
 商标分类
商标分类  商标转让
商标转让 
用于实施先进驾驶辅助设备的闭环的方法和设备与流程
 2021-02-03 15:02:58|
2021-02-03 15:02:58| 392|
392| 起点商标网
起点商标网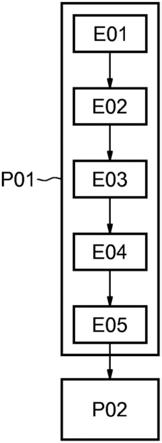
用于实施先进驾驶辅助设备的闭环的方法和设备
[0001]
本发明涉及关于机动车辆的侧向控制、并且更具体地关于使机动车辆在行车道中居中的先进驾驶员辅助的优化的领域。
[0002]
越来越多的机动车辆配备有先进驾驶员辅助系统(adas)。特别地,将先进驾驶员辅助系统结合到自主车辆中,以控制此类车辆。
[0003]
用于车辆的侧向控制的先进驾驶员辅助系统的功能是控制方向盘,以作用于车辆在道路上的侧向位置。用于侧向控制的先进驾驶员辅助系统的示例是“车道居中辅助(lane centering assist)”或lca。这种系统控制方向盘以使车辆保持在行车道的中央。
[0004]
用于侧向控制的先进驾驶员辅助系统通常包括闭环项和开环项。闭环具有缓慢的变化速率,旨在确保良好的性能水平。开环旨在确保转弯期间的良好性能。开环基于在车辆的整个寿命中保持不变的模型。
[0005]
通过这种设计,获得了温和控制,该温和控制避免了可能刺激驾驶员的急动。然而,闭环的缓慢变化速率意味着系统在参数变化方面缺乏稳健性。
[0006]
鉴于以上情况,本发明的目的是增加闭环的稳健性,该闭环提供关于机动车辆的侧向控制的先进驾驶员辅助。
[0007]
根据第一方面,提供了一种用于优化用于机动车辆的侧向控制的先进驾驶员辅助系统的闭环的方法,其中,通过使用该车辆的自行车模型求解优化问题来合成该闭环的控制器。
[0008]
根据此方法的总体特征之一,建立包含该车辆的至少两个自行车模型的族,这些自行车模型相对于彼此具有选自以下各项的至少一个偏差:该车辆的质量的偏差、该车辆的车桥组件的转弯刚度的偏差、该车辆的重心位置的偏差以及该车辆的惯性矩的偏差,使用该族中的所有模型来求解该优化问题。
[0009]
因此,考虑多个模型,以便找到允许获得对于车辆的各种配置都统一且一致的行为的单个控制器。因此,增加了先进驾驶员辅助系统的闭环的稳健性。
[0010]
有利地,与属于该族的两个模型无关,这些模型相对于彼此具有选自以下各项的至少一个偏差:该车辆的质量的偏差、该车辆的前车桥组件的转弯刚度的偏差以及该车辆的后车桥组件的转弯刚度的偏差。
[0011]
如以下所解释的,可以在车辆的质量与车辆的重心位置之间建立直接关系。如以下将解释的,该关系允许仅考虑这两个量之一的偏差。惯性矩在车辆的各种配置之间变化很小,特别是在讨论紧凑型车辆时。因此可以排除惯性矩的偏差。通过接受重心位置与质量之间的这种关系和/或通过排除惯性矩的偏差,减少了要考虑的模型数量同时保留良好的稳健性。
[0012]
在一种实施模式中,该族包括与恰好运送该车辆前部的两名乘客的车辆的配置相对应的标称自行车模型,该标称自行车模型采用该车辆的标称质量、该前车桥组件的标称转弯刚度以及该后车桥组件的标称转弯刚度,该族还包括至少一个替代性自行车模型。
[0013]
第一替代性自行车模型采用与该车辆的标称质量相等的车辆质量、比该前车桥组件的标称转弯刚度高的前车桥组件转弯刚度以及比该后车桥组件的标称转弯刚度高的后
车桥组件转弯刚度。该模型对应于具有轮胎的第一变化的车辆配置。
[0014]
第二替代性自行车模型采用与该车辆的标称质量相等的车辆质量、比该前车桥组件的标称转弯刚度低的前车桥组件转弯刚度以及比该后车桥组件的标称转弯刚度低的后车桥组件转弯刚度。该模型对应于具有轮胎的第二变化的车辆配置。
[0015]
第三替代性自行车模型采用比该车辆的标称质量高的车辆质量、比该前车桥组件的标称转弯刚度低的前车桥组件转弯刚度以及比该后车桥组件的标称转弯刚度高的后车桥组件转弯刚度。该模型对应于具有质量增加且具有轮胎的第三变化的车辆配置。
[0016]
第四替代性自行车模型采用比该车辆的标称质量高的车辆质量、与该前车桥组件的标称转弯刚度相等的前车桥组件转弯刚度以及比该后车桥组件的标称转弯刚度高的后车桥组件转弯刚度。该模型对应于具有质量增加且具有轮胎的第四变化的车辆配置。
[0017]
如以下所解释的,在保留车辆的转向不足特性的同时,前述标称自行车模型和替代性自行车模型表示车辆的非常不同的配置。现在,车辆底盘通常被构造成不会转向过度。通过仅选择保留转向不足特性的自行车模型,车辆的整体行为的真实模型是有特权的。
[0018]
在一种特别有利的实施模式中,该族包括标称自行车模型和前述四种替代性自行车模型。这种实施模式是特别有利的,因为它考虑了五种非常相关的不同配置,从而在限制要考虑的模型数量的同时尽可能显著地增加先进驾驶员辅助系统的稳健性,并且增加合成的真实感以减少不信任感。
[0019]
优选地,使用具有零初始导数的三阶模型对道路曲率进行建模,通过对该三阶模型施加不可约信号来生成环境模型,并且使用所生成的环境模型来求解该优化问题。
[0020]
道路曲率的高连续性使得这种三阶模型特别适合用于生成扰乱场景,诸如道路曲率。
[0021]
有利地,该优化问题的解包括使该不可约信号与该方向盘角度的急动之间的传递函数的范数最小化,同时遵守从选自以下各项的至少一个约束:
[0022]-第一约束,该第一约束采用该不可约信号与该车辆的重心相对于道路的行车道中央的侧向偏移之间的传递函数的范数的上限的形式;以及
[0023]-第二约束,该第二约束采用该先进驾驶员辅助系统的灵敏度函数的范数的倒数的下限的形式。
[0024]
通过求解这种问题进行合成,可以在使驾驶员的舒适性最大化的同时允许获得在性能和稳健性方面满足所需要求的先进驾驶员辅助。这样做的话,特别是在自主车辆的背景下,增加了驾驶员对先进驾驶员辅助的接受程度。
[0025]
在一种实施模式中,复平面的区域被限定在最大实部、起始于原点并与实轴成几何角度的两条半直线以及模量的等高曲线之间,该优化问题被求解为使得针对属于该族的每个模型,该控制器的极点位于所述区域中。
[0026]
该最大实部允许对先进驾驶员辅助系统的最慢变化速率设置下限。形成几何角度的这些半直线允许对先进驾驶员辅助系统的阻尼设置下限。该模量的等高曲线允许对先进驾驶员辅助系统的最高的变化速率设置上限。通过针对各种模型寻求将所有极点定位在该区域中,可以使驾驶系统的行为更加统一并且更好地符合各种配置中的要求。
[0027]
优选地,接收该闭环的传递函数的增益的最大值,该优化问题被求解为使得该最大值是该闭环的传递函数的增益的上限。
[0028]
这种上限使得避免了缺少与建模误差和噪声相关的稳健性,并且使得减小了搜索优化的空间并因此加快了合成控制器的阶段。
[0029]
在一种实施模式中,该方法旨在优化用于使机动车辆在行车道中居中的先进驾驶员辅助系统。
[0030]
根据另一方面,提供了一种包含代码的计算机程序,该代码被配置为在由处理器或电子控制单元执行时实施如以上所限定的方法。
[0031]
根据又另一个方面,提供了一种用于优化用于机动车辆的侧向控制的先进驾驶员辅助系统的闭环的设备,该设备包括用于准备优化问题的单元以及用于通过求解已准备的优化问题来合成控制器的单元。
[0032]
根据该设备的总体特征之一,该准备单元包括选择模块,该选择模块被配置为选择包含该车辆的至少两个自行车模型的族,这些自行车模型相对于彼此具有选自以下各项的至少一个偏差:该车辆的质量的偏差、该车辆的车桥组件的转弯刚度的偏差、该车辆的重心位置的偏差以及该车辆的惯性矩的偏差,该合成单元被配置为使用该族中的所有模型来求解该优化问题。
[0033]
通过阅读以下仅通过非限制性示例给出的并且参照附图进行的描述,本发明的其他目的、特征和优点将变得清楚,在附图中:
[0034]-图1是用于机动车辆的侧向控制的先进驾驶员辅助系统的框图,
[0035]-图2示意性地展示了根据本发明的一个方面的优化设备,
[0036]-图3是展示了在借助于图2的设备而实施的优化期间先进驾驶员辅助系统的操作的框图,
[0037]-图4示意性地展示了根据本发明的另一个方面的优化方法,以及
[0038]-图5是用于限定图4的方法中的优化约束的复平面的区域的图形表示。
[0039]
参照图1,已经经由框图2示意性地示出了用于机动车辆的侧向控制的先进驾驶员辅助系统的拓扑结构。在所展示的示例中,先进驾驶员辅助旨在被提供到自主车辆。然而,在不脱离本发明的范围的情况下,当然可以设想旨在被提供到由驾驶员驾驶的车辆的先进驾驶员辅助。图1中展示的系统是用于侧向控制以使车辆在行车道中居中的系统。同样,该系统同样可以很好地为不同类型的侧向控制提供先进驾驶员辅助。
[0040]
通常,框图2由闭环4和开环6组成。闭环4的功能是将车辆保持在被认为一直是笔直的虚拟车道的中央。开环6考虑了道路的曲率,并且补偿弯道对状态和控制的影响。借助于加法器8将由开环6生成的项添加到闭环4中。
[0041]
闭环4包括比较器14。参考信号s
参考
被提供到比较器14。控制器16接收由比较器14提供的信号并生成经校正信号,该经校正信号被提供到加法器8。可以对控制器16进行参数化以便优化闭环4,从而改善被提供到车辆的先进驾驶员辅助的性质。
[0042]
闭环4包括与先进驾驶员辅助系统的各种组成机械元件相对应的集合10。在所展示的示例中,集合10尤其包括先进驾驶员辅助系统的机械致动器,诸如车辆的动力转向、机动车辆本身以及车辆所配备的传感器。集合10提供由车辆的参数测量结果产生的测量信号s
测量
。
[0043]
开环6包括前馈12。前馈12接收信号s
测量
并将输出信号提供到加法器8。
[0044]
闭环4包括状态观测器18。状态观测器接收信号s
测量
和由控制器16提供的信号。状
态观测器18采用的状态表示是基于车辆的自行车模型的。对应的状态向量包含以下七个状态:
[0045][0046]
其中,是相对航向角的变化速率,ψ
r
是相对航向角,是车辆的侧向速度,y
l
是车辆的侧向偏移,是前轮角的变化速率,δ是前轮角,并且∫y
l
是横向偏移的积分。
[0047]
状态观测器18采用的状态表示如下所示:
[0048][0049]
其中,c
f
是车辆的前车桥组件的转弯刚度,c
r
是车辆的后车桥组件的转弯刚度,l
f
是前车桥与车辆重心之间的距离,l
r
是后车桥与车辆重心之间的距离,m是车辆的质量,并且i
z
是车辆的惯性矩。
[0050]
经由闭环4实现的侧向控制旨在使状态向量x最小化到约为零,这对应于直线。在转弯期间,必须校正状态ψ
r
、和δ。方向盘角度和转向车轮的角度经由车辆的动力转向而直
接相关,这对应于减速比和二阶变化速率。因此,该角度δ被认为对应于方向盘角度。
[0051]
图2示意性地示出了设备20。设备20旨在优化图1所展示的先进驾驶员辅助系统。更具体地,设备20旨在对控制器16进行参数化,以优化闭环4,从而满足被提供到车辆的先进驾驶员辅助的要求。
[0052]
设备20包括准备单元22和合成单元24。单元22的功能是准备优化问题,该优化问题的解是提供闭环4的最优特性的校正器16的一组参数。为此,单元22包括选择模块26、生成模块28和建立模块30。单元24的功能是求解由单元22提供的优化问题,以找到该解。
[0053]
模块26的功能是选择车辆的自行车模型的族。模块26将所选择的族传输到单元24,该单元使用所传输的族中的所有模型来求解优化问题。
[0054]
模块28的功能是生成表示先进驾驶员辅助系统所受到的扰动的环境模型。在当前情况下,该扰动是道路的曲率。为此,模块28包括用于对合适的传递函数进行建模的装置32。在所展示的示例中,装置32建立具有零初始导数的三阶模型。模块28能够向由装置32建立的模型馈送不可约信号,诸如白噪声或狄拉克脉冲列。如此馈送的由三阶模型提供的信号是被传输到单元24以求解优化问题的环境模型。
[0055]
模块30配备有参数化模块34。模块34的功能是生成优化标准和优化约束以限定基本的约束优化问题。
[0056]
模块30包括选择模块36,该选择模块的功能是生成附加的优化约束。模块36包括用于在复平面中限定区域的第一装置37。模块36配备有用于输入最大增益值的第二装置38。模块36能够以优化约束的形式表示校正器16的极点在由装置37限定的区域中的位置。模块36还能够以优化约束的形式表示以下事实:闭环4的传递函数的增益的上限是输入到装置38中的值。
[0057]
由模块34和36生成的优化标准和优化约束分别被提供到单元24以求解优化问题。
[0058]
在图3的框图中,已经用框39表示了由装置32建立的三阶模型。传递函数w
ρ
具有零初始导数的三阶模型。框39被馈送有不可约信号ω
ρ
。框39提供与扰动ρ相对应的信号作为输出,该信号被馈送到由框40示意性示出的增强车辆模型中。
[0059]
框40提供由车辆的参数测量结果产生的测量信号y,以及由环境的参数测量结果产生的测量信号y
环境
。与前馈12相对应的框42接收信号y
环境
并生成参考测量信号y
参考
和参考输入控制信号u
参考
。由比较器44将信号y
参考
从信号y中减去。将由比较器44生成的信号提供到对应于状态观测器18的两个框46和48。加法器50将闭环项u
fb
添加到开环项u
参考
。
[0060]
图4示意性地示出了能够用图2示出的设备20实施的优化方法。该方法包括准备第一阶段p01和合成第二阶段p02。
[0061]
阶段p01包括选择车辆的自行车模型的族的步骤e01。在步骤e01中,模块26选择车辆的至少两个自行车模型以形成族。模型是与车辆的配置相关联的一组参数。与多个模型无关,其参数的偏差对应于该多个模型中的至少两个模型之间该参数的差异的存在。
[0062]
为了使用与车辆的不同配置相对应的各种模型,该族中的模型具有选自以下各项的至少一个偏差:质量m的偏差、刚度c
f
的偏差、刚度c
r
的偏差、位置l
f
的偏差、位置l
r
的偏差以及矩阵i
z
的偏差。
[0063]
在所展示的示例中,力矩i
z
的偏差已经被排除。通过排除偏差,减少了所考虑的模型数量,并且因此求解问题的阶段p02变得更加容易。尽管如此,由于力矩i
z
在给定车辆的
各种使用配置之间变化相对较小,因此所考虑的各种配置的数量并未显著减少。如以上所解释的,在紧凑型车辆的情况下,力矩i
z
的不变性假设尤其有效。然而,本发明不限于这种背景。在不脱离本发明的范围的情况下,可以允许惯性矩的偏差,尤其在家用车辆、多用途车辆或卡车的情况下。
[0064]
此外,假设质量仅添加到车辆的后车桥。这种假设是合理的,只要前排乘客质心平齐,后排乘客略微处于后车桥的前方,并且行李箱位于后车桥的后方。在这些条件下,距离l
r
只能减小,而距离l
f
只能增大。
[0065]
与距离l
f
和前车桥上的质量m
f
以及后车桥上的质量m
r
相关的方程式如下:
[0066][0067]
其中,l
t
是该车辆的轴距。假定上述假设有效,则可以通过以下方式简化该方程式:
[0068][0069]
其中,m
f
和l
t
是常数。
[0070]
因此,距离l
f
与质量m直接相关。因此,可以消除位置l
f
或l
r
的变化中与质量m的变化无关的自由度。因此,减少了所考虑的模型的数量,但是没有显著限制所考虑的不同配置的数量。
[0071]
在所展示的示例中,质量m被认为能够在装载有两名成人乘客的车辆的质量m
标称
与允许的总载重m
ptac
之间变化。质量m
标称
对应于空载重量加160kg。质量m
ptac
根据车辆型号而变化。在所展示的示例中,通过考虑质量m在m
标称
与1.25
×
m
标称
之间变化而简化了该问题。
[0072]
刚度c
f
和c
r
与前车桥组件和后车桥组件所配备的轮胎的刚度变化有关。轮胎的刚度与大量参数有关,这些参数包括车辆的负载、温度、充气、尺寸、几何形状、转向角度和轮胎老化。为了考虑车辆轮胎的刚度,车辆的车桥组件的刚度将被认为能够在相对于标称车桥组件刚度c
f,标称
或c
r,标称
的-30%与+30%之间变化。
[0073]
因此,在所展示的示例中,所选择的模型表现出选自以下各项的偏差:质量m的偏差、刚度c
f
的偏差和刚度c
r
的偏差。可以通过选择保留了车辆的转向不足特性的模型来进一步减少模型的数量。经由通过以下表达式定义的弯道坡度的正符号来评估车辆的转向过度特性:
[0074][0075]
选择表示自行车模型的参数的最大观测变化的模型。因此,考虑在以下表格中概述的五种模型:
[0076] mc
f
c
r
∑
标称
m
标称
c
f,标称
c
r,标称
∑
替代性1
m
标称
0.7
×
c
f,标称
0.7
×
c
r,标称
∑
替代性2
m
标称
1.3
×
c
f,标称
×
1.3
×
c
r,标称
∑
替代性3
1.25
×
m
标称
0.7
×
c
f,标称
1.3
×
c
r,标称
∑
替代性4
1.25
×
m
标称
c
f,标称
1.3
×
c
r,标称
[0077]
阶段p01包括生成环境模型的步骤e02。在步骤e02中,装置32生成具有零初始导数的三阶模型w
ρ
:
[0078][0079]
模块28向模型w
ρ
馈送不可约信号ω
ρ
。这样做的话,生成了表示扰动(在当前情况下是道路的曲率ρ)的信号。优化将使用信号ρ来预测和预期{车辆-道路}系统的变化,这通过增加真实感并因此降低保守性改善了整体行为。
[0080]
由于提供了不可约信号ω
ρ
作为模型w
ρ
的输入,因此输出信号ρ的范数与传递函数w
ρ
的范数直接相关。因此,物理特性(在当前情况下是信号的能量)与传递函数的范数相关。
[0081]
阶段p01包括对基本优化问题进行参数化的步骤e03。基本优化问题是约束优化问题。因此,在步骤e03中,确定优化标准和一个或多个优化约束。
[0082]
目的在于保持处于行车道的中央的侧向控制是与舒适性相关的先进驾驶员辅助。换言之,该辅助的目的是在确保最大舒适性的同时为驾驶员提供帮助,以使驾驶员最大程度地接受该辅助。为了使舒适性最大化,寻求使方向盘角度的急动最小化。这样做的话,方向盘的急动被最小化,并且获得了类似于人类驾驶员行为的连续控制。表示急动的信号j
u
的最小化对应于该信号的能量的最小化,因此对应于其范数的最小化,并且因此对应于将框39的输入与框40的输出(见图3)相关的传递函数的范数的最小化。
[0083]
被提供到车辆的先进驾驶员辅助必须满足与低侧向偏移y
l
相对应的最小性能要求。为了确保低偏移,y
l
必须确保信号y
l
的能量低于指定目标性能水平的值k
ρ
。换言之,值k
ρ
越低,偏移yl将越低。信号y
l
的能量由传递函数的范数表示。
[0084]
在所展示的示例中,尽管车辆的动力转向的行为不确定,先进驾驶员辅助也必须是稳健的。具体地,车辆的动力转向通常作为黑盒子(black box)由供应商提供给机动车辆的制造商。因此,难以识别动力转向的控制规律。为了确保尽管动力转向的行为不确定的情况下的稳健性并确保良好的稳定性质,经由最小项k
m
对优化约束进行参数化,该优化约束对模量输入余量设置下限。该余量与闭环4的灵敏度函数s
u
(s)的峰值直接相关。更精确地,模量余量被定义为函数s
u
(s)的共振峰值的倒数,即,函数s
u
(s)的范数的倒数。
[0085]
鉴于以上情况,模块34在步骤e03中对优化标准和两个优化约束进行参数化,这可写为如下:
[0086]
最小化
[0087]
约束条件:
[0088]
阶段p01包括选择附加的优化约束的两个步骤e04和e05。
[0089]
在步骤e04中,装置37在复平面中限定区域(诸如图5所示的区域52)。区域52被限定在竖直直线54、第一斜线56、椭圆形部分58和第二斜线60之间。再次在步骤e04中,模块36
以优化约束的形式表示以下事实:校正器16的极点属于区域52。
[0090]
无论属于区域52的复数z是多少,该点都包括比竖直线54的纵坐标mindecay低的实部re(z)。换言之,关于图5的表示,区域52位于竖直线54的左侧。纵坐标mindecay表示闭环4的最慢变化速率。通过将线54设置为区域52的右边界,对闭环4的变化速率设置下限。换言之,因此使闭环4具有最小变化速率,该最小变化速率等于与纵坐标mindecay相关联的最小变化速率。
[0091]
线56和60关于实轴对称。更精确地,线56和60形成穿过复坐标系的原点的两条直线的一部分并且与实轴成角度θ。在所展示的示例中,角度θ基本上等于45
°
。通过将区域52设置在线56与线60之间,经由最小阻尼系数mindamping来调整控制器16的阻尼系数,以对闭环4的阻尼设置下限。
[0092]
椭圆形部分58是与最大模量maxfrequency相对应的模量的等高曲线。通过将区域52设置在部分58内,对闭环4的高频振动的振幅设置上限。
[0093]
在步骤e05中,将闭环4的传递函数的增益的最大值g
最大
输入到装置38中。然后模块36以附加的优化约束的形式表示以下事实:闭环4的传递函数的增益必须低于值g
最大
。
[0094]
在阶段p01结束时,获得由表示车辆的多个模型、表示车辆环境的模型组成的族以及由优化标准和优化约束限定的约束优化问题。尽管已经以一种特定顺序呈现了步骤e01至e05,但是在不脱离本发明的范围的情况下可以设想将任何数量的这些步骤的顺序颠倒。
[0095]
在阶段p02中,对基于在步骤e03、e04和e05中建立的优化标准和优化约束的优化问题进行求解。通过考虑在步骤e02中生成的环境模型并考虑在步骤e01中选择的每个模型来求解优化问题。
[0096]
通过针对五个所选择的模块中的每个模块求解优化问题,找到允许在非常多样化的车辆配置中获得统一且一致的行为的控制器。提出的环境模型以及优化标准和优化约束特别适合于促进问题的有效解,并适合于产生满足必须被提供到车辆的先进驾驶员辅助的要求的解。因此,在不显著增加计算复杂度的情况下,增加了所提供的先进驾驶员辅助的稳健性。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips