
 商标分类
商标分类  商标转让
商标转让 
一种车辆行驶状态监控方法及系统与流程
 2021-02-03 15:02:46|
2021-02-03 15:02:46| 520|
520| 起点商标网
起点商标网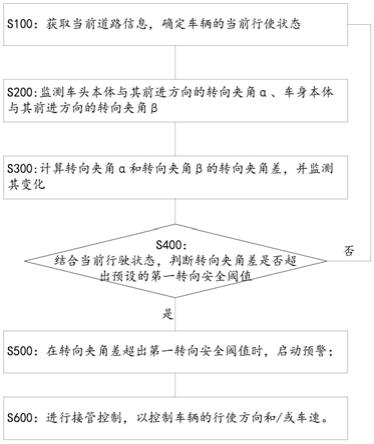
[0001]
本公开涉及半导体器件应用技术领域,尤其涉及一种车辆行驶状态监控方法及系统。
背景技术:
[0002]
随着经济的高速发展,国内物流货运车辆的保有量是越来越大,车辆的安全和监管是运营过程中至关重要的问题,特别是大型货车、危化品货车、拖挂式的长公交汽车、大型工程机械车等。同时,人们也越来越重视车辆运输安全,并且随着技术的快速发展,为了实现高效监管及安全行驶,车辆监控系统的网络化、智能化的需求日益强烈。
[0003]
然而,目前进行车辆安全监控需要昂贵的lidar(light detection and ranging,激光探测与测量)、radar(radio detection and ranging,无线电探测和测距)、imu(inertial measurement unit,惯性测量装置)等设备,且缺乏性价比高的传感监测设备,致使监测成本居高不下,甚至高于车辆本身的价格,这样一来,对于大量低端车辆或成本有限的主体来讲,监控其车辆安全行驶的需求短期内无法得到满足。
技术实现要素:
[0004]
有鉴于此,本公开提供一种车辆行驶状态监控方法及系统,不仅能够有效预防事故发生,而且监控车辆行使状态的成本低,至少部分解决现有技术中存在的问题。
[0005]
为解决上述技术问题,本公开披露一种车辆行驶状态监控方法,该方法包括:获取当前道路信息,确定所述车辆的当前行驶状态;监测车头本体与其前进方向的转向夹角α、车身本体与其前进方向的转向夹角β,计算所述转向夹角α和所述转向夹角β的转向夹角差,并监测其变化;结合所述当前行驶状态,判断所述转向夹角差是否超出预设的第一转向安全阈值,并在所述转向夹角差超出所述第一转向安全阈值时,启动预警和/或进行接管控制,以控制所述车辆的行驶方向和/或车速。
[0006]
作为一种可选的实现方式,上述车辆行驶状态监控方法还可包括:
[0007]
监测所述车头车轮与当前路面的侧倾角1,所述车身车轮与当前路面之间的侧倾角2,计算所述倾角1和所述侧倾角2之间的侧倾夹角差,并监测其变化;
[0008]
结合所述当前行驶状态,判断所述侧倾夹角差是否超出预设的第一侧倾安全阈值,并在所述侧倾夹角差超过所述第一侧倾安全阈值时,启动预警和/或进行接管控制,以控制所述车辆的行驶方向和/或车速,防止预警的危险发生。
[0009]
作为一种可选的实现方式,上述车辆行驶状态监控方法还可包括:
[0010]
获取当前道路相关的环境信息,结合所述环境信息,判断所述转向夹角差是否超出预设的第二转向安全阈值,并在所述转向夹角差超出所述第二转向安全阈值时,启动预警和/或进行接管控制,以控制所述车辆的行驶方向和/或车速,防止预警的危险发生。
[0011]
作为一种可选的实现方式,上述车辆行驶状态监控方法还可包括:
[0012]
获取当前道路相关的环境信息,结合所述环境信息,判断所述侧倾夹角差是否超
出预设的第二侧倾安全阈值,并在所述侧倾夹角差超过所述第二侧倾安全阈值时,启动预警和/或进行接管控制,以控制所述车辆的行驶方向和/或车速,防止预警的危险发生。
[0013]
作为一种可选的实现方式,上述获取当前道路相关的环境信息可进一步包括:获取所述当前道路相关的环境信息,包括路面平整度、积水、积雪、结冰中至少一种信息的解析及提取;
[0014]
根据所述环境信息,所述第二转向安全阈值和/或所述第二侧倾安全阈值设置有分级阈值参数,所述分级阈值参数与所述路面平整度、积水、积雪、结冰信息相关,不同级别的分级阈值参数对应于不同程度的平整度、积水、积雪、结冰;
[0015]
其中,所述环境信息通过设置在车辆上的环境监测装置实地监测获取;和/或,所述环境信息通过车辆网系统联网获取。
[0016]
作为一种可选的实现方式,上述车辆行驶状态监控方法还可包括:
[0017]
获取所述当前道路的道路属性信息,该道路属性信息包括限速信息、限制变道、禁止变向信息中的至少一种;
[0018]
结合所述当前行驶状态和所述道路属性信息,判断当前车辆是否违反所述道路属性信息所对应的限制性驾驶行为;
[0019]
当识别出所述限制性驾驶行为,则启动预警和/或进行接管控制,以控制所述车辆的行驶方向和/或车速,防止预警的危险发生。
[0020]
作为一种可选的实现方式,上述车辆行驶状态监控方法中,所述当前道路信息包括:车道的坡度、曲率、航向、侧倾度。所述第一转向安全阈值和/或所述第一倾角向安全阈值设置有分级阈值参数,所述分级阈值参数与所述车道的坡度、曲率、航向、侧倾度相关,不同级别的分级阈值参数对应于不同程度的坡度、曲率、航向、侧倾度。
[0021]
作为一种可选的实现方式,上述车辆行驶状态监控方法还可包括:
[0022]
监测当前车轮的转动车速;比较所述车轮的转动速度与当前车速的差异,所述车轮的转动速度高于所述车速的差值达到3%及以上,则确定所述车轮打滑,并进行预警,以启动安全措施。
[0023]
作为一种可选的实现方式,上述车辆行驶状态监控方法还可包括:
[0024]
监测驾驶员的驾驶行为及疲劳状态;当监测到所述驾驶行为属于需要预警和干预的操作,则启动预警程序和/或进行接管控制,以控制所述车辆的行驶方向和/或车速,防止预警的危险发生。
[0025]
相应地,为实现上述方法,本公开还披露一种车辆行驶状态监控系统,该系统包括:
[0026]
定位设备,内置有高精度电子地图数据,用于进行车辆定位及提取当前道路信息;
[0027]
转向监测传感器,用于实时监测车头本体与其前进方向的转向夹角α、车身本体与其前进方向的转向夹角β;
[0028]
控制处理器,集成设置于车辆电子控制系统,用于实时计算所述转向夹角α和所述转向夹角β的转向夹角差,以及用于结合所述当前行驶状态,判断所述转向夹角差是否超出预设的第一转向安全阈值,并在所述转向夹角差超出所述第一转向安全阈值时,启动预警和/或进行接管控制;
[0029]
预警装置,与所述控制处理器连接,用于根据所述控制处理器对车辆行驶状态的
判断和指令,进行预警;
[0030]
接管装置,与所述控制处理器连接,用于控制所述车辆的行驶方向和/或车速。
[0031]
作为一种可选的实现方式,上述车辆行驶状态监控系统还可包括:
[0032]
驾驶员监测装置,内置有激光雷达的头像识别的电子设备,设置于所述车辆的驾驶室内,用于监测驾驶员的驾驶行为和/或疲劳状态;和/或
[0033]
车联网系统,集成于所述车辆电子控制系统,用于通过互联网、车辆ethernet、车辆can总线上的各种传感器获取典型道路属性信息、路况信息和环境信息;和/或
[0034]
环境监测装置,用于获取所述当前道路相关的环境信息,包括路面平整度、积水、积雪、结冰中至少一种信息的解析及提取;和/或
[0035]
侧倾监测装置,用于监测所述车头的车轮、所述车身的车轮与所述当前道路之间的侧倾角1、侧倾角2;其中,所述控制处理器还用于计算所述倾角1和所述侧倾角2之间的侧倾夹角差,以及用于判断所述侧倾夹角差是否超出预设的第一侧倾安全阈值,并在所述侧倾夹角差超过所述第一侧倾安全阈值时,启动预警和/或进行接管控制,以控制所述车辆的行驶方向和/或车速,防止预警的危险发生。
[0036]
作为一种可选的实现方式,上述车辆行驶状态监控系统中,所述转向监测传感器进一步包括磁场传感器,该磁场传感器用于监测所述车头本体与其前进方向的转向夹角α、车身本体与其前进方向的转向夹角β。
[0037]
作为一种可选的实现方式,上述车辆行驶状态监控系统中,所述侧倾监测装置进一步包括:加速度传感器,用于监测路面平整度、所述车头横向加速度和所述车身的横向加速度;和/或,倾角传感器,用于监测所述车头车轮、所述车身车轮与所述当前道路之间的侧倾角1、侧倾角2;和/或,路面倾角仪,用于监测所述当前道路相对于水平面的倾角;
[0038]
作为一种可选的实现方式,上述车辆行驶状态监控系统中,所述环境监测装置进一步包括:
[0039]
摄像监测装置,用于获取所述当前道路相关的环境信息,包括路面平整度、积水、积雪、结冰中至少一种信息的解析及提取;
[0040]
温湿度传感器,用于监测路面结冰和/或积水状态数据;
[0041]
车轮转速传感器,用于监测车轮的转动速度。
[0042]
与现有技术相比,本公开披露的车辆行驶状态监控方法及系统具有以下有益效果:
[0043]
本公开通过监测当前行驶状态以及转向夹角差,在确定转向夹角差超出第一转向安全阈值时,启动预警和/或进行接管控制,以控制所述车辆的行驶方向和/或车速。本公开的车辆行驶状态监控方法及系统,不仅能够有效预防事故发生,而且监控车辆行使状态的成本低。
附图说明
[0044]
为了更清楚地说明本公开实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
[0045]
图1为本公开实施例中车辆行驶状态监控系统的组成示意图;
[0046]
图2为本公开实施例中车辆行驶状态监控方法流程示意图;
[0047]
图3为本公开实施例中盘山场景下车辆行驶状态示意图;
[0048]
图4为本公开实施例中变道场景下车辆行驶状态示意图;
[0049]
图5为本公开实施例中左转场景下车辆行驶状态示意图;
[0050]
图6为本公开实施例中转弯时车身与路面的倾角夹角示意图;以及
[0051]
图7为本公开实施例中直行时车身与路面的倾角夹角示意图。
具体实施方式
[0052]
下面结合附图对本公开实施例进行详细描述。
[0053]
需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合;并且,基于本公开中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
[0054]
需要说明的是,下文描述在所附权利要求书的范围内的实施例的各种方面。应显而易见,本文中所描述的方面可体现于广泛多种形式中,且本文中所描述的任何特定结构及/或功能仅为说明性的。基于本公开,所属领域的技术人员应了解,本文中所描述的一个方面可与任何其它方面独立地实施,且可以各种方式组合这些方面中的两者或两者以上。举例来说,可使用本文中所阐述的任何数目个方面来实施设备及/或实践方法。另外,可使用除了本文中所阐述的方面中的一或多者之外的其它结构及/或功能性实施此设备及/或实践此方法。
[0055]
为解决上述技术问题,本公开披露一种车辆行驶状态监控方法及系统。
[0056]
产品实施例:
[0057]
如图1所示,本实施例披露一种车辆行驶状态监控系统,该系统包括:定位设备、转向监测传感器、控制处理器、预警装置及接管装置。其中:
[0058]
定位设备,内置有高精度电子地图数据,用于进行车辆定位及提取当前道路信息;
[0059]
转向监测传感器用于实时监测车头本体与其前进方向的转向夹角α、车身本体与其前进方向的转向夹角β;
[0060]
控制处理器集成设置于车辆电子控制系统,用于实时计算转向夹角α和转向夹角β的转向夹角差,以及用于结合当前行驶状态,判断转向夹角差是否超出预设的第一转向安全阈值,并在转向夹角差超出第一转向安全阈值时,启动预警和/或进行接管控制;
[0061]
预警装置与控制处理器连接,用于根据控制处理器对车辆行驶状态的判断和指令,进行预警;
[0062]
接管装置与控制处理器连接,用于控制车辆的行驶方向和/或车速。
[0063]
其中,车辆包括车头和车身两部分,可选的是,车头和车身柔性连接。车身可以是一种挂接在车头的拖车箱体,如集装箱货运车辆、危化品运输罐车等。另外,对于途径驾驶行为受限路段的公共交通车辆,即便车头与车身一体或刚性连接的,也可以部署本实施例的监控系统。
[0064]
本实施例中,通过监测车辆本体与前进方向如车轮行驶方向之间的夹角,即转向夹角及其变化,来实时监控车辆的变向、变道等行驶状态及变化,以便及时发现危险,通过控制所述车辆的行驶方向和/或车速,进行干预处理。不仅能够有效预防事故发生,而且监
控车辆行使状态的成本低,至少部分解决现有技术中存在的问题。
[0065]
上述实施例中,定位设备可以采用gnss(全球导航卫星系统,global navigation satellite system)进行定位,该导航定位系统可包括gps(global positioning system,全球定位系统)、bds(beidou navigation satellite system,北斗卫星导航系统)、glonass(格洛纳斯)、伽利略等,例如本实施例中采用agps(assisted gps,辅助gps)进行车辆定位,辅助进行道路信息的监测。
[0066]
在一可选实施例中,上述控制处理器可集成设置于车辆电子控制系统,数据通过can总线或者ethernet连接。
[0067]
在一可选实施例中,上述接管装置可为方向卡锁机构,设置在方向盘连接变速箱的长柱体。本实施例中,可利用倾角传感器检测运输车辆车头倾斜度,运输车辆车头与车厢体之间的夹角。将道路倾斜角度与车头倾斜度、车头车厢间的夹角进行比较,当车头倾斜度、车头车厢间的夹角严重偏离道路倾斜角度时,控制处理器触发车辆方向卡锁机构,控制车辆转向,直到满足安全阈值控制处理器解除方向卡锁机构。
[0068]
作为一种可选的实现方式,上述实施例的车辆行驶状态监控系统还可包括:驾驶员监测装置,该驾驶员监测装置内置有激光雷达的头像识别的电子设备,设置于车辆的驾驶室内,用于监测驾驶员的驾驶行为和/或疲劳状态。
[0069]
本实施例中,在监测到驾驶员处于疲劳状态如连续打哈欠,或者注意力缺失,如目光偏离行驶方向或闭眼时间超过安全阈值上限,则即时发出警示。又如,监测到驾驶员的危险驾驶行为如在行驶方向受限的道路上变道、拐弯等,即时发出预警,甚至启动接管装置,强行干预,以避免事故发生。
[0070]
作为一种可选的实现方式,上述实施例的车辆行驶状态监控系统还可包括:车联网系统,该车联网系统集成于车辆电子控制系统,用于通过互联网、车辆ethernet、车辆can总线上的各种传感器获取典型道路属性信息、路况信息和环境信息。
[0071]
作为一种可选的实现方式,上述实施例的车辆行驶状态监控系统还可包括:环境监测装置,用于获取当前道路相关的环境信息,包括路面平整度、积水、积雪、结冰中至少一种信息的解析及提取。可选的是,该环境监测装置可采用摄像头,来监测路面基本情况。
[0072]
作为一种可选的实现方式,上述实施例的车辆行驶状态监控系统还可包括:侧倾监测装置,该侧倾监测装置用于监测车头、车身与当前道路之间的侧倾角1、侧倾角2。
[0073]
本实施例中,控制处理器还用于计算倾角1和侧倾角2之间的侧倾夹角差,以及用于判断侧倾夹角差是否超出预设的第一侧倾安全阈值,并在侧倾夹角差超过第一侧倾安全阈值时,启动预警和/或进行接管控制,以控制车辆的行驶方向和/或车速,防止预警的危险发生。
[0074]
作为一种可选的实现方式,上述实施例中,转向监测传感器可进一步包括磁场传感器,该磁场传感器用于监测所述车头本体与其前进方向的转向夹角α、车身本体与其前进方向的转向夹角β。
[0075]
作为一种可选的实现方式,上述实施例中,侧倾监测装置可进一步包括:加速度传感器,该加速度传感器用于监测路面平整度、车头横向加速度和车身的横向加速度。
[0076]
作为一种可选的实现方式,上述实施例中,侧倾监测装置可进一步包括:倾角传感器,用于监测车头车轮、车身车轮与当前道路之间的侧倾角1、侧倾角2。
[0077]
作为一种可选的实现方式,上述实施例中,侧倾监测装置可进一步包括:路面倾角仪,用于监测当前道路相对于水平面的倾角。
[0078]
作为一种可选的实现方式,上述实施例中,侧倾监测装置可进一步包括:胎压监测传感器,胎压监测传感器设置于车辆轮胎夹层。
[0079]
作为一种可选的实现方式,上述实施例中,侧倾监测装置可进一步包括:加速度传感器,加速度传感器置于钢性连接车头和车厢框架的任意方便安装的位置,用于测量车辆的横向加速度横向加速度;车身的倾角、车头横向加速度信息、拖挂车横向加速度信息,用于判断车辆行驶状态、侧倾或变向程度等。
[0080]
作为一种可选的实现方式,上述实施例中,环境监测装置可进一步包括:摄像监测装置,用于获取当前道路相关的环境信息,包括路面平整度、积水、积雪、结冰中至少一种信息的解析及提取。
[0081]
作为一种可选的实现方式,上述实施例中,环境监测装置可进一步包括:温湿度传感器,用于监测路面结冰和/或积水状态数据。
[0082]
作为一种可选的实现方式,上述实施例中,环境监测装置可进一步包括:车轮转速传感器,用于监测车轮的转动速度。
[0083]
在一可选实施例中,车辆行驶状态监控系统可包括部署在车身包括车头及其车身上的各类传感器,用于监测车头及其车身的状态信息、周围地理环境信息等。
[0084]
进一步来讲,上述周围地理环境信息主要包括以下几种:
[0085]
1)路况信息:路面结冰打滑,路面倾角,道路拐弯等;
[0086]
2)道路定位及属性信息:该属性信息与道路周围地理环境信息相关,与该周围地理环境信息如湖泊、河流、山沟、隧道、桥梁等等相关的道路属性包括:限速信息、限制变道、禁止变向信息中的至少一种。
[0087]
3)其他会导致驾驶员视野受限,行驶方向受限、车速受限的地理环境因素。
[0088]
例如:使用agps定位,在危险地段,限制或者锁死车辆的超速、拐弯、以及其他导致离心力过大的驾驶行为。通过比对、处理上述信息,发出危险行车警示,严重时,锁死车辆的速度、拐弯功能,以避免事故的发生。
[0089]
需要指出的是,上述各实施例披露的车辆行驶状态监控系统适用于各种货运车辆,特别是危化品运输车辆、公共交通车辆以及集装箱拖运车,通过部署上述实施例的监控系统可以有效预防危化品车辆的行驶过程中事故,预警并干预危险驾驶行为如大桥上横向拐弯等,以避免人员伤亡及其他损失。
[0090]
方法实施例:
[0091]
相应地,本实施例披露一种车辆行驶状态监控方法,可采用上述任一实施例披露的车辆行驶状态监控系统来实施本实施例的监控方法。
[0092]
如图2所示,其为本实施例的车辆行驶状态监控方法的流程示意图。本实施例的监控方法包括以下流程步骤:
[0093]
s100:获取当前道路信息,确定车辆的当前行驶状态;
[0094]
s200:监测车头本体与其前进方向的转向夹角α、车身本体与其前进方向的转向夹角β;
[0095]
如图3至图5所示,其分别示出了不同场景下车头、车身的转向夹角的变化,通过车
头倾斜度、车头车身间的夹角的对比,判断车辆的驾驶状态,如直线、盘山、变道,举例说明如下:
[0096]
1)盘山或弯路行驶:
[0097]
如图3所示,当前道路的曲率弧度为γ,车头本体与前进方向之间的转向夹角α、车身本体与其前进方向的转向夹角β。直线行驶场景下,两个转向夹角的夹角差几乎为零;而盘山场景下,两个转向夹角设置有安全驾驶的最大值,即转向安全阈值,转向夹角的测量可以使用磁场传感器。盘山时,内圈车轮转速慢,外圈车轮转速快。
[0098]
2)变道场景:
[0099]
如图4所示,变道场景下,车头先出现横向加速度,加速度逐渐减小为零;车身后出现横向加速度,加速度逐渐减小为零。上述现象发生的同时,车头、车身的前进方向的转向夹角从0增加,然后降低为0。
[0100]
3)左转弯场景
[0101]
如图5所示,左转弯场景下,车头先出现横向加速度,车身后出现横向加速度,车头、车身的前进方向的转向夹角从0增加至最大,然后降低为0。
[0102]
在转向时,离心力-轮胎摩擦力小于mv2/r,轮胎摩擦力和胎压,轮胎新旧,地面平整度等因素有关,一般驾驶员按照经验控制车速,但通过本实施例的监控系统可以有效监控车速及方向,保证行驶安全。
[0103]
s300:计算转向夹角α和转向夹角β的转向夹角差,并监测其变化;
[0104]
s400:结合当前行驶状态,判断转向夹角差是否超出预设的第一转向安全阈值;
[0105]
s500:在转向夹角差超出第一转向安全阈值时,启动预警;
[0106]
s600:进行接管控制,以控制车辆的行驶方向和/或车速。
[0107]
本实施例中,通过监测转向夹角α和转向夹角β的转向夹角差,对车辆的行驶状态进行监控,预测并防止出现安全事故。
[0108]
作为一种可选的实现方式,基于上述实施例,参图6图7所示,该车辆行驶状态监控方法还可包括:
[0109]
s210:监测车头车轮与当前路面的侧倾角1,车身车轮与当前路面之间的侧倾角2,
[0110]
s310:计算倾角1和侧倾角2之间的侧倾夹角差,并监测其变化;
[0111]
s410结合当前行驶状态,判断侧倾夹角差是否超出预设的第一侧倾安全阈值;
[0112]
s510:在侧倾夹角差超过第一侧倾安全阈值时,启动预警;
[0113]
s610:进行接管控制,以控制车辆的行驶方向和/或车速,防止预警的危险发生。
[0114]
可选地,上述实施例中,当所述前进方向角超过前进方向角夹角的安全阈值时,驾驶员调整方向盘或减速;当所述与路面的倾角超过倾角安全阈值时,驾驶员应该减速,并尽可能控制匀速行驶。
[0115]
可选地,上述实施例中,获取当前道路信息进一步包括:利用agps定位数据,提取当前道路的坡度、曲率、航向及侧倾度。
[0116]
可选地,上述实施例中,获取当前道路信息进一步包括:利用高精度电子地图数据,获取当前道路的、曲率、航向及侧倾度。
[0117]
可选地,上述实施例中,获取当前道路信息进一步包括:通过倾角传感器和加速度传感器监测所述当前道路的、曲率、航向及侧倾度。
[0118]
作为一种可选的实现方式,基于上述实施例,该车辆行驶状态监控方法还可包括:
[0119]
s220:获取当前道路相关的环境信息;
[0120]
s320:结合环境信息,判断转向夹角差是否超出预设的第二转向安全阈值;
[0121]
s420:在转向夹角差超出第二转向安全阈值时,启动预警
[0122]
s520:进行接管控制,以控制车辆的行驶方向和/或车速,防止预警的危险发生。
[0123]
作为一种可选的实现方式,基于上述实施例,该车辆行驶状态监控方法还可包括:
[0124]
s230:获取当前道路相关的环境信息;
[0125]
s330:结合环境信息,判断侧倾夹角差是否超出预设的第二侧倾安全阈值;
[0126]
s430:在侧倾夹角差超过第二侧倾安全阈值时,启动预警;
[0127]
s530:进行接管控制,以控制车辆的行驶方向和/或车速,防止预警的危险发生。
[0128]
可选的是,上述实施例中,步骤s230:获取当前道路相关的环境信息可进一步包括:
[0129]
s231:获取当前道路相关的环境信息,包括路面平整度、积水、积雪、结冰中至少一种信息的解析及提取;
[0130]
s231:根据环境信息,第二转向安全阈值和/或第二侧倾安全阈值设置有分级阈值参数,分级阈值参数与路面平整度、积水、积雪、结冰信息相关,不同级别的分级阈值参数对应于不同程度的平整度、积水、积雪、结冰。
[0131]
例如,将阈值参数的分级维度包括路面平整度、积水、积雪、结冰四个维度,每个维度分别设置三个级别,对应每种维度的每个级别设置一个阈值参数和权重。那么,单一场景下,即只涉及一个维度时,如或路面不平整、或积水、或积雪、或结冰时,阈值参数可以调用该维度的对应级别设置的参数值;对于复合场景下,可以根据所涉及的维度级别和权重,生成复合的第二转向安全阈值和/或第二侧倾安全阈值。
[0132]
在一可选实施例中,环境信息可选通过设置在车辆上的环境监测装置实地监测获取。环境信息可选通过车辆网系统联网获取。
[0133]
作为一种可选的实现方式,基于上述任一种实施例,该车辆行驶状态监控方法还可包括:
[0134]
s240:获取当前道路的道路属性信息,该道路属性信息包括限速信息、限制变道、禁止变向信息中的至少一种;
[0135]
s340:结合当前行驶状态和道路属性信息,判断当前车辆是否违反道路属性信息所对应的限制性驾驶行为;
[0136]
s440:当识别出限制性驾驶行为,则启动预警;
[0137]
s540:进行接管控制,以控制车辆的行驶方向和/或车速,防止预警的危险发生。
[0138]
在一可选实施例中,当前道路信息包括:车道的坡度、曲率、航向、侧倾度。
[0139]
在一可选实施例中,在一可选实施例中,第一转向安全阈值和/或第一倾角向安全阈值设置有分级阈值参数,分级阈值参数与车道的坡度、曲率、航向、侧倾度相关,不同级别的分级阈值参数对应于不同程度的坡度、曲率、航向、侧倾度。
[0140]
作为一种可选的实现方式,基于上述任一种实施例,该车辆行驶状态监控方法还可包括:
[0141]
s250:监测当前车轮的转动车速;
[0142]
s350:比较车轮的转动速度与当前车速的差异;
[0143]
s450:车轮的转动速度高于车速的差值达到3%及以上,则确定车轮打滑,并进行预警,以启动安全措施。
[0144]
作为一种可选的实现方式,基于上述任一种实施例,该车辆行驶状态监控方法还可包括:
[0145]
s260:监测驾驶员的驾驶行为及疲劳状态;
[0146]
s360:当监测到驾驶行为属于需要预警和干预的操作,则启动预警程序;
[0147]
s460:进行接管控制,以控制车辆的行驶方向和/或车速,防止预警的危险发生。
[0148]
本实施例通过监测当前行驶状态以及转向夹角差,在确定转向夹角差超出第一转向安全阈值时,启动预警和/或进行接管控制,以控制所述车辆的行驶方向和/或车速。本公开的车辆行驶状态监控方法及系统,不仅能够有效预防事故发生,而且监控车辆行使状态的成本低。
[0149]
以上所述,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本公开的保护范围之内。因此,本公开的保护范围应以权利要求的保护范围为准。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips