
 商标分类
商标分类  商标转让
商标转让 
用于正面吊的人物识别及盲区预警探测系统及探测方法与流程
 2021-02-03 15:02:38|
2021-02-03 15:02:38| 384|
384| 起点商标网
起点商标网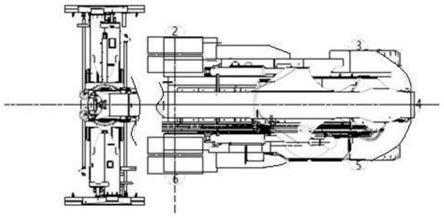
用于正面吊的人物识别及盲区预警探测系统及探测方法
[0001]
技术领域
[0002]
本发明涉及一种用于正面吊的人物识别及盲区预警探测系统及探测方法,属于工程机械技术领域。
背景技术:
[0003]
作为流动式港机,集装箱正面吊运起重机有较多的视野盲区,而港口及堆场内的作业安全问题被给予越来越多的关注,随着技术的发展和进步,视觉识别及雷达信息融合探测车辆周围障碍物对于提升作业安全有很大优势,将逐步成为市场主流,现有的倒车监控及倒车雷达已不能满足当前激烈的市场竞争需求,需要有全新的视觉及雷达信息融合技术以提升产品的市场竞争力。
[0004]
现有技术1:cn108944680a公开一种基于环视系统的雷达辅助行车系统,该文献揭示了一种基于环视系统的雷达辅助行车系统,包括:设置在汽车内的车载导行主控制系统、与所述车载导行主控制系统电性连接的行车雷达控制器、传感器、超声波发射器、若干个摄像头、雷达探头、报警装置,当开启雷达辅助行车系统时,所述行车雷达控制器接收若干摄像头将采集的到视频画面和雷达探头探测的汽车外围障碍物距离数据后,进行处理将数据参数发送至所述车载导行主控制系统,所述车载导行主控制系统根据行车雷达控制器发送的参数信息,判断车身与障碍物的距离小于所述报警电路模块中的车距预设值时,启动报警装置并将距离信息显示在所述车载导行主控制系统中的显示屏上。本发明采用基于环视系统的雷达辅助行车系统,可以完全消除因视觉偏差所引起的距离感不强等问题,可以大幅度的提高行车安全。
[0005]
现有技术2:cn109253720a 公开一种摄像头与激光雷达融合系统,该文献公开了一种摄像头与激光雷达融合系统,包括激光雷达和摄像头模组,激光雷达与摄像头模组相连;摄像头模组包括至少一个第一摄像头和至少一个第二摄像头,第一摄像头用于实现360
°
环视图像采集,第二摄像头用于实现前视图像采集;激光雷达包括转子和设于转子上的至少一个透镜组,透镜组可随转子相对于摄像头模组旋转;当透镜组旋转到预设位置时,触发摄像头模组进行拍照。本发明能够完成激光雷达与第一摄像头和第二摄像头的信息同步采集,并通过后期参数标定,使第一摄像头和第二摄像头采集的图像数据与激光雷达采集的点云数据融合,得到像素和点云之间的精确的坐标映射关系,实现了空间匹配,提高了探测准确性,丰富了被探测物体的信息。
[0006]
现有技术均有各自缺陷:现有技术1中检测到的图像数据不能实时直观的传递给操作人员,并且不能分辨障碍物及人物信息,不利于工程机械在狭小空间内作业,容易产生误报信息,当距离低于安全距离时,车辆不能自动刹车,进行主动安全保护。现有技术2中将摄像头数据与激光雷达数据进行融合探测,但该系统优势在于对复杂行车环境下的物体识别并用于决策分析,其传感器布置方式不利于工程机械等大型机械进行近距离、低速状态
下的工作环境,并且同样不利于工程机械在狭小空间内作业,容易产生误报信息,当距离低于安全距离时,车辆不能自动刹车,进行主动安全保护。
技术实现要素:
[0007]
本发明的目的在于,克服现有技术存在的技术缺陷,解决上述技术问题,提出用于正面吊的人物识别及盲区预警探测系统及探测方法,采用摄像头及毫米波雷达信息进行融合,摄像头可以识别人物与集装箱区别,可以排除狭小空间内作业时集装箱误报信息,毫米波雷达精确测量障碍物距离信息可以结合车载控制器实现提示距离及自动刹车功能。
[0008]
本发明具体采用如下技术方案:用于正面吊的人物识别及盲区预警探测系统,所述探测系统包括:设置于正面吊四周的摄像头组件,用于执行:采集车辆四周360度图像数据实时显示在车辆操纵室内独立显示器中,排除正面吊视野盲区;设置于后配重的雷达组件,用于执行:对正面吊后方障碍物进行测量距离以及靠近车辆的速度,并根据需要触发主动制动。
[0009]
作为一种较佳的实施例,所述摄像头组件包括:第一摄像头、第二摄像头、第三摄像头、第四摄像头、第五摄像头、第六摄像头,所述第一摄像头、所述第二摄像头分别设置于车辆中心面的前后两侧,所述第三摄像头、所述第四摄像头分别设置于车辆左侧的前后轮胎罩板上方;所述第五摄像头、所述第六摄像头分别设置于车辆右侧的前后轮胎罩板上方。
[0010]
作为一种较佳的实施例,所述第一摄像头、所述第二摄像头、所述第三摄像头、所述第四摄像头、所述第五摄像头和所述第六摄像头通过全景图像拼接,将车辆四周360度图像数据实时显示在车辆操纵室内独立显示器中,实现对车辆四周状态进行监控。
[0011]
作为一种较佳的实施例,所述雷达组件用于执行:当障碍物以高速接近车辆时,需要快速主动触发制动以防止事故发生,当障碍物低速接近车辆时且正面吊正在狭小空间内作业,不进行制动动作,但会在后方的摄像头组件所在的全景图像中通过带有不同颜色的边框进行提示操作者距离障碍物的距离。
[0012]
作为一种较佳的实施例,所述雷达组件采用两个毫米波雷达。
[0013]
本发明还提出用于正面吊的人物识别及盲区预警探测方法,包括:设置于正面吊四周的摄像头组件采集车辆四周360度图像数据实时显示在车辆操纵室内独立显示器中,排除正面吊视野盲区;设置于后配重的雷达组件对正面吊后方障碍物进行测量距离以及靠近车辆的速度,并根据需要触发主动制动。
[0014]
作为一种较佳的实施例,所述摄像头组件包括:第一摄像头、第二摄像头、第三摄像头、第四摄像头、第五摄像头、第六摄像头,所述第一摄像头、所述第二摄像头分别设置于车辆中心面的前后两侧,所述第三摄像头、所述第四摄像头分别设置于车辆左侧的前后轮胎罩板上方;所述第五摄像头、所述第六摄像头分别设置于车辆右侧的前后轮胎罩板上方。
[0015]
作为一种较佳的实施例,所述第一摄像头、所述第二摄像头、所述第三摄像头、所述第四摄像头、所述第五摄像头和所述第六摄像头通过全景图像拼接,将车辆四周360度图像数据实时显示在车辆操纵室内独立显示器中,实现对车辆四周状态进行监控。
[0016]
作为一种较佳的实施例,所述雷达组件用于执行:当障碍物以高速接近车辆时,需
要快速主动触发制动以防止事故发生,当障碍物低速接近车辆时且正面吊正在狭小空间内作业,不进行制动动作,但会在后方的摄像头组件所在的全景图像中通过带有不同颜色的边框进行提示操作者距离障碍物的距离。
[0017]
作为一种较佳的实施例,所述雷达组件采用毫米波雷达。
[0018]
本发明所达到的有益效果:第一,本发明的探测系统及探测方法采用车辆四周6个摄像头全景拼接,实现对车辆四周无死角360
°
视觉监控,可有效避免正面吊所有盲区,提高操作者对周围环境的监控能力。第二,本发明对人物和其他障碍物分别识别,可以实现在作业环境内对人物的重点保护以及防止在狭小空间内作业时,对集装箱等障碍物误预警,提高工作效率。第三,本发明的毫米波雷达精确的距离信息以及障碍物速度信息,可以与环视系统融合显示,在操纵室内部全景显示器中进行不同级别的预警,并为自动刹车提供距离及速度数据,提高正面吊作业安全性。
附图说明
[0019]
图1是本发明的用于正面吊的人物识别及盲区预警探测系统的优选实施例的应用示意图。
[0020]
图中标记的含义:1-第一摄像头,2-第三摄像头,3-第四摄像头,4-第二摄像头,5-第五摄像头,6-第六摄像头。
具体实施方式
[0021]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0022]
实施例1:如图1所示,本发明提出用于正面吊的人物识别及盲区预警探测系统,所述探测系统包括:设置于正面吊四周的摄像头组件,用于执行:采集车辆四周360度图像数据实时显示在车辆操纵室内独立显示器中,排除正面吊视野盲区;设置于后配重的雷达组件,用于执行:对正面吊后方障碍物进行测量距离以及靠近车辆的速度,并根据需要触发主动制动。
[0023]
可选的,所述摄像头组件包括:第一摄像头、第二摄像头、第三摄像头、第四摄像头、第五摄像头、第六摄像头,所述第一摄像头、所述第二摄像头分别设置于车辆中心面的前后两侧,所述第三摄像头、所述第四摄像头分别设置于车辆左侧的前后轮胎罩板上方;所述第五摄像头、所述第六摄像头分别设置于车辆右侧的前后轮胎罩板上方。
[0024]
可选的,所述第一摄像头、所述第二摄像头、所述第三摄像头、所述第四摄像头、所述第五摄像头和所述第六摄像头通过全景图像拼接,将车辆四周360度图像数据实时显示在车辆操纵室内独立显示器中,实现对车辆四周状态进行监控。
[0025]
可选的,所述雷达组件用于执行:当障碍物以高速接近车辆时,需要快速主动触发制动以防止事故发生,当障碍物低速接近车辆时且正面吊正在狭小空间内作业,不进行制动动作,但会在后方的摄像头组件所在的全景图像中通过带有不同颜色的边框进行提示操作者距离障碍物的距离。
[0026]
可选的,所述雷达组件采用两个毫米波雷达。
[0027]
实施例2:本发明还提出用于正面吊的人物识别及盲区预警探测方法,包括:设置于正面吊四周的摄像头组件采集车辆四周360度图像数据实时显示在车辆操纵室内独立显示器中,排除正面吊视野盲区;设置于后配重的雷达组件对正面吊后方障碍物进行测量距离以及靠近车辆的速度,并根据需要触发主动制动。
[0028]
可选的,所述摄像头组件包括:第一摄像头、第二摄像头、第三摄像头、第四摄像头、第五摄像头、第六摄像头,所述第一摄像头、所述第二摄像头分别设置于车辆中心面的前后两侧,所述第三摄像头、所述第四摄像头分别设置于车辆左侧的前后轮胎罩板上方;所述第五摄像头、所述第六摄像头分别设置于车辆右侧的前后轮胎罩板上方。
[0029]
可选的,所述第一摄像头、所述第二摄像头、所述第三摄像头、所述第四摄像头、所述第五摄像头和所述第六摄像头通过全景图像拼接,将车辆四周360度图像数据实时显示在车辆操纵室内独立显示器中,实现对车辆四周状态进行监控。
[0030]
可选的,所述雷达组件用于执行:当障碍物以高速接近车辆时,需要快速主动触发制动以防止事故发生,当障碍物低速接近车辆时且正面吊正在狭小空间内作业,不进行制动动作,但会在后方的摄像头组件所在的全景图像中通过带有不同颜色的边框进行提示操作者距离障碍物的距离。
[0031]
可选的,所述雷达组件采用毫米波雷达。
[0032]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips