
 商标分类
商标分类  商标转让
商标转让 
一种汽车智能减震控制系统的制作方法
 2021-02-03 15:02:45|
2021-02-03 15:02:45| 361|
361| 起点商标网
起点商标网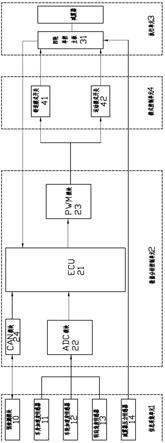
[0001]
本实用新型涉及一种汽车减震领域,具体涉及一种汽车智能减震控制系统。
背景技术:
[0002]
汽车减震系统主要用来解决路面不平而给车身带来的冲击, 加速车架与车身振动的衰减,以改善汽车的行驶平稳性。如果把发动机比喻为汽车的“心脏
”ꢀ
,变速器为汽车的“中枢神经”,那么底盘及悬挂减震系统就是汽车的“骨骼骨架”。减震系统不仅决定了一辆汽车的舒适性与操控性同时对车辆的安全性起到很大的决定作用, 随着人们对舒适度要求的不断提高, 减震系统的性能已经成为衡量汽车质量及档次的重要指标之一。
[0003]
现有的汽车减震系统通过悬架与减震器配合对车辆进行减震控制,即在汽车行驶过程中,为抵消减弱路面不平带来的生硬冲击,又能确保车身的横向和纵向稳定性使车辆在悬架设计的自由行程内时刻都可以保持一个较大范围的动态可控姿态。其中悬架可分为被动悬架和主动悬架两大类,其中被动悬架是在出厂前就已经固定好了减震器的阻尼和高度,且减震器的阻尼和高度不可调节;主动悬架则可以根据道路状况实时调节悬架的阻尼和高度,当汽车经过坑洼不平的道路时降低阻尼,调整高度,使汽车平顺,其中的悬架是由弹簧、减震器、导向机构等组成,弹簧主要起减缓冲击力的作用,减振器的主要作用是衰减振动,但是这类采用主动悬架进行减震控制的系统在实际使用过程中还有如下缺陷:
[0004]
1、现有的减震控制系统在汽车经过坑洼不平的道路时, ecu将主动控制减震器变软或变硬,但是这种通过ecu控制减震器阻尼力大小的方式只能控制汽车上的四个车轮上的避震器同时同步进行改变,当左右两处的车轮同时开过高低不同的路段时,四个车轮上的避震器也只能同时变软或同时变硬,不能单独控制,无法实现真正智能减震。
[0005]
2、现有的减震控制系统其减震器是整个控制系统的核心,作用是当车架和车身间震动而出现相对运动时,减震器内的活塞上下移动, 减震器腔内的油液便反复地从一个腔经过不同的孔隙流入另一个腔内,此时孔壁与油液间的摩擦和油液分子间的内摩擦对震动形成阻尼力, 使汽车震动能量转化为油液热能,再由减震器吸收散发到大气中,在油液通道截面和等因素不变时,阻尼力随车架与车桥之间的相对运动速度增减, cdc减震器,是一种“能自动识别道路状况”的新型减震系统,普通的cdc减震器具有内外两个腔室,里面充满液压油。内外腔室的液压油可以通过之间的空隙流动,而当车轮在颠簸时,减震器内的活塞会在套筒内上下移动,腔内的液压油便在活塞的作用力下在内外腔室间流动,由于减震器内的液压油对活塞有阻力,从而实现了减震器的减震作用,而其通过一个外置式电磁阀来控制内外两个腔室连通面积的大小,从而控制减震器减震力的大小,现有技术中的cdc减震器,通过电磁阀来控制液压油流量,但是电磁阀是通过电磁作用带动活塞前后移动的,使得电磁阀在整个减震系统中存在反应不及时,流量控制精度低的缺陷。
[0006]
3、现有的减震控制系统都是在汽车已经行驶到了坑洼处才能检测到路面状况并开始调整阻尼和高度,因此现有减震控制系统存在一定的滞后性,所以车内的驾乘人员不可避免地仍要受到颠簸。
技术实现要素:
[0007]
本实用新型所要解决的技术问题在于针对上述现有技术的不足,
[0008]
提供一种汽车智能减震控制系统,采用该系统的车辆可以对前方路况进行预判处理,同时通过单控主板单独控制单一车轮处的减震器运作,且该减震器通过电机转动代替电磁阀,实现高速响应,精准控制流量,使汽车在不平路面行驶时,减震器能通过驱动电机高速单独控制相应的减震器软硬,实现智能减震效果。
[0009]
为实现上述目的,本实用新型提供了如下技术方案:一种汽车智能减震控制系统,包括信息采集单元、数据分析控制单元以及执行单元, 其特征在于:所述数据分析控制单元包括ecu、adc模块以及pwm模块,所述执行单元包括安装在车轮处的四个独立悬架、设置在独立悬架上的减震器以及装设在减震器上的单控主板,所述信息采集单元包括用于接收车身垂直加速度的车身加速度传感器、用于接收车轮垂直加速度的车轮加速度传感器、用于接收车轮转向角度的转向角度传感器以及设置在减震器内的减震器压力传感器,所述adc模块与ecu、车身加速度传感器、车轮加速度传感器以及转向角度传感器通讯连接,所述pwm模块与ecu和单控主板通讯连接,所述减震器压力传感器与单控主板通讯连接,所述减震器包括设有内、外腔室的减震筒总成以及与内、外腔室导通的液压比例阀,所述单控主板通过液压比例阀从而控制与内、外腔室连通面积的大小。
[0010]
采用上述技术方案,通过信息采集单元实时检测车辆行驶状态,通过数据分析控制单元对信息采集单元收集到的信号进行判定后再输送给执行单元进行减震调节,独立悬架保证车轮能单独起伏,而设置在独立悬架上的单控主板又能一对一控制减震器软硬,具体是指在ecu、车身前方、车身后方均放置车身加速度传感器用以检测车身上方的垂直运动速度,在四个车轮处设置车轮加速度传感器用以检测车轮的垂直运动速度,这些传感器各自独立检测车辆的垂直加速率,并将接受到的加速度信号送至adc(模拟数字转换器)模块转为对应的电压数字信号后再送至ecu进行判定,ecu判定后再通过pwm(脉宽调制)模块,形成脉冲信号送至单控主板处进行调节,进而通过液压比例阀控制与内、外腔室连通面积的大小,转向角度传感器安装在四个车轮上可以检测所有的转向方向,并将信息通过adc模块传输到ecu,转向角度传感器由两组电磁阻滤芯组成,该电磁阻滤芯可以检测到内置在检测齿轮中的电磁的旋转运动,角度转向传感器可以检测到电磁阻内随检测齿轮旋转运动而发生的变化,从而检测方向盘的旋转方向与角度,进而判定车辆过弯状态,再通过单控主板进行各个车轮上的减震器一对一调校,保持最佳过弯状态,实现对车辆在不同路况,不同行驶状态下四个车轮单独减震调控,最大限度提升车辆驾驶感。
[0011]
上述的一种汽车智能减震控制系统,可进一步设置为:所述液压比例阀包括有主阀与侧阀,所述单控主板设置在主阀上,所述侧阀上设有与减震器内腔室导通的交汇孔,所述侧阀靠近主阀的一端设有若干个与减震器外腔室导通的循环孔,所述主阀内装设有驱动电机,所述驱动电机的输出端设有与侧阀同中心线设置且随驱动电机旋转的调节套,所述侧阀对应主阀的一端设有供调节套接入的插槽,所述循环孔与插槽垂直交汇,所述调节套通过插槽与侧阀连接,所述调节套对应交汇孔的一端开设有交汇腔,所述交汇腔内设有多个与循环孔相对应导通的调节孔,所述减震器压力传感器设置在交汇腔与交汇孔之间。
[0012]
采用上述技术方案,每个减震器外均设置一个液压流量控制阀,其主阀外置在减震器上,侧阀部分安装在减震器内,并通过交汇孔与减震器内腔导通,在侧阀设置与减震器
外腔导通的循环孔,使减震器的液压油在活塞的作用力下通过液压流量控制阀在内外腔室间流动,通过驱动电机代替电磁阀,从而解决了电磁阀调节精度不高,对介质洁净度有较高要求,含颗粒状的介质不能适用,如属杂质须先滤去后再使用且相应速度慢的缺陷,通过驱动电机带动调节套高速正反转,从而使调节套的调节孔与循环孔能高效的改变重合面积,进而改变交汇腔与外腔连通处的间隙大小,达到控制液压油流量的目的,驱动电机通过转动调节套进而控制调节孔与循环孔的重合范围,当调节孔与循环孔完全重合时流量最大,实现高速响应,精准控制流量,使汽车在不平路面行驶时,减震器能通过驱动电机高速控制减震器软硬,实现智能减震效果。
[0013]
上述的一种汽车智能减震控制系统,可进一步设置为:所述单控主板上设有第一输送线与第二输送线,所述第一输送线一端与单控主板连接,另一端与减震器压力传感器连接,所述第二输送线一端与单控主板连接,另一端与ecu连接。
[0014]
采用上述技术方案,单控主板直接设置在液压比例阀上,并通过第一输送线及时接受减震器压力传感器的压力信号,并将接受到的信号同第二输送线送至ecu进行判定反馈,每个液压比例阀均设置一个单控主板,从而对单独车轮进行调控,最大限度提升车辆驾驶感。
[0015]
上述的一种汽车智能减震控制系统,可进一步设置为:所述信息采集单元还包括预检测模块,所述数据分析控制单元还包括can模块,所述can模块与预检测模块及ecu通讯连接。
[0016]
采用上述技术方案, 通过预检测模块并接收前方路面的信息,将接收的信息为对应的回波信号,将信号通过can模块(控制器局域网总线)输出至ecu,通过ecu实时地判断前方路面状况, 可以对前方路况进行充分的预判处理,实现对减震器进行自动控制,使得汽车通过前方不平路段时降低车内的震感,提高驾乘舒适性和平稳性。
[0017]
上述的一种汽车智能减震控制系统,可进一步设置为:所述数据分析控制单元与执行单元之间还设有模式控制单元,所述模式控制单元包括舒适模式开关与运动模式开关,舒适模式开关与运动模式开关均与pwm模块以及单控主板分别通讯连接。
[0018]
采用上述技术方案, 通过在数据分析控制单元与执行单元之间设置模式控制单元,使舒适模式开关与运动模式开关位于中央控制台上,驾驶员可根据需要,通过此开关来选择减振器的阻尼力模式。驾驶员可以在舒适和运动两种模式之间进行选择。舒适模式根据驾驶操作性和路而状况控制阻尼力,在强调驾驶舒适性的同时兼顾了适当的操纵灵活性和稳定性,运动模式在阻尼力控制过程中频率地使用高阻尼力范围,以进一步增强操纵灵活性和稳定性,数据分析控制单元内所输出的所有数据都先通过模式控制单元判定模式后再输出相应调节信号,使驾驶员能随需要进行减震控制。
[0019]
上述的一种汽车智能减震控制系统,可进一步设置为:所述循环孔等均环绕分布在侧阀上,所述调节孔对应循环孔等均环绕分布在调节套上,当其中一个调节孔与循环孔完全重合时,其与调节孔与循环孔均一一重合。
[0020]
采用上述技术方案, 在侧阀出设置多个循环孔,在调节套上设置多个调节孔,循环孔与调节孔一一对应,调节套根据单控主板接受到的脉冲信号转动,从而使循环孔与调节孔能不断的交错分离,进而控制液压油流量。
[0021]
上述的一种汽车智能减震控制系统,可进一步设置为:所述驱动电机为伺服电机
或直线电机。
[0022]
采用上述技术方案,直线电机的优点首先在于直线运动机构中,,消除了机械背隙、响应更快,精度更高,伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象,闭环控制。
[0023]
上述的一种汽车智能减震控制系统,可进一步设置为:所述预检测模块包括超声波信号传感器,所述超声波信号传感器设置在车轮前方的车头上,用于按照设定角度激励超声波,并将接收的回波信号通过can模块输送至ecu。
[0024]
采用上述技术方案,将超声波信号传感器安装在汽车车体内前轮前方,并激励超声波在前方发出扇形超声波信号,再反馈给can模块,计算汽车行驶方向上车轮前方凹陷的深度或者坡地的高度,再根据前方凹陷的深度或者坡地的高度以及车轮到达前方洼地或者坡地所需的时间,生成回波信号送至ecu,ecu对前方路况进行判定响,通过放大响应时刻反求当量阻尼,然后发出数字化的阻尼调节指令,通过pwm模块导出电子脉冲信号,当量阻尼进一步计算比例阀的具体调节量,最后,将比例阀的具体调节量传输给单控主板进行智能减震调节,通过调节比例阀的流量调节液压减振器的阻尼,从而起到减振、缓冲的作用。
[0025]
上述的一种汽车智能减震控制系统,可进一步设置为:所述预检测模块包括光学照相机,所述光学照相机设置在车轮前方的车头上,用于对车头前方拍摄的图像识别,并将接收的图像识别通过can模块建立预检测信号模型再输送至ecu。
[0026]
采用上述技术方案,将光学照相机安装在汽车车体内前轮前方,采集汽车前方信息,通过can模块进行图像识别建立输入信号模型,采用ecu算法对前方路况进行判定响,通过放大响应时刻反求当量阻尼,然后发出数字化的阻尼调节指令,通过pwm模块导出电子脉冲信号,当量阻尼进一步计算比例阀的具体调节量,最后,将比例阀的具体调节量传输给单控主板进行智能减震调节,通过调节比例阀的流量调节液压减振器的阻尼,从而起到减振、缓冲的作用。
[0027]
下面结合附图和实施例对本实用新型作进一步详细说明。
附图说明
[0028]
图1为本实用新型实施例的智能减震控制系统的原理框图。
[0029]
图2为本实用新型实施例的单控主板结合液压比例阀的原理框图。
[0030]
图3为本实用新型实施例液压比例阀的立体结构示意图。
[0031]
图4为图3的爆炸图。
[0032]
图5为本实用新型实施例液压比例阀的剖视图1。
[0033]
图6为本实用新型实施例液压比例阀的剖视图2。
[0034]
图7为本实用新型实施例采用超声波信号传感器进行预检测的流程图。
[0035]
图8为本实用新型实施例采用光学照相机进行预检测的流程图的流程图。
具体实施方式
[0036]
如图1-图6所示,一种汽车智能减震控制系统,包括信息采集单元1、数据分析控制单元2以及执行单元3,所述数据分析控制单元2包括ecu21、adc模块22以及pwm模块23,所述执行单元3包括安装在车轮处的四个独立悬架、设置在独立悬架上的减震器以及装设在减
震器上的单控主板31,所述信息采集单元1包括用于接收车身垂直加速度的车身加速度传感器11、用于接收车轮垂直加速度的车轮加速度传感器12、用于接收车轮转向角度的转向角度传感器13以及设置在减震器内的减震器压力传感器14,所述adc模块22与ecu21、车身加速度传感器11、车轮加速度传感器12以及转向角度传感器13通讯连接,所述pwm模块23与ecu21和单控主板31通讯连接,所述减震器压力传感器14与单控主板31通讯连接,所述减震器包括设有内、外腔室的减震筒总成以及与内、外腔室导通的液压比例阀5,所述单控主板31通过液压比例阀5从而控制与内、外腔室连通面积的大小,所述液压比例阀5包括有主阀51与侧阀52,所述单控主板31设置在主阀51上,所述侧阀52上设有与减震器内腔室导通的交汇孔521,所述侧阀52靠近主阀51的一端设有若干个与减震器外腔室导通的循环孔522,所述主阀51内装设有驱动电机511,所述驱动电机511的输出端设有与侧阀52同中心线设置且随驱动电机511旋转的调节套512,所述侧阀52对应主阀51的一端设有供调节套512接入的插槽523,所述循环孔522与插槽523垂直交汇,所述调节套512通过插槽523与侧阀52连接,所述调节套512对应交汇孔521的一端开设有交汇腔5121,所述交汇腔5121内设有多个与循环孔522相对应导通的调节孔5122,所述减震器压力传感器14设置在交汇腔5121与交汇孔521之间,所述单控主板31上设有第一输送线311与第二输送线312,所述第一输送线311一端与单控主板31连接,另一端与减震器压力传感器14连接,所述第二输送线312一端与单控主板31连接,另一端与ecu21连接,所述信息采集单元1还包括预检测模块10,所述数据分析控制单元2还包括can模块24,所述can模块24与预检测模块10及ecu21通讯连接,所述数据分析控制单元2与执行单元3之间还设有模式控制单元4,所述模式控制单元4包括舒适模式开关41与运动模式开关42,舒适模式开关41与运动模式开关42均与pwm模块23以及单控主板31分别通讯连接,所述循环孔522等均环绕分布在侧阀52上,所述调节孔5122对应循环孔522等均环绕分布在调节套512上,当其中一个调节孔5122与循环孔522完全重合时,其与调节孔5122与循环孔522均一一重合,所述驱动电机511为伺服电机或直线电机。
[0037]
如图7所示,所述预检测模块10包括超声波信号传感器101,所述超声波信号传感器101设置在车轮前方的车头上,用于按照设定角度激励超声波,并将接收的回波信号通过can模块24输送至ecu21,具体是指ecu控制超声波信号传感器101按照设定角度激励超声波,并通过can模块接收超声波信号传感器101反馈的回拨信号,ecu再通过判断此时车速与到达反馈点时间,通过pwm模块生成电子脉冲信号再送至单控主板处,对单独车轮进行阻尼力调节。
[0038]
如图8所示,所述预检测模块10包括光学照相机102,所述光学照相机102设置在车轮前方的车头上,用于对车头前方拍摄的图像识别,并将接收的图像识别通过can模块24建立预检测信号模型再输送至ecu21,具体是指ecu控制光学照相机102按照设定拍照间隔,并通过can模块接收超光学照相机102反馈的图像信息,ecu再通过判断此时车速与到达反馈点时间,通过pwm模块生成电子脉冲信号再送至单控主板处,对单独车轮进行阻尼力调节。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips