
 商标分类
商标分类  商标转让
商标转让 
车辆控制装置的制作方法
 2021-02-03 15:02:16|
2021-02-03 15:02:16| 260|
260| 起点商标网
起点商标网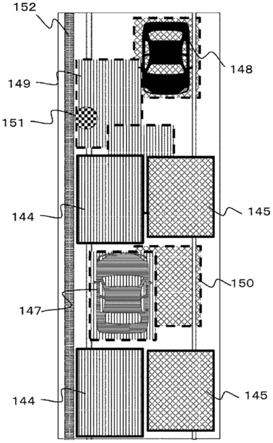
[0001]
本发明涉及车辆控制装置。
背景技术:
[0002]
近年来,由于高龄驾驶员的增加等,车辆的安全驾驶的重要性在提高,具有紧急自动制动等驾驶辅助系统的车辆在迅速普及。并且,业界对于发展驾驶辅助系统、实现车辆的自动驾驶系统是比较活跃的。
[0003]
专利文献1中记载有如下内容:在狭窄道路上行驶时识别道路宽度、障碍物等,根据自身车辆的车体宽度来判断是否是实际能行驶的路宽、执行会车的辅助。现有技术文献专利文献
[0004]
专利文献1:日本专利特开2005-326963号公报
技术实现要素:
发明要解决的问题
[0005]
在上述专利文献1记载的装置中,会根据自身车辆的宽度来判断能否通过而尝试与对向车辆的会车,但在对向车辆为挂车那样的车长较长的车辆的情况下,存在本来无法会车却认为能够会车等问题。解决问题的技术手段
[0006]
本发明的车辆控制装置具备根据外界信息来控制自身车辆的控制部,该车辆控制装置在对向车辆与所述自身车辆存在于同一车道、道路宽度为规定值以下的情况下转移至会车模式,并且具备:自身车辆用区域生成单元,其在所述会车模式下根据所述自身车辆的车宽和车长来生成所述自身车辆用会车区域;对向车辆用区域生成单元,其在所述会车模式下根据对向车辆的车宽和车长来生成对向车辆用会车区域;以及探索单元,其从所述自身车辆周边的道路中探索所述自身车辆用会车区域与所述对向车辆用会车区域不接触的位置。发明的效果
[0007]
根据本发明,能够安全地会车而不会被自身车辆及对向车辆的车长影响。
附图说明
[0008]
图1为车辆控制装置的系统构成图。图2为表示导航系统的显示例的图。图3为表示会车区域生成的具体例的图。图4为表示狭窄处的与大型车的会车的具体例的图。图5为表示弯道上的与大型车的会车的具体例的图。图6为表示会车控制部的动作的流程图。
图7为表示会车控制部的会车判定处理的流程图。图8为表示会车控制部的会车位置探索处理的流程图。图9为表示会车控制部的会车处理的流程图。
具体实施方式
[0009]
参考附图,对本发明的一实施方式进行说明。图1为车辆控制装置10的系统构成图。车辆上搭载的车辆控制装置10具备外界识别传感器11、会车控制部12、车辆控制部13、导航系统14。
[0010]
外界识别传感器11由配置在车辆周围的车载摄像机、声呐等构成,将识别出的对向车辆、人、障碍物等行驶路径上的信息输出至会车控制部12。会车控制部12根据来自外界识别传感器11、导航系统14的信息来生成向“会车模式”的转移判断和会车区域、到达路径等信息,对会车驾驶进行控制。即,会车控制部12向车辆控制部13输出舵角、制动、驱动等的命令来控制自动会车驾驶。此外,将向“会车模式”的转移、会车区域的位置等信息反馈至导航系统14。
[0011]
会车控制部12具备省略了图示的存储器及cpu,将后文叙述的图6~图9的流程图中展示的程序、车辆的信息存储至存储器,cpu读出该程序来执行处理。再者,也可利用硬逻辑电路来实现全部处理或一部分处理。进而,该程序也能以记录介质、数据信号(载波)等各种形态的电脑可读入的电脑程序产品的形式来供给。
[0012]
车辆控制部13根据舵角、制动、驱动等的命令来驱动发动机或马达而向车轮传递驱动力,从而进行车辆的行进或停止。此外,将伴随车辆的行进或停止而来的车辆的运动反馈至会车控制部12。
[0013]
图2为“会车模式”时的导航系统14的显示例。导航系统14具有显示地图信息、外界识别传感器11的影像141的显示器。于是,在会车控制部12已转变到“会车模式”的情况下,显示表示会车模式中的信息143。进而,在会车模式中,会在显示器的左部分在影像141中追加显示会车控制部12中生成的自身车辆会车区域144和对向车辆会车区域145。此外,在会车模式中,会在显示器的右部分显示自身车辆147与对向车辆148的接近部分的俯视放大影像142。再者,显示器上至少显示会车控制部12中生成的自身车辆会车区域144即可。由此,驾驶员在与对向车辆会车时能够准确地认识自身车辆147移动的位置,从而能消除会车时的不安。此外,在显示器上显示有对向车辆会车区域145的情况下,能够预测对向车辆的运动,从而能消除会车时的不安。此外,自身车辆会车区域144与对向车辆会车区域145以驾驶员能在视觉上进行区分的方式在显示器上分别辨识并区分显示。
[0014]
图3为表示会车控制部12进行的会车区域生成的具体例的图。会车控制部12根据自身车辆147和对向车辆148的车宽和车长来生成自身车辆会车区域144和对向车辆会车区域145。探索生成的会车区域彼此不重叠的位置,设定为会车位置。会车位置将自身车辆后方也作为候选。此外,会车区域彼此重叠的组合、与人或障碍物151以及水沟等不可行驶区域152重叠的会车区域设定为自身车辆不可会车区域149、对向车辆不可会车区域150。
[0015]
图4为会车控制部12进行的在狭窄处与挂车等大型车会车时的会车区域生成的具体例。在狭窄道路上有多个退避处154、155的情况下,会车控制部12在会车位置探索时对区域赋予角度来判断自身车辆会车区域144和对向车辆会车区域145能否实际退避至退避处
154、155。在图4的例子中,对向车辆148进入退避处154的会车区域成为对向车辆不可会车区域150。在像图4那样无法在前方会车时,探索自身车辆后方的退避处155等会车位置而设定自身车辆会车区域144。
[0016]
图5为会车控制部12进行的在弯道处与大型车会车时的会车区域生成的具体例。在车辆可通行的视野良好的弯道的情况下,如果彼此是普通车辆,则可以直接在弯道上会车,而在像图5所示那样自身车辆147的对向车辆148为挂车那样的大型车的情况下,在过弯时,由于余隙的原因,会产生不可行驶区域153,从而出现无法会车的情形。在图5所示的例子中,会车控制部12对进入弯道的会车设定自身车辆不可会车区域149和对向车辆不可会车区域150。因而,将进入弯道之前的自身车辆当前位置设定为会车位置来设定自身车辆会车区域144和对向车辆会车区域145。
[0017]
图6为表示会车控制部12的动作的流程图。在处理s601中,自身车辆正在自动驾驶。在下一处理s602中,由会车控制部12进行是否切换至会车模式的判定处理。若在处理s602中判定道路宽度足够等会车容易,则前进至处理s603,继续平常的自动驾驶。若在处理s602中判定会车困难,则转移至“会车模式”而前进至处理s604的会车位置探索处理,开始自动会车驾驶。处理s602的会车判定处理的详情将参考图7于后文叙述。
[0018]
会车控制部12在处理s604中若能生成会车区域、设定会车位置,则前进至处理s605的会车处理。若无法设定会车位置,则前进至处理s606而切换至手动驾驶。此外,将处理s604与处理s605合并而成的处理称为“会车模式”。处理s604的会车位置探索处理的详情将参考图8于后文叙述。
[0019]
会车控制部12在处理s605中将自身车辆控制到处理s604中设定的会车位置为止而实施与对向车辆的会车,并恢复到处理s603的自动驾驶。处理s605的会车处理的详情将参考图9于后文叙述。
[0020]
(会车判定处理)图7为表示处理s602的详情即会车判定处理的流程图。会车控制部12在处理s701中获取外界识别传感器11识别出的对向车辆的信息。具体而言,获取对向车辆的位置、车宽、车长、方向灯的显示、车牌信息。
[0021]
在处理s702中,根据处理s701中获取到的信息来判定对向车辆是否存在于与自身车辆相同的车道。具体而言,判定自身车辆与对向车辆之间有无白线/中央线、识别出的对向车辆的左端坐标是否在自身车辆行驶车道的白线坐标范围内。在不存在于相同车道的情况下,判定不需要会车,从而前进至图6所示的处理s603而继续自动驾驶。在对向车辆存在于相同车道的情况下,前进至处理s703。
[0022]
在处理s703中,从外界识别传感器11获取道路宽度,判定道路宽度窄不窄。具体而言,若满足“白线内的宽度<自身车辆宽度+对向车宽+补偿”,则判定道路宽度较窄。此外,在无法识别白线的情况下也判定道路宽度较窄。在道路宽度较宽的情况下,判定不需要会车,从而前进至图6所示的处理s603而继续自动驾驶。在道路宽度较窄的情况下,前进至图6所示的处理s604而转变为“会车模式”。模式转变后,实施缓行或限速。此外,在外界识别传感器11失效时,不作模式转变而是转移至安全状态。
[0023]
(会车位置探索处理)
图8为表示处理s604的详情即会车位置探索处理的流程图。会车控制部12在处理s801中生成用于探索会车位置的自身车辆会车区域。具体而言,从预先保存在会车控制部12的存储器中的自身车辆信息中获取自身车辆宽度和车长来生成会车区域。
[0024]
会车控制部12在处理s802中生成用于探索会车位置的对向车辆会车区域。具体而言,根据图7的处理s701中获取到的对向车宽和车长来生成会车区域。在图7的处理s701中获取到的对向车宽和车长不准确的情况下,例如在获取到的对向车长为车宽以下的情况下,会车控制部12根据从作为外界识别传感器11配置的车载摄像机获取到的对向车影像而与预先存储的车辆的影像进行车型匹配。继而,从预先存储的数据库中获取影像一致的车辆的尺寸信息(车宽及车长)。或者,识别车载摄像机拍摄到的对向车辆的车牌,从预先存储的数据库中获取与识别出的车牌相对应的车辆的尺寸信息。继而,生成基于获取到的尺寸信息的大小的对向车辆会车区域。
[0025]
会车控制部12在处理s803中探索处理s801和处理s802中生成的会车区域彼此不重叠的位置,设定为会车位置。具体而言,根据与对向车辆的相对速度和车间距离来算出与对向车辆的接触点,以该接触点为起点朝自身车辆方向逐次实施会车位置的探索,若满足“自身车辆会车区域右端x坐标<对向车辆会车区域左端x坐标”,则设为会车位置。会车位置将自身车辆后方也作为候选。此外,作为会车位置,与障碍物接触的位置要排除掉。
[0026]
在处理s804中,判定是否设定了会车位置。在已设定的情况下,转变为图6所示的处理s605的会车处理。在处理s804中未能设定会车位置的情况下,判断无法自动会车,从而转变为图6所示的处理s606的手动驾驶。具体而言,将无法自动会车这一情况经由导航系统14而通过显示或语音等报知给驾驶员,根据驾驶员的判断切换至手动驾驶。
[0027]
(会车处理)图9为表示处理s605的详情即会车处理的流程图。会车控制部12在处理s901中判定要会车的对向车辆是否已在会车位置前方停止。具体而言,根据外界识别传感器11获取到的对向车辆的位置来判定对向车辆是否已停止。在已停止的情况下,前进至处理s902。在对向车辆还在行驶的情况下,前进至处理s904。
[0028]
在处理s902中,判定能否在已停止的对向车辆的侧面进行会车。具体而言,将对向车辆位置设为对向车辆会车区域,判定能否在已停止的对向车辆的侧面设定自身车辆会车区域。
[0029]
在能够设定的情况下,前进至处理s903,在已停止的对向车辆的侧面再设定会车位置。在无法设定的情况下,使自身车辆移动至处理s803中设定的会车位置。
[0030]
在处理s904中,判定对向车辆是否会左右转。具体而言,根据处理s701中识别出的对向车辆的方向灯的显示来判定对向车辆的左右转。在对向车辆要左右转的情况下,前进至处理s905而在当前位置上停止直至对向车辆左右转完成为止。在对向车辆直线前进的情况下,前进至处理s906,使自身车辆移动至处理s803中设定的会车位置。
[0031]
在处理s907中,监视对向车辆是否已到达对向车辆会车区域。具体而言,在自身车辆到达自身车辆会车区域前判定对向车辆是否已到达对向车辆会车区域。
[0032]
在尚未到达的情况下,前进至处理s908而使自身车辆在自身车辆会车区域内停止并继续监视。在对向车辆已到达会车区域的情况下,前进至处理s909。
在处理s909中,判定自身车辆与对向车辆的距离是否相隔规定值以上而有富余。若有富余,则前进至处理s910而实施缓行下的会车,并在处理s911中等待会车完成。若处理s909中没有富余,则前进至处理s912,判定对向车辆是否已停车。在对向车辆已停车的情况下,前进至处理s910。在对向车辆还在行驶的情况下,前进至处理s913,自身车辆继续停车直至对向车辆完成会车为止,并在处理s911中等待会车完成。
[0033]
关于处理s911中视为会车完成的条件,根据自身车辆或对向车辆已在各自的行进方向上通过会车区域这一情况来视为会车完成。在处理s911中会车完成后,前进至处理s914。
[0034]
在处理s914中,在会车后移动至能够正常进行自动驾驶的位置。具体而言,使自身车辆移动至脱离自身车辆会车区域而能够自动驾驶的位置。在该情况下,例如若在自身车辆会车区域的停车位置正面有障碍物,则根据预先保存的到会车位置为止的移动路径而返回到会车处理开始位置,以避开该障碍物。前进至恢复后处理s603,转变为平常的自动驾驶。
[0035]
再者,在上述实施方式的说明中,以从自动驾驶转变为会车模式中的自动会车驾驶或者从自动会车驾驶转变为自动驾驶的例子来进行了说明,但并不限定于此,例如也可从手动驾驶转变为自动会车驾驶或者从自动会车驾驶转变为手动驾驶。
[0036]
根据以上说明过的实施方式,获得以下作用效果。(1)车辆控制装置10具备根据来自外界识别传感器11的外界信息来控制自身车辆的会车控制部12。会车控制部12在对向车辆与自身车辆存在于同一车道(s702:是)、道路宽度为规定值以下的情况下(s703:是)转移至会车模式(s604),并且具备:自身车辆用区域生成单元,其在会车模式下根据自身车辆的车宽和车长来生成自身车辆用会车区域(s801);对向车辆用区域生成单元,其在会车模式下根据对向车辆的车宽和车长来生成对向车辆用会车区域(s802);以及探索单元,其从自身车辆周边的道路中探索自身车辆用会车区域与对向车辆用会车区域不接触的位置(s803)。由此,能够安全地会车而不会被自身车辆及对向车辆的车长影响。
[0037]
本发明不限定于上述实施方式,只要无损本发明的特征,则在本发明的技术思想的范围内思索的其他形态也包含在本发明的范围内。符号说明
[0038]
10
…
车辆控制装置、11
…
外界识别传感器、12
…
会车控制部、13
…
车辆控制部、14
…
导航系统。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 道路宽度

 热门咨询
热门咨询




tips