽车起始充电时刻电池容量所占电池总容量的百分比,是得到电动汽车充电时长的前提。
[0098]
所述起始充电时刻概率模型为:
[0099][0100]
式中,t表示电动汽车的起始充电时刻,f(t)表示起始充电时刻t的概率函数,μ
2
表示起始充电时刻t的均值,σ
2
表示起始充电时刻t的标准差;
[0101]
起始充电时刻是对电动汽车何时接入电网进行充电的描述,一般用户会选择出行结束时刻作为充电起始时刻,起始充电时刻是得到电动汽车充电时段的前提。
[0102]
所述充电时长概率模型为:
[0103][0104]
式中,t
c
表示电动汽车的充电时长,e
soc
表示电动汽车期望的充电目标荷电状态;e表示电动汽车的电池容量,p
c
表示电动汽车的充电功率,η表示充电效率。
[0105]
充电时长是对满足电动汽车用户需求所需充电时间的描述,是得到电动汽车充电时段的前提。
[0106]
电动汽车的起始充电时刻和起始荷电状态均是由美国家庭出行调查(national household travel survey,nhts)作为数据来源。
[0107]
s2,根据步骤s1所得到的起始荷电状态概率模型计算电动汽车有序充电下的总负荷,包括如下步骤:
[0108]
s2.1,初始化有序充电下电动汽车的基本参数。
[0109]
所述基本参数包括电动汽车数量n、充电功率p
c
、充电效率η和电池容量e;本实施例中,设定电动汽车数量n=200,电池容量e=82kwh,充电功率p
c
=7kw,充电效率η=0.9。
[0110]
s2.2,利用蒙特卡洛方法根据步骤s1所得到的起始荷电状态概率模型和起始充电时刻概率模型对所有电动汽车的起始荷电状态i
soc
和每辆电动汽车的起始充电时刻t进行初始化。
[0111]
所述起始荷电状态i
soc
由满足正态分布n(0.5,0.01)的概率分布函数随机抽取得到,电动汽车的起始充电时刻t由满足正态分布n(17.6,11.56)的概率分布函数随机抽取得到,且满足正态分布n(0.5,0.01)的概率分布函数和满足正态分布n(17.6,11.56)的概率分
布函数分别是由起始荷电状态概率模型和起始充电时刻概率模型所对应的期望和方差得到。
[0112]
s2.3,设定电动汽车期望的充电目标荷电状态e
soc
为1,根据步骤s2.2所得到的电动汽车的起始荷电状态i
soc
、步骤s2.1所初始化的基本参数以及步骤s1所得到的充电时长概率模型计算每辆电动汽车的充电时长t
c
。
[0113]
s2.4,将一天划分为l个时段,根据每辆电动汽车的起始充电时刻t和充电时长t
c
统计每个时段下进行充电的电动汽车数量。
[0114]
s2.5,根据步骤s2.4所得到的每个时段下进行充电的电动汽车数量和对应时段的基础负荷计算有序充电下一天中每个时段的总负荷。
[0115]
所述总负荷的计算公式为:
[0116]
ph
m,j
=p
c
*a(j)+p
b,j
;
[0117]
式中,ph
m,j
表示有序充电下一天中第j个时段下的总负荷,a(j)表示一天中第j个时段下进行充电的电动汽车数量,p
b,j
表示一天中第j个时段下的基础负荷;
[0118]
本实施例中,l=1440,表示将24小时划分为1440个时段,间隔为1min。
[0119]
s3,如图6所示,建立基于分层架构的有序充电控制模型,所述有序充电控制模型包括相连接的上层充电控制中心和下层台区充电站,上层充电控制中心根据步骤s2所得到的有序充电下的总负荷,并利用粒子群算法对电动汽车的充电过程进行优化得到功率指导曲线,下层台区充电站根据功率指导曲线利用粒子群算法求解电动汽车的最优充电时段,并根据最优充电时段计算有序充电负荷需求。
[0120]
所述上层充电控制中心根据步骤s2所得到的有序充电下一天中每个时段的总负荷,利用粒子群算法对电动汽车的充电过程进行优化得到功率指导曲线,下层台区充电站根据功率指导曲线利用粒子群算法求解电动汽车的最优充电时段,并根据最优充电时段计算有序充电负荷需求,包括如下步骤:
[0121]
s3.1,设置最大仿真次数num=4,初始化当前仿真次数m=1。
[0122]
s3.2,上层充电控制中心根据有序充电下一天中每个时段的总负荷,通过设置目标为总负荷方差最小的目标函数和不超过下层台区充电站的最大功率限值的约束条件,采用粒子群算法对电动汽车的充电过程进行优化获得功率指导曲线。
[0123]
所述总负荷方差最小的目标函数为:
[0124][0125]
式中,f
1
表示总负荷方差最小的目标函数,p
b,j
表示一天中第j个时段下电动汽车的基础负荷,p
s,j
表示上层充电控制中心下发的功率指导曲线中对应于第j个时段的指导负荷,表示一天中第j个时段下的预期总负荷均值;
[0126]
所述一天中第j个时段下的预期总负荷均值所对应的公式为:
[0127][0128]
所述不超过下层台区充电站的最大功率限值的约束条件为:
[0129]
p(j)≤p
max
,j∈(1,2,...,l);
[0130]
式中:p(j)表示一天中第j个时段下的总功率,p
max
表示下层台区充电站的功率限值,一般为2400kw。
[0131]
s3.3,下层台区充电站根据步骤s3.2所得到的功率指导曲线和负荷峰谷差最小两个因素设置优化目标函数,设置不超过下层台区充电站的最大功率限值、充电时段符合实际情况以及电池状态连续性的约束条件,利用粒子群算法通过改变电动汽车的充电时段求解电动汽车的最优充电时段。
[0132]
功率指导曲线是下层台区充电站优化目标的重要参考因素之一,为了减少电动汽车充电带来的负荷峰谷差过大引起的冲击,同时要使得下层台区充电站的实际充电负荷尽可能的跟随功率指导曲线,因此要考虑下层台区充电站的负荷峰谷差。
[0133]
所述优化目标函数为:
[0134]
f
2
=λ
1
min(p
ev,j
)+λ
2
ρ(p
s,j
,p
ev,j
);
[0135]
式中,f
2
表示优化目标函数,p
ev,j
表示电动汽车一天中第j个时段下的充电负荷需求,当m=1时,p
ev,j
=ph
m,j
,当m>1时,p
ev,j
根据优化目标函数f2优化得到,ρ表示相关系数,λ
1
和λ
2
均表示权重系数,p
s,j
表示上层充电控制中心下发的功率指导曲线中对应于第j个时段的指导负荷。
[0136]
所述不超过下层台区充电站的最大功率限值、充电时段符合实际情况以及电池状态连续性的约束条件分别为:
[0137]
①
不超过下层台区充电站的最大功率限值:
[0138]
p(j)≤p
max
,j∈(1,2,...,l);
[0139]
②
充电时段符合实际情况约束:
[0140]
t
in,i
≤t
on,i
≤t≤min{t
out,i
,t
on,i
+t
c
};
[0141]
式中,t
in,i
和t
out,i
分别表示第i辆电动汽车的接入和离开下层台区充电站的时间;t
on,i
表示第i辆电动汽车开始充电的时间,t
c
表示充电时长。
[0142]
③
电池状态连续性约束:
[0143][0144]
式中,s
j+1
表示第j+1个时段下电动汽车的荷电状态,s
j
表示第j个时段下电动汽车的荷电状态,t
c,j
表示第j个时段下电动汽车的充电时长,η表示充电效率,e表示电动汽车的电池容量,p
c
表示电动汽车的充电功率。
[0145]
s3.4,下层台区充电站根据步骤s3.3得到的电动汽车的最优充电时段计算一天中各个时段的电动汽车充电数量,根据电动汽车充电数量计算电动汽车一天中各个时段的充电负荷需求。
[0146]
s3.5,将当前仿真次数m与最大仿真次数num进行比较,若m<num,令m=m+1,根据步骤s3.4所得到的各个时段的充电负荷需求分别对应更新有序充电下一天中每个时段的总负荷,返回步骤s3.2,否则,执行步骤s4。
[0147]
通过仿真使得对应的目标函数值比上一次更加优化,当达到最大仿真次数时所得到的充电负荷需求即为最终的充电负荷需求。在有序充电控制模型中,电动汽车分别通过下层台区充电站充电,下层台区充电站接收到电动汽车的充电需求,将充电需求上传到上层充电控制中心,上层充电控制中心下发功率指导曲线给到下层台区充电站充电,下层台
区充电站根据功率指导曲线和优化目标函数得到有序充电负荷曲线。
[0148]
s4,上层充电控制中心根据步骤s3所得到的有序充电负荷需求叠加对应的基础负荷计算有序充电负荷曲线,输出电动汽车的功率指导曲线和有序充电负荷曲线。
[0149]
所述有序充电负荷曲线也可以理解为功率跟随曲线,得到的有序充电负荷曲线与功率指导曲线进行对比,通过比较二者之间的相关性可以验证功率指导曲线是否得到有效执行;将有序充电负荷曲线与无序充电负荷曲线进行对比可以验证该有序充电控制方法在平抑负荷波动、消峰填谷方面的作用。
[0150]
为了验证以上效果,以下根据步骤s1所建立的概率模型,基于蒙特卡洛方法计算无序充电下所有电动汽车一天的充电负荷,如图1所示,包括如下步骤:
[0151]
a,初始化无序充电电动汽车的基本参数和当前仿真数m',并设置无序充电下的最大仿真数m;
[0152]
所述基本参数包括电动汽车数量n、充电功率p
c
、电池容量e、充电效率η和和最大仿真次数m;本实施例设定有序充电的电动汽车数量n=200,最大仿真数m=10,电动汽车的电池容量e=82kwh,电动汽车的充电功率p
c
=7kw,充电效率η=0.9,当前仿真数m'=1。
[0153]
b,利用蒙特卡洛方法根据起始荷电状态概率模型和起始充电时刻概率模型对所有电动汽车的起始荷电状态i
soc
以及每辆电动汽车的起始充电时刻t进行初始化;
[0154]
起始荷电状态i
soc
由满足正态分布n(0.5,0.01)的概率分布函数随机抽取得到,且满足正态分布n(0.5,0.01)的概率分布函数;电动汽车的起始充电时刻t由满足正态分布n(17.6,11.56)的概率分布函数随机抽取得到。
[0155]
c,设定电动汽车期望的充电目标荷电状态e
soc
为1,根据步骤b所得到的电动汽车的起始荷电状态i
soc
和充电时长概率模型计算每辆电动汽车的充电时长t
c
;
[0156]
d,根据步骤b得到的起始充电时刻t和步骤c计算出的充电时长t
c
,统计一天中各个时段下进行充电的电动汽车数量;
[0157]
e,根据步骤d所得到的每个时段下进行充电的电动汽车充电数量和对应时段的基础负荷计算无序充电下所有电动汽车一天中每个时段的总充电负荷;
[0158]
所述总充电负荷的计算公式为:
[0159]
ph'
m',j
=p
c
*a'(j)+p
b,j
;
[0160]
式中,ph'
m',j
表示第m'次仿真时所计算出的无序充电下所有电动汽车一天中第j个时段下的总充电负荷,a'(j)表示一天中第j个时段下进行无序充电的电动汽车数量,p
b,j
表示一天中第j个时段下的基础负荷。
[0161]
f,将当前仿真数m'与最大仿真数m进行比较,若m'<m,令m=m+1,返回步骤b,否则,执行步骤g;
[0162]
g,根据每次仿真所计算出的无序充电下所有电动汽车一天中各个时段的总充电负荷计算对应时段的总充电负荷均值即为电动汽车无序充电下的总负荷;
[0163][0164]
式中,表示无序充电下所有电动汽车在一天中的第j个时段下的总充电负荷均值。
[0165]
为了验证本发明的效果,以某市为例,合理设置电动汽车的基本参数,如表1所示,基于分层架构的电动汽车有序充电控制策略计算得出电动汽车的有序充电负荷曲线等相关仿真结果。
[0166]
表1有序充电算例参数
[0167][0168]
通过仿真计算,得到如图2所示的电动汽车无序和采用有序控制后的充电负荷情况。可以看出如果对充电不加引导控制,电动汽车的充电负荷的高峰期位于晚上17:00-23:00期间,集中在用户一天行驶结束时段,与基础负荷用电高峰期相重合;而采用有序充电情况下,电动汽车的充电负荷峰值后移,转移到第二天凌晨00:00-05:00期间,从而缓解了电动汽车充电负荷在用电高峰期对电网的冲击。
[0169]
如图3所示为电动汽车有序控制前后的总负荷曲线,即基础负荷以及电动汽车充电负荷的情况。可以看出,无序充电的用电高峰期和基础负荷高峰期相重合,峰谷差为2016.7kw;而有序充电将其负荷峰值进行转移,填补了在低谷时段的负荷,使得整体充电负荷更加平稳,有序充电峰谷差为1029.1kw;有序充电较无序充电峰谷差下降了43.9%。
[0170]
另外,有序充电策略对于减少用户的充电花费也有很大的作用。按照郑州市政策电价进行设置,可以计算得到如表2所示的无序和有序充电两种情况下峰平谷各时段的花费以及总花费情况。可以看出,在进行有序充电优化后,总费用减少了28.96%,显著降低了用电费用。
[0171]
表2电动汽车在峰平谷电价时段花费
[0172][0173]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips