
 商标分类
商标分类  商标转让
商标转让 
基于CATIA的汽车前桥纵置板簧跳动仿真的约束方法与流程
 2021-02-03 15:02:59|
2021-02-03 15:02:59| 320|
320| 起点商标网
起点商标网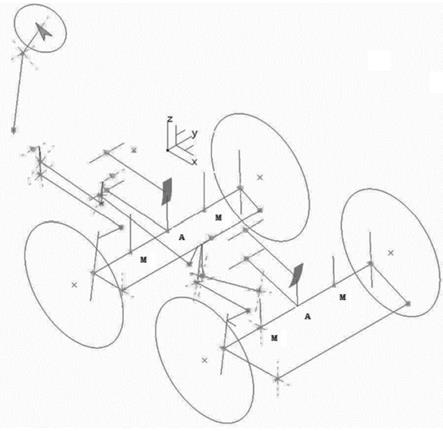
基于catia的汽车前桥纵置板簧跳动仿真的约束方法
技术领域
[0001]
本发明属于汽车技术领域,具体涉及基于catia的汽车前桥纵置板簧跳 动仿真的约束方法。
背景技术:
[0002]
汽车行驶过程中,由于左右两侧板簧各自独立柔性变形引起的前桥上、 下跳动的轨迹较为复杂,目前基于catia的dmu仿真较难处理,尤其在前桥轴 向旋转的自由度方面很难约束。因此,往往在做运动仿真时直接使用菱形 接合简化为上下滑动。简化上下滑动的方法无法进行转向悬架运动协调性 的校核,其次无法精确的检查轮胎与周围零件的动态干涉情况。
技术实现要素:
[0003]
本发明的目的是提供基于catia的汽车前桥纵置板簧跳动仿真的约束 方法,实现转向悬架运动协调性的仿真校核,同时精确的检查了轮胎与周 围零件的动态干涉情况。
[0004]
本发明的技术方案是,基于catia的汽车前桥纵置板簧跳动仿真的约 束方法具体步骤如下:
[0005]
第一步,简化两侧板簧模型:
[0006]
将板簧中心点a点的轨迹简化为一圆弧,其圆心为q点,车辆的左侧板 簧上a点、右两板簧上a点的跳动轨迹均简化为以q点为轴心的旋转运动, u型螺栓夹紧段内的前桥轴心点m点即为桥简化线与板簧宽度中线横截面 的交点,m点有4个,第一前桥简化线与左侧板簧和右两侧板簧宽度中线 横截面的交点,第二前桥简化线与左侧板簧和右两侧板簧宽度中线横截面 的交点;
[0007]
第二,建立骨架模型:根据左侧板簧上a点、右侧板簧上a点、第一 前桥简化线上m点和第二前桥简化线上m点分别采用catia中的“cv接 合”指令,实现左侧板簧、右两侧板簧各自带有命令时的自由度为零;
[0008]
第三步,第一前桥简化线与左侧板簧上的相应m点进行“点曲线接合”, 第一前桥简化线与右侧板簧上的相应m点进行“点曲线接合”;同理,第二 前桥简化线与左侧板簧上的相应m点进行“点曲线接合”,第二前桥简化线 与右侧板簧上的相应m点进行“点曲线接合”;再将两个前桥简化线中点分 别与车架纵向中心面进行“点曲面接合”,左侧板簧上a点、右侧板簧上a 点在两个前桥纵向中心面上的投影与a点轨迹圆弧沿车辆横截面的水平方 向拉伸形成半圆柱曲面,对半圆柱曲面进行“点曲面接合”。
[0009]
本发明的有益效果是,本发明将板簧柔性变形简化为刚性的圆弧运动, 通过建立前桥上虚拟的a点并按照平移运动的原则实现点曲面接合,实现 转向悬架运动协调性的仿真校核,同时精确的检查了轮胎与周围零件的动 态干涉情况,本发明减小设计人员的计算量,提高工作效率,提高计算结 果的准确度,获得转向垂臂任意位置摆角与等效阻力距的函数关系曲线图。
附图说明
[0010]
图1为本发明基于catia的汽车前桥纵置板簧跳动仿真的约束方法中简 化模型的结构示意图。
具体实施方式
[0011]
下面结合说明书附图对本发明的技术方案作进一步详细描述。
[0012]
本发明基于catia的汽车前桥纵置板簧跳动仿真的约束方法具体步骤 如下:
[0013]
第一步,简化两侧板簧模型:
[0014]
汽车行驶过程中,由于左、右两侧板簧各自独立变形引起的前桥上、 下跳动较为复杂,对一般的板簧(对称或近似对称)而言,在前桥上、下 跳动时,u型螺栓夹紧段与前桥一起作平移运动,其中u型螺栓为前桥与 板簧的连接螺栓。第一前桥简化线采用前桥轴线,
[0015]
如图1所示,将板簧中心点a点的轨迹简化为一圆弧,其圆心为q点,q 点具体位置依据《汽车设计》基础理论,根据实际工况确定。因此,车辆 的左侧板簧上a点、右两板簧上a点的跳动轨迹均可以简化为以q点为轴 心的旋转运动,u型螺栓夹紧段内的前桥轴心点m点随a点一起作平移运 动。u型螺栓夹紧段内的前桥轴心点m点即为桥简化线与板簧宽度中线横 截面的交点,m点有4个,第一前桥简化线与左侧板簧和右两侧板簧宽度 中线横截面的交点,第二前桥简化线与左侧板簧和右两侧板簧宽度中线横 截面的交点。
[0016]
第二,建立骨架模型。根据左侧板簧上a点、右侧板簧上a点、第一 前桥简化线上m点和第二前桥简化线上m点分别采用catia中的“cv接 合”指令,实现左侧板簧、右两侧板簧各自带有命令时的自由度为零。
[0017]
第三步,第一前桥简化线与左侧板簧上的相应m点进行“点曲线接合”, 第一前桥简化线与右侧板簧上的相应m点进行“点曲线接合”。同理,第二 前桥简化线与左侧板簧上的相应m点进行“点曲线接合”,第二前桥简化线 与右侧板簧上的相应m点进行“点曲线接合”;再将两个前桥简化线中点分 别与车架(即车辆)纵向中心面(即x-z平面,z为垂直方向,x为纵截面 的水平方向)进行“点曲面接合”,左侧板簧上a点、右侧板簧上a点在两 个前桥纵向中心面(即x-z平面)上的投影与a点轨迹圆弧沿车辆y(横 截面的水平方向)方向拉伸形成半圆柱曲面,对半圆柱曲面进行“点曲面 接合”,从而实现了前桥板簧的自由度为零,即f=6-2-2-1-1=0,此方法可 以准确的模拟前桥跳动,且左侧板簧与右侧板簧跳动对称。
[0018]
通过上述接合约束、整车转向模拟,从而建立对转向垂臂和所有轮胎 的角速度和角度监测、将车辆右转极限位置至左转极限位置的全过程模拟 仿真结果导出;计算轮胎原地转向阻力距:逐个计算出每个轮胎的转向阻 力距,绘制轮胎原地转向等效转向阻力矩曲线,横坐标为转向垂臂摆角, 纵坐标为轮胎原地转向等效转向阻力矩。本发明减小设计人员的计算量, 提高工作效率,提高计算结果的准确度,获得转向垂臂任意位置摆角与等 效阻力距的函数关系曲线图。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips