
 商标分类
商标分类  商标转让
商标转让 
车辆控制装置、车辆控制方法以及车辆控制系统与流程
 2021-02-03 15:02:45|
2021-02-03 15:02:45| 270|
270| 起点商标网
起点商标网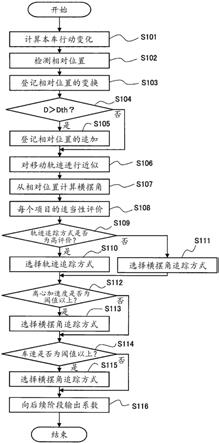
[0001]
本发明涉及车辆控制装置、车辆控制方法以及车辆控制系统。
背景技术:
[0002]
在专利文献1中公开了一种转向辅助控制装置,该转向辅助控制装置计算本车辆前方的追踪对象相对于本车辆的相对位置作为对象位置,在时间轴上多次获取计算出的对象位置并存储在缓冲存储器中,并且根据基于在缓冲存储器中存储的多个对象位置推测出的追踪对象的移动轨迹来计算关于转向的控制目标值,该转向辅助控制装置以在针对位于比当前的本车辆位置靠后方的追踪对象所计算出的对象位置被存储在缓冲存储器中的状态下推测移动轨迹的方式,基于本车辆与追踪对象之间的间隔距离及本车辆车速来调整对象位置的获取周期。
[0003]
专利文献
[0004]
专利文献1:日本特开2017-065473号公报
技术实现要素:
[0005]
发明所要解决的课题
[0006]
但是,在以使本车辆追踪先行车辆的方式计算与转向相关的目标值的追踪转向控制中,在利用搭载于本车辆的照相机对前方的先行车辆进行拍摄的情况下,如果本车辆与先行车辆的车间距离短,则无法利用照相机对先行车辆的整体进行拍摄,从而在先行车辆的横向位置的检测值中产生误差,由于该误差而容易产生指令舵角的变动。
[0007]
另一方面,在本车辆与先行车辆的车间距离长的情况下,存在如下情况:在移动轨迹的计算中使用的横摆率检测值的误差进行累积而移动轨迹的计算变得不正确,成为指令舵角的变动的主要因素。
[0008]
本发明的目的在于提供一种车辆控制装置、车辆控制方法以及车辆控制系统,能够抑制与追踪转向控制中的转向相关的指令的变动。
[0009]
用于解决问题的方案
[0010]
根据本发明的一个实施方式,在其一方式中,基于与在车辆的前方行驶的先行车辆所行驶的道路曲率相关的信息、和与所述车辆和所述先行车辆之间的相对位置相关的信息,求出使用一次轨迹使所述车辆对所述先行车辆进行追踪的一次追踪控制、和使用二次轨迹使所述车辆对所述先行车辆进行追踪的二次追踪控制的分配,并将用于实现求出的所述一次追踪控制以及所述二次追踪控制的与所述车辆的转向相关的指令向与所述车辆的转向相关的转向致动器部输出。
[0011]
根据本发明的一个实施方式,能够抑制与追踪转向控制中的转向相关的指令的变动,提高追踪转向控制的性能。
附图说明
[0012]
图1是表示车辆控制系统的框图。
[0013]
图2是表示追踪转向控制的步骤的流程图。
[0014]
图3是用于说明本车辆的旋转平移变化量的线图。
[0015]
图4是表示轨迹追踪方式以及横摆角追踪方式的评价模式的图。
[0016]
图5是表示追踪转向控制的步骤的流程图。
[0017]
图6是表示横摆角追踪方式的评价分的修正值与离心加速度之间的相关性的线图。
[0018]
图7是表示横摆角追踪方式的评价分的修正值与车速之间的相关性的线图。
具体实施方式
[0019]
以下,基于附图对本发明的车辆控制装置、车辆控制方法以及车辆控制系统的实施方式进行说明。
[0020]
图1是表示本发明的实施方式的车辆控制系统的一个方式的构成框图。
[0021]
图1的车辆控制系统10是具有使车辆(本车辆)1追踪前方的先行车辆的追踪转向控制的功能的驾驶辅助系统。
[0022]
车辆控制系统10具备驾驶辅助控制装置20、行驶控制装置30、转向控制装置40、外界识别装置50。
[0023]
驾驶辅助控制装置20、行驶控制装置30以及转向控制装置40是具备微型计算机的电子控制装置,构成车辆控制系统10的控制器,其中,该微型计算机具有mpu(microprocessor unit,微处理单元)、rom(read only memory,只读存储器)、ram(random access memory,随机存取存储器)等。
[0024]
外界识别装置50是使用照相机、毫米波雷达、激光雷达等外界检测设备来识别车辆1的外部环境的外界识别部。
[0025]
外界识别装置50例如通过对由立体照相机拍摄的对象物的左右一对图像进行图像匹配处理,计算左右一对图像间的对应位置的像素偏移量、即视差,生成各点根据与视差对应的亮度等表示距离信息的分布的距离图像。
[0026]
然后,外界识别装置50将距离图像上的各点变换为以车长方向即距离方向为x轴、车宽方向即左右方向为y轴、车高方向为z轴的三维实际空间的坐标。
[0027]
由此,外界识别装置50识别车辆1行驶的道路的划分线(车道中央线或车道外侧线等)、障碍物、在车辆1的前方行驶的先行车辆等拍摄对象物与车辆1之间的相对位置关系。
[0028]
在此,外界识别装置50在识别先行车辆与车辆1之间的相对位置关系的识别处理中,将距离图像中的先行车辆的背面上的特定的点变换为以车辆1为原点的xy坐标,将变换后的xy坐标值作为先行车辆相对于车辆1的相对位置信息。
[0029]
需要说明的是,外界识别装置50将先行车辆的背面上的特定的点例如设为先行车辆的背面上的车宽方向的中心位置。另外,外界识别装置50将xy坐标的原点设为例如车辆1的中心点、即车辆1的车宽方向上的中心线与车辆1的车长方向上的中心线重叠的点。
[0030]
然后,外界识别装置50将与先行车辆等和车辆1之间的相对位置关系相关的信息输出到驾驶辅助控制装置20。
[0031]
另外,车辆1具备检测车辆1的车速(行驶速度)v(m/s)的车速传感器60、检测车辆1的横摆率γ(rad/s)的横摆率传感器70、检测能够自主转向的转向装置即电动动力转向装置90的舵角θs(deg)的舵角传感器80。
[0032]
而且,驾驶辅助控制装置20输入与外界识别装置50获取到的相对位置关系相关的信息、与车速传感器60检测出的车速v相关的信息、与横摆率传感器70检测出的横摆率γ相关的信息、以及与舵角传感器80检测出的舵角θs相关的信息。
[0033]
驾驶辅助控制装置20作为软件而具备相对位置检测部21、移动轨迹计算部22、曲率计算部23、横摆角计算部24、横向位置计算部25等功能。而且,驾驶辅助控制装置20计算与目标转向角的设定相关的控制参数,并将与该控制参数对应的指示信号、即与转向相关的指令输出到行驶控制装置30。
[0034]
行驶控制装置30能够与驾驶辅助控制装置20相互通信,接收与来自驾驶辅助控制装置20的控制参数对应的指示信号。而且。行驶控制装置30基于与控制参数对应的指示信号求出目标转向角,将与目标转向角相关的指令作为与转向相关的指令输出到转向控制装置40。
[0035]
转向控制装置40基于输入的与目标转向角相关的指令,控制电动动力转向装置90、即作为转向致动器的电动马达。
[0036]
在此,驾驶辅助控制装置20具有通过两种不同的控制方式来实施使车辆1追踪前方的先行车辆的追踪转向控制的功能。而且,驾驶辅助控制装置20切换或分配两种控制方式,求出与目标转向角的设定相关的控制参数,并将与求出的控制参数相关的信息输出到行驶控制装置30。
[0037]
上述两种不同的控制方式中的一种是以下方式:利用二次函数对先行车辆的移动轨迹进行近似,求出近似式的系数即曲率成分、横摆角成分以及横向位置作为控制参数(第一控制参数),即,是进行使用二次轨迹使车辆1对先行车辆进行追踪的二次追踪控制的轨迹追踪方式。
[0038]
另外,上述两种不同的控制方式中的另一种是以下方式:利用一次函数对从车辆1到先行车辆的移动轨迹进行近似,求出近似式的系数即横摆角成分作为控制参数(第二控制参数),即,是进行使用一次轨迹使车辆1对先行车辆进行追踪的一次追踪控制的横摆角追踪方式(最短追踪控制方式)。
[0039]
在利用二次函数对先行车辆的移动轨迹进行近似的情况下,二次函数中的二次系数表示移动轨迹的曲率成分,一次系数表示移动轨迹的横摆角成分(相对于本车辆的、移动轨迹的倾斜成分),零次系数表示相对于车辆1的移动轨迹的横向位置成分。
[0040]
而且,在轨迹追踪方式中,将这些零次到二次的各系数输出到行驶控制装置30,行驶控制装置30以使车辆1沿着由二次函数表示的目标轨迹行驶的方式求出目标转向角。即,轨迹追踪方式是使用二次轨迹使车辆1对先行车辆进行追踪的方式。
[0041]
另一方面,在横摆角追踪方式中,是如下方式:以使车辆1沿着由将横摆角设为一次系数的一次函数表示的目标轨迹行驶的方式求出目标转向角,是使用一次轨迹使车辆1对先行车辆进行追踪的方式。
[0042]
图2的流程图表示由驾驶辅助控制装置20进行的追踪转向控制(轨迹追踪方式、横摆角追踪方式的切换控制)的一个方式。
[0043]
需要说明的是,图2的流程图所示的程序通过每隔一定时间(例如50ms)的中断处理来执行。
[0044]
驾驶辅助控制装置20在步骤s101(在图中简记为“s101”。以下相同。)中,计算每个运算周期ts(s)的车辆1的行动变化。
[0045]
具体而言,驾驶辅助控制装置20读入由车速传感器60检测出的车速v和由横摆率传感器70检测出的横摆率γ,计算车辆1的旋转平移变化量。
[0046]
需要说明的是,驾驶辅助控制装置20能够代替从横摆率传感器70获取与横摆率γ有关的信息,而使用舵角θ的检测值、车速v的检测值、以及车辆1的轴距、稳定因素来计算横摆率γ。
[0047]
图3表示每个运算周期ts(s)、即从一个运算周期前到当前为止的车辆1的旋转平移变化量。
[0048]
如图3所示,如果将车辆1的旋转变化量设为δθ(rad)、车辆1的车长方向的平移变化量设为δx(m)、车辆1的车宽方向的平移变化量设为δy(m),则δθ、δx以及δy可以用以下的算式1表示。
[0049]
[式1]
[0050]
δθ=γ*ts
[0051]
δx=v*ts*cos(δθ)
[0052]
δy=v*ts*sin(δθ)
[0053]
在步骤s102(相对位置检测部21)中,驾驶辅助控制装置20基于来自外界识别装置50的相对位置关系的信息,检测先行车辆相对于当前的车辆1的相对位置。
[0054]
需要说明的是,如图3所示,假定先行车辆1相对于当前的车辆1的相对位置由xy坐标表示,其中xnow是前后位置,ynow是横向位置,且原点是当前的车辆1的位置。
[0055]
驾驶辅助控制装置20将在步骤s102中检测出的先行车辆相对于车辆1的相对位置依次存储在ram等内置存储器中。由此,相对位置的检测结果成为登记相对位置。
[0056]
在步骤s103中,驾驶辅助控制装置20为了推测先行车辆的移动轨迹,根据在步骤s101中计算出的旋转平移变化量,将存储在存储器中的时间序列的相对位置数据即相对位置历史的所有登记相对位置变换为以当前的车辆1的位置为原点的xy坐标并改写。
[0057]
如果将相对位置历史中的登记相对位置的前后位置以及横向位置分别设为x、y,则坐标变换后的登记相对位置x
’
、y
’
由以下的算式2表示。
[0058]
[式2]
[0059]
y
′
[n]=(y[n]-δy)*cos(-δθ)+(x[n]-δx)*sin(-δθ)
[0060]
x
′
[n]=-(y[n]-δy)*sin(-δθ)+(x[n]-δx)*cos(-δθ)
[0061]
在此,x[n]以及y[n]表示存储了之前n次的先行车辆的前后位置以及左右位置。
[0062]
例如,在图3中,相对位置历史中最新的登记相对位置x[0]、y[0]由以从当前起运算周期ts前的车辆1的位置为原点的xy坐标表示。因此,相对位置历史中最新的登记相对位置x[0]、y[0]按照算式2,变换为以当前的车辆1的位置为原点的xy坐标上的位置。
[0063]
在步骤s104中,驾驶辅助控制装置20判定在步骤s102中检测出的相对位置(xnow,ynow)与在步骤s103中对登记相对位置进行坐标变换后的相对位置历史中最新的登记相对位置(x[0],y[0])之间的距离d(>0),相对于阈值dth(>0)是否满足以下的算式3。
[0064]
[式3]
[0065][0066]
即,在先行车辆相对于车辆1的相对位置几乎没有变化的情况下,即使将本次新检测出的相对位置(xnow,ynow)追加到相对位置历史中,对先行车辆的移动轨迹进行近似的二次函数也几乎没有变化。
[0067]
因此,在距离d为阈值dth以下的情况下,使本次新检测出的相对位置(xnow,ynow)存储在存储器中会白白地消耗存储器容量。
[0068]
因此,驾驶辅助控制装置20基于距离d与阈值dth的比较结果,对将本次新检测出的相对位置(xnow,ynow)的数据是存储在存储器中还是废弃进行切换。在此,与对先行车辆的位置进行存储的间隔相当的阈值dth是与对登记相对位置进行存储的存储器的容量或处理器的处理能力等对应的值。
[0069]
在距离d大于阈值dth的情况下(d>dth),驾驶辅助控制装置20从步骤s104进入步骤s105,实施将本次新检测出的相对位置(xnow,ynow)的数据追加到相对位置历史中并存储的处理。
[0070]
另一方面,在距离d为阈值dth以下的情况下(d≤dth),驾驶辅助控制装置20从步骤s104绕过步骤s105而进入步骤s106,不实施将本次新检测出的相对位置(xnow,ynow)的数据追加到相对位置历史中的处理。即,在距离d为阈值dth以下的情况下,驾驶辅助控制装置20不保存而是废弃本次新检测出的相对位置(xnow,ynow)的数据。
[0071]
在步骤s105中,驾驶辅助控制装置20将在步骤s102中检测出的相对位置(xnow,ynow)的数据存储在ram等存储器中,作为新的登记相对位置追加到相对位置历史中。
[0072]
具体而言,驾驶辅助控制装置20按照以下的算式4改写相对位置历史中最新的登记相对位置(x[0],y[0]),将在本次步骤s102中新检测出的相对位置(xnow,ynow)设为最新的登记相对位置(x[0],y[0])。
[0073]
[式4]
[0074]
x[0]=xnow
[0075]
y[0]=ynow
[0076]
然后,驾驶辅助控制装置20通过按照以下的算式5改写相对位置历史的剩余的登记相对位置(x[i],y[i]:i>0),将到此为止的登记相对位置(x[i],y[i])分别更新存储为一次之前的数据。
[0077]
需要说明的是,算式5的左边表示改写后的登记相对位置,算式5的右边表示改写前的登记相对位置。
[0078]
[式5]
[0079]
x[i+1]=x[i]
[0080]
y[i+1]=y[i]
[0081]
在此,驾驶辅助控制装置20的存储器具有对登记相对位置(x[i],y[i])的i直到成为最大值imax(正整数)为止的数量的登记相对位置进行存储的容量。
[0082]
因此,当改写前的相对位置历史中最旧的登记相对位置(xold,yold)是(x[imax],y[imax])时,废弃改写前的登记相对位置(xold,yold)的数据。
[0083]
需要说明的是,驾驶辅助控制装置20在外界识别装置50不能识别例如车辆1的前
方的成为追踪对象的先行车辆的情况等、不能实施追踪转向控制的条件的情况下,将存储器中存储的登记相对位置的数据全部删除。
[0084]
驾驶辅助控制装置20在步骤s106(移动轨迹计算部22)中,利用使用了多个登记相对位置(x[i],y[i])的数据的最小二乘法,计算对先行车辆的移动轨迹进行近似的二次函数y=f(x)。
[0085]
在此,二次函数y=f(x)通过二次系数a、一次系数b、零次系数c由以下算式6表示。
[0086]
[式6]
[0087]
y=f(x)=a*x2+b*x+c
[0088]
然后,驾驶辅助控制装置20从对先行车辆的移动轨迹进行近似的二次函数y=f(x)计算出当前的车辆1的前后位置即x=0时的先行车辆的移动轨迹的曲率(1/r),作为曲率成分的控制参数(二次系数)(曲率计算部23)。
[0089]
x=0时的移动轨迹的曲率(1/r)如以下的算式7所示,使用将二次函数y=f(x)关于x进行二阶微分以及一阶微分后的导数而得到。
[0090]
[式7]
[0091]
1/r=f
″
(0)/(1+f
′
(0)2)
3/2
=2*a/(1+b2)
3/2
[0092]
在算式7中,一次系数b是接近零的值,因此曲率(1/r)能够根据1/r=2
×
a的式子计算出,驾驶辅助控制装置20确定二次系数a作为曲率成分的控制参数并存储在存储器中。
[0093]
另外,驾驶辅助控制装置20从对先行车辆移动轨迹进行近似的二次函数y=f(x)计算出当前的车辆1的前后位置即x=0时的移动轨迹的横摆角φ,作为横摆角成分的控制参数(一次系数)(横摆角计算部24)。
[0094]
x=0时的移动轨迹的横摆角φ如以下算式8所示,根据将二次函数y=f(x)关于x进行一阶微分后的导数而得到,因此,驾驶辅助控制装置20确定一次系数b作为横摆角成分的控制参数并存储在存储器中。
[0095]
[式8]
[0096][0097]
进一步地,驾驶辅助控制装置20从对先行车辆移动轨迹进行近似的二次函数y=f(x)计算出当前的车辆1的前后位置即x=0时的移动轨迹的横向位置yx=0,作为横向位置成分的控制参数(零次系数)(横向位置计算部25)。
[0098]
x=0时的移动轨迹的横向位置yx=0如以下算式9所示,成为零次系数c,因此驾驶辅助控制装置20确定零次系数c作为横向位置成分的控制参数并存储在存储器中。
[0099]
[式9]
[0100]
y
x=0
=f(0)=c
[0101]
轨迹追踪方式是指,基于根据对先行车辆的移动轨迹进行近似的二次函数y=f(x)如上述那样所求出的曲率成分、横摆角成分以及横向位置成分这三个控制参数,设定电动动力转向装置90的目标转向角。
[0102]
即,驾驶辅助控制装置20在以轨迹追踪方式进行追踪转向控制的情况下,用二次函数y=f(x)对先行车辆的移动轨迹进行近似,将其作为车辆1的目标轨迹,控制转向角以使车辆1沿着该目标轨迹移动。
[0103]
需要说明的是,驾驶辅助控制装置20可以将计算对先行车辆的移动轨迹进行近似的二次函数y=f(x)时使用的登记相对位置(x[i],y[i])的范围,在求出二次系数a时设为从最新值起最短的范围,在求出零次系数c时设为从最新值起最长的范围,在求出一次系数b时设为求出二次系数a时以上且求出零次系数c时以下的范围。
[0104]
由此,在针对每个范围计算出的近似式的近似曲线中,容易反映先行车辆的实际的移动轨迹中的横向位置、横摆角、曲率的信息,能够提高移动轨迹的推测中的精度及响应性的并存性。
[0105]
在步骤s107中,驾驶辅助控制装置20基于先行车辆的前后位置xnow以及横向位置ynow求出与横摆角相当的系数(一次系数)。
[0106]
在步骤s107中求出的与横摆角相当的一次系数是在横摆角追踪方式中使用的控制参数,在横摆角追踪方式中,不使用曲率成分以及横向位置成分,因此如以下的算式10所示,将曲率成分以及横向位置成分分别设为零。
[0107]
[式10]
[0108]
1/r=f
″
(0)=0
[0109][0110]
y
x=0
=f(0)=0
[0111]
横摆角追踪方式是指,仅将基于先行车辆相对于当前的车辆1的相对位置即前后位置xnow以及横向位置ynow求出的横摆角成分作为控制参数,设定电动动力转向装置90的目标转向角。
[0112]
即,在横摆角追踪方式中,利用将一次系数设为横摆角φ的一次函数(y=φx)来特性目标轨迹,控制转向角以使车辆1沿着该目标轨迹移动。
[0113]
如上所述,驾驶辅助控制装置20求出作为轨迹追踪方式中的三个控制参数的曲率成分、横摆角成分、横向位置成分,还求出作为横摆角追踪方式中的一个控制参数的横摆角成分。
[0114]
接着,驾驶辅助控制装置20实施轨迹追踪方式、横摆角追踪方式的切换。
[0115]
在步骤s108中,驾驶辅助控制设备20基于道路和先行车辆的状况等条件,对轨迹追踪方式、横摆角追踪方式分别进行适当程度的评价。
[0116]
在轨迹追踪方式的情况下,如果车间距离较远,则横摆率传感器的误差累积,指令舵角变动,如果车间距离较短,则错误检测先行车辆的横向位置,指令舵角变动。另一方面,在横摆角追踪方式的情况下,由于以通过最短距离追踪先行车辆的方式进行控制,因此在转弯中车辆1的行驶路线有可能走捷径。
[0117]
因此,驾驶辅助控制装置20为了能够弥补各控制方式的缺点,在当时的条件下选择更适当的控制方式,并根据在所选择的控制方式中求出的控制参数来控制舵角。
[0118]
图4表示各控制方式的评价模式的一个方式。
[0119]
在图4中,作为评价条件,使用道路曲率、与先行车辆的距离(车间距离)、以及先行车辆相对于车辆1的横向偏离量,针对每个评价条件将各控制方式的适当程度评价为“高”、“中”、“低”这三个等级。
[0120]
需要说明的是,如后所述,比较各控制方式的适当程度来切换控制方式,因此适当
程度的“高”、“中”、“低”的三个等级评价相当于各控制方式的加权,适当程度越高则加权越大。
[0121]
关于道路曲率的条件,驾驶辅助控制装置20将行驶路大致分为直线(曲率小)和转弯(曲率大)。
[0122]
如上所述,在横摆角追踪方式中,转弯的曲率越大(越是急转弯时),行驶路线走捷径(内绕)的可能性越高,在转弯中采用横摆角追踪方式是不优选的。
[0123]
因此,驾驶辅助控制装置20基于走捷径的可能性,将转弯中横摆角追踪方式的适当程度评价为“低”。
[0124]
另外,由于轨迹追踪方式在直线路中的控制响应延迟,因此在直线路中轨迹追踪方式的适当程度被评价为“中”。
[0125]
进一步地,由于能够抑制走捷径,因此驾驶辅助控制装置20将转弯中的轨迹追踪方式的适当程度评价为“高”,基于高响应性,驾驶辅助控制装置20将直线路中的横摆角追踪方式的适当程度评价为“高”。
[0126]
另外,驾驶辅助控制装置20将车间距离的条件大致分为附近、中等、远方。
[0127]
在为轨迹追踪方式的情况下,如果车间距离为附近,则无法利用照相机拍摄先行车辆的整体,从而产生先行车辆的横向位置的检测误差,由于该误差而容易产生指令舵角的变动。另外,在为轨迹追踪方式的情况下,如果车间距离为远方,则在移动轨迹的计算中使用的横摆率检测值的误差累积,成为指令舵角的变动的主要因素。
[0128]
因此,驾驶辅助控制装置20将车间距离为附近时以及为远方时的轨迹追踪方式的适当程度评价为“低”,将车间距离为中等时的轨迹追踪方式的适当程度评价为“高”。
[0129]
另一方面,对于横摆角追踪方式,即使车间距离为附近而产生先行车辆的横向位置的检测误差,影响也比较小,另外,车间距离为远方时没有传感器误差的累积。
[0130]
因此,驾驶辅助控制装置20将车间距离为附近时以及为远方时的横摆角追踪方式的适当程度评价为“中”,将车间距离为中等时的横摆角追踪方式的适当程度评价为“高”。
[0131]
进一步地,驾驶辅助控制装置20将先行车辆相对于车辆1的横向偏离量的条件大致分为横向偏离量小和横向偏离量大。
[0132]
横摆角追踪方式相对于先行车辆的横向偏离响应快,但如果横向偏离量大,则有可能产生行驶路线的走捷径。与此相对,在轨迹追踪方式中,即使在横向偏离量大的情况下也能够抑制走捷径,但具有对先行车辆的横向偏离响应慢的特性。
[0133]
因此,驾驶辅助控制装置20在横向偏离量大时,将横摆角追踪方式的适当程度评价为“中”,在横向偏离量小时,将横摆角追踪方式的适当程度评价为“高”。
[0134]
另外,驾驶辅助控制装置20在横向偏离量大时,将轨迹追踪方式的适当程度评价为“高”,在横向偏离量小时,将轨迹追踪方式的适当程度评价为“中”。
[0135]
在步骤s109中,驾驶辅助控制装置20判断在道路曲率、与先行车辆的距离(车间距离)、以及先行车辆的横向偏离量的各项目中得到更多“高”评价的控制方式是轨迹追踪方式和横摆角追踪方式中的哪一个。
[0136]
需要说明的是,驾驶辅助控制装置20例如将“高”的评价设为5分,将“中”的评价设为3分,将“低”的评价设为1分,能够在步骤s109中判断在各项目中得到的评价分的合计值高的一方的控制方式。
[0137]
然后,在轨迹追踪方式的“高”评价的次数比横摆角追踪方式的“高”评价的次数多的情况下(轨迹追踪方式的评价分的合计比横摆角追踪方式的评价分的合计大的情况下),驾驶辅助控制装置20进入步骤s110。
[0138]
在步骤s110中,驾驶辅助控制设备20选择轨迹追踪方式作为追踪转向控制的方式,并将在轨迹追踪方式中求出的曲率成分(二次系数)、横摆角成分(一次系数)和横向位置成分(零次系数)设为输出到后续阶段的行驶控制设备30的控制参数。
[0139]
另一方面,在横摆角追踪方式的“高”评价的次数比轨迹追踪方式的“高”评价的次数多的情况下(横摆角追踪方式的评价分的合计比轨迹追踪方式的评价分的合计大的情况下),驾驶辅助控制装置20进入步骤s111。
[0140]
在步骤s1101中,驾驶辅助控制设备20选择横摆追踪方式作为追踪转向控制的方式,并将在横摆追踪方式中求出的横摆角成分(一次系数)设为输出到后续阶段的行驶控制设备30的控制参数,将曲率成分(二次系数)以及横向位置成分(零次系数)设为零。
[0141]
需要说明的是,在“高”评价的次数为相同次数的情况下(或者评价分的合计为相同分的情况下),驾驶辅助控制装置20能够从轨迹追踪方式和横摆角追踪方式中选择预先确定的控制方式(例如轨迹追踪方式)作为标准控制方式。
[0142]
上述步骤s110、步骤s111中的控制方式的选择是临时的选择,驾驶辅助控制装置20在步骤s112以后,基于离心加速度以及车速的条件决定最终控制方式。
[0143]
在步骤s112中,驾驶辅助控制装置20在通过轨迹追踪方式进行了追踪转向控制情况下,判断是否发生了规定以上的追踪延迟。
[0144]
在此,驾驶辅助控制装置20从曲率半径r以及车速v运算追踪先行车辆时的离心加速度,在运算出的离心加速度为阈值acth(acth>0)以上时,判断为发生规定以上的追踪延迟。
[0145]
即,驾驶辅助控制装置20在满足以下算式11的条件时,判断为在轨迹追踪方式下的追踪转向控制中发生了规定以上的响应延迟。
[0146]
需要说明的是,在算式11中,abs(α)是将变量α的绝对值返回的函数,阈值acth例如是1.5m/s2左右的值。
[0147]
[式11]
[0148]
abs(离心加速度)=abs(v*v/r)≥acth
[0149]
当离心加速度为阈值acth以上时,驾驶辅助控制装置20进入步骤s113,选择在横摆角追踪方式中得到的横摆角成分(一次系数)作为输出到后续阶段的行驶控制装置30的控制参数。
[0150]
即,即使在步骤s110中选择了轨迹追踪方式的情况下,如果预测为在轨迹追踪方式中发生了规定以上的响应延迟,则驾驶辅助控制装置20切换为响应比轨迹追踪方式快的横摆角追踪方式。
[0151]
另一方面,当离心加速度小于阈值acth时,驾驶辅助控制装置20绕过步骤s113而进入步骤s114。
[0152]
即,在离心加速度小于阈值acth的情况下,即使是轨迹追踪方式,也是能够以足够的响应速度进行追踪转向控制的条件,因此驾驶辅助控制装置20保持步骤s110或步骤s111中选择的控制方式。
[0153]
在步骤s114中,驾驶辅助控制装置20判断车速v是否为阈值vth以上。
[0154]
在此,车速v为阈值vth以上的状态是指对追踪转向控制要求高响应性的状态。
[0155]
因此,在车速v为阈值vth以上的情况下,驾驶辅助控制装置20进入步骤s115,选择在横摆角追踪方式中得到的横摆角成分(一次系数)作为输出到后续阶段的行驶控制装置30的控制参数。
[0156]
即,即使在步骤s110中选择了轨迹追踪方式的情况下,即使离心加速度小于阈值acth但如果车速v为阈值vth以上,则驾驶辅助控制装置20为了抑制追踪转向控制的响应性降低而切换为横摆角追踪方式。
[0157]
另一方面,在车速v小于阈值vth时,即使是轨迹追踪方式,也能够以足够的响应性进行追踪转向控制,因此,驾驶辅助控制装置20通过绕过步骤s115,保持此前选择的控制方式。
[0158]
因此,在步骤s110中选择了轨迹追踪方式的情况下,当离心加速度小于阈值acth且车速v小于阈值vth时,驾驶辅助控制装置20最终选择轨迹追踪方式作为追踪转向控制的控制方式,在步骤s111中选择了横摆角追踪方式的情况下,不管离心加速度以及车速v的条件如何,最终选择横摆角追踪方式作为追踪转向控制的控制方式。
[0159]
需要说明的是,驾驶辅助控制装置20可以首先基于离心加速度、车速v的条件判断是否应选择横摆角追踪方式,当离心加速度以及车速v均小于阈值时,根据图4的评价模式选择轨迹追踪方式和横摆角追踪方式中的某一方。
[0160]
另外,驾驶辅助控制装置20对于离心加速度以及车速v条件也进行适当程度的设定(评价分的赋予),通过结合基于曲率、车间距离、横向偏离的适当程度的综合评价,能够选择轨迹追踪方式和横摆角追踪方式中的某一方。
[0161]
如上所述,轨迹追踪方式具有如下特性:如果车间距离短,则产生先行车辆的横向位置的检测误差,产生指令舵角的变动,另外,如果车间距离长,则用于计算移动轨迹的横摆率检测值的误差累积,成为指令舵角的变动主要因素,另外,横摆角追踪方式虽然响应性比轨迹追踪方式高,但产生行驶路线的走捷径。
[0162]
因此,驾驶辅助控制装置20基于曲率(直线/转弯)、车间距离、先行车辆的横向偏离、离心加速度、车速的各条件,判断在当前的行驶条件下轨迹追踪方式和横摆角追踪方式中的哪一个适当性更高,选择更适当的一方的控制方式,应用于追踪转向控制。
[0163]
由此,能够抑制指令舵角的变动、行驶路线的走捷径,同时能够使车辆1(本车辆)以足够的响应追踪先行车辆,能够提高追踪转向控制的性能。
[0164]
另外,驾驶辅助控制装置20根据行驶条件进行变更轨迹追踪方式的权重以及横摆角追踪方式的权重的加权,能够通过该加权的分配组合使用轨迹追踪方式和横摆角追踪方式这两方。
[0165]
图5的流程图表示通过加权的分配组合使用轨迹追踪方式和横摆角追踪方式这两方的追踪转向控制的一个方式。
[0166]
需要说明的是,图5的流程图中的步骤s201-步骤s207中的处理内容与图2的流程图的步骤s101-步骤s107相同,因此省略关于步骤s201-步骤s207的详细说明。
[0167]
驾驶辅助控制装置20在步骤s208中,与上述步骤s108相同,参照图4的评价模式进行各控制方式的适当性评价。
[0168]
在此,驾驶辅助控制装置20在适当程度为“高”、“中”、“低”这三个等级评价中,在各评价对每个控制方式给予评价分。
[0169]
例如,将适当程度为“高”时的评价分设为5分,将适当程度为“中”时的评价分设为3分,将适当程度为“低”时的评价分设为1分。
[0170]
而且,驾驶辅助控制装置20按控制方式来对曲率、车间距离、先行车辆的横向偏离的各条件下的评价分进行合计,将关于轨迹追踪方式的合计结果代入c1,将关于横摆角追踪方式的合计结果代入c2。
[0171]
即,合计值c1是针对曲率的条件下的轨迹追踪方式的评价分、针对车间距离的条件下的轨迹追踪方式的评价分、针对先行车辆的横向偏离的条件下的轨迹追踪方式的评价分的合计,合计值c2是针对曲率的条件下的横摆角追踪方式的评价分、针对车间距离的条件下的横摆角追踪方式的评价分、针对先行车辆的横向偏离条件下的横摆角追踪方式的评价分的合计,评价分合计值c1、c2越大,表示适当程度越高。
[0172]
接着,在步骤s209中,驾驶辅助控制装置20根据离心加速度求出关于横摆角追踪方式的评价分合计值c2的修正值δc2ac(δc2ac≥0),将评价分合计值c2更新为在步骤s208中求出的评价分合计值c2上加上修正值δc2ac的结果。
[0173]
图6表示离心加速度和修正值δc2ac的相关性。
[0174]
修正值δc2ac的最大值是与步骤s208中的适当程度为“高”时的评价分相同的5分,随着离心加速度变高,从作为最小值的0分到作为最大值的5分逐渐增加(0≤δc2ac≤5)。
[0175]
这是因为,离心加速度越大,轨迹追踪方式的响应越低,横摆角追踪方式的适当程度相对增加,因此驾驶辅助控制装置20通过在离心加速度大时更大地修正评价分合计值c2,增大横摆角追踪方式的权重,抑制响应延迟的发生。
[0176]
接着,在步骤s210中,驾驶辅助控制装置20根据车速v求出关于横摆角追踪方式的评价分合计值c2的修正值δc2vs(δc2vs≥0),将评价分合计值c2更新为在基于步骤s209中的修正值δc2ac修正后的评价分合计值c2上加上修正值δc2vs的结果。
[0177]
图7表示车速与修正值δc2vs的相关性。
[0178]
修正值δc2vs的最大值是与步骤s208中的适当程度为“高”时的评价分相同的5分,随着车速v变高,从作为最小值的0分到作为最大值的5分逐渐增加(0≤δc2vs≤5)。这是因为,车速v越高,轨迹追踪方式的响应越低,横摆角追踪方式的适当性相对增加,因此驾驶辅助控制装置20通过在车速v高时更大地修正评价分合计值c2,增大横摆角追踪方式的权重,而抑制响应延迟的发生。
[0179]
在步骤s211中,驾驶辅助控制装置20对在轨迹追踪方式中求出的各系数(曲率成分、横摆角成分、横向位置成分)以及在横摆角追踪方式中求出的各系数(曲率成分、横摆角成分、横向位置成分),进行基于评价分合计值c1、c2的加权,决定向后续阶段的行驶控制装置30输出的各系数。
[0180]
需要说明的是,在横摆角追踪方式情况下,曲率成分(二次系数)以及横向位置成分(零次系数)为零。
[0181]
驾驶辅助控制装置20根据以下算式12,计算作为控制参数输出到行驶控制装置30的各系数(曲率成分、横摆角成分、横向位置成分)。
[0182]
需要说明的是,在算式12中,用[1/r]tr表示在轨迹追踪方式中求出的曲率成分,用[φ]tr表示横摆角成分,用[yx=0]tr表示横向位置成分,用[1/r]ya表示在横摆角追踪方式中求出的曲率成分,用[φ]ya表示横摆角成分,用[yx=0]ya表示横向位置成分。
[0183]
[式12]
[0184]
输出曲率=[1/r]
tr
*c1/(c1+c2)+[1/r]
ya
*c2/(c1+c2)
[0185][0186]
输出横向位置=[y
x=0
]
tr
*c1/(c1+c2)+[y
x=0
]
ya
*c2/(c1+c2)
[0187]
在此,由于横摆角追踪方式中的[1/r]ya以及[yx=0]ya为零,因此驾驶辅助控制装置20按照以下的式13计算作为控制参数输出到行驶控制装置30的各系数。
[0188]
[式13]
[0189]
输出曲率=[1/r]
tr
*c1/(c1+c2)
[0190][0191]
输出横向位置=[y
x=0
]
tr
*c1/(c1+c2)
[0192]
即,作为控制参数输出到行驶控制装置30的各系数,评价分合计值c1比评价分合计值c2越小,越接近横摆角追踪方式中的系数,评价分合计值c1比评价分合计值c2越大,越接近轨迹追踪方式中的系数。
[0193]
根据图5的流程图所示的追踪转向控制,驾驶辅助控制装置20求出曲率、车间距离、先行车辆的横向偏离、离心加速度、车速的各条件下的轨迹追踪方式的适当程度以及横摆角追踪方式的适当程度,对在各控制方式中求出的各系数进行与各控制方式的适当程度对应的加权,决定最终向行驶控制装置30输出的系数(控制参数)。
[0194]
即,驾驶辅助控制装置20通过组合使用轨迹追踪方式和横摆角追踪方式,能够相互弥补缺点进行追踪转向控制,能够有效利用轨迹追踪方式中的平滑的响应性和横摆角追踪方式的高响应性,同时能够抑制指令舵角的变动和行驶路线的走捷径,能够提高追踪转向控制的性能。
[0195]
需要说明的是,在分配轨迹追踪方式和横摆角追踪方式的处理中,包含切换为轨迹追踪方式和横摆角追踪方式中的某一方来进行追踪转向控制。例如,如果轨迹追踪方式的权重为100%,横摆角追踪方式的权重为0%,则驾驶辅助控制装置20以轨迹追踪方式实施追踪转向控制。
[0196]
在上述实施方式中说明的各技术思想只要不产生矛盾,就能够适当组合并使用。
[0197]
另外,参照优先实施方式具体地说明了本发明的内容,但显而易见,基于本发明的基本技术思想以及启发,本领域技术人员能够采取各种各样的变形方式。
[0198]
在上述实施方式中,驾驶辅助控制装置20基于曲率、车间距离、先行车辆的横向偏离、离心加速度、车速,判断轨迹追踪方式以及横摆角追踪方式的适当性,但也可以基于这些行驶条件中的至少一个进行适当性判断。
[0199]
另外,驾驶辅助控制装置20可以基于指令舵角的变动的增大,从轨迹追踪方式切换为横摆追踪方式,或者以使对横摆追踪方式的加权更大的方式使其变化。
[0200]
另外,驾驶辅助控制装置20可以根据路面的摩擦系数的大小来切换轨迹追踪方式和横摆追踪方式,或者变更两种控制方式的权重。
[0201]
另外,可以将轨迹追踪方式的评价分合计值c1(c1>0)以及横摆追踪方式的评价分合计值c2(c2>0)分别设为固定值,将两种控制方式的加权设为固定来决定追踪转向控制的控制参数。
[0202]
另外,驾驶辅助控制装置20可以按每个系数对轨迹追踪方式的适当程度及横摆角追踪方式的适当程度进行评价,并进行按每个系数所不同的加权从而求出最终的系数。
[0203]
另外,驾驶辅助控制装置20可以对曲率、车间距离等按每个评价项目进行加权。每个评价项目的加权例如可以通过使评价分的最大值在每个评价项目中不同来实现。
[0204]
另外,驾驶辅助控制装置20可以在评价分合计值c1和评价分合计值c2的偏差的绝对值δc为阈值δcth以上时,选择轨迹追踪方式和横摆角追踪方式中的某一方,在上述偏差δc小于阈值δcth时,对轨迹追踪方式和横摆角追踪方式进行与评价分合计值c1、c2对应的加权。
[0205]
在此,对可以从上述实施方式掌握的技术思想在以下进行描述。
[0206]
转向辅助装置作为其一方式,其特征在于,
[0207]
输入与外部识别部所获取的本车辆的外部环境相关的信息、以及与传感器装置所获取的所述本车辆的行动相关的信息,
[0208]
基于与所述外部环境相关的信息以及与所述本车辆的行动相关的信息,求出所述本车辆前方的先行车辆相对于所述本车辆的相对位置,并且更新存储所述相对位置的时间序列数据,
[0209]
基于所述相对位置的时间序列数据,利用二次函数对所述先行车辆的移动轨迹进行近似,求出所述本车辆的目标轨迹的成分作为第一控制参数,
[0210]
利用一次函数对从所述本车辆到所述先行车辆的移动轨迹进行近似,求出所述本车辆的目标轨迹的成分作为第二控制参数,
[0211]
将基于对所述第一控制参数以及所述第二控制参数进行了分配的第三控制参数的与转向相关的指令输出到所述本车辆的转向致动器部。
[0212]
在上述转向辅助系统的优选的方式中,其特征在于,与道路的曲率的增大对应地,实施使对第一控制参数加权的权重大于所述第二控制参数的加权,而求出第三控制参数。
[0213]
另外,在上述转向辅助系统的优选的方式中,其特征在于,与所述先行车辆和所述本车辆之间的车间距离从规定中间值增大对应地,使所述第二控制参数的权重大于所述第一控制参数,与所述车间距离从所述规定中间值减少对应地,实施使对所述第二控制参数加权的权重大于所述第一控制参数的加权,而求出所述第三控制参数。
[0214]
另外,在上述转向辅助系统的优选的方式中,其特征在于,与所述先行车辆的横向偏离增大对应地,实施使对所述第一控制参数加权的权重大于所述第二控制参数的加权,而求出第三控制参数。
[0215]
另外,在上述转向辅助系统的优选的方式中,其特征在于,离心加速度越大,使对所述第二控制参数加权的权重越大,而求出所述第三控制参数。
[0216]
另外,在上述转向辅助系统的优选的方式中,其特征在于,车速越高,使对所述第二控制参数加权的权重越大,而求出所述第三控制参数。
[0217]
进一步地,在上述转向辅助系统的优选的方式中,其特征在于,所述第一控制参数是曲率成分、横摆角成分以及横向位置成分,所述第二控制参数是横摆角成分。
[0218]
需要说明的是,本发明并不限定于上述的实施方式,还包括各种变形例。例如,上述的实施方式是为了容易理解地说明本发明而详细说明的,并不限定于具备所说明的全部结构。另外,可以将某一实施方式的结构的一部分置换为其他实施方式的结构,另外,也可以在某一实施方式的结构中添加其他实施方式的结构。另外,对于各实施方式的结构的一部分,能够进行其他结构的追加、删除、置换。
[0219]
本申请要求基于2018年7月10日申请的日本国特许申请第2018-131045号的优选权。2018年7月10日申请的日本国特许申请2018-131045号的包括说明书、权利要求书、附图以及摘要在内的所有公开内容通过参照作为整体编入本申请。
[0220]
附图标记说明
[0221]
1 车辆(本车辆)
[0222]
10 车辆控制系统
[0223]
20 驾驶辅助控制装置(车辆控制装置)
[0224]
30 行驶控制装置
[0225]
40 转向控制装置
[0226]
50 外界识别装置(外界识别部)
[0227]
60 车速传感器
[0228]
70 横摆率传感器
[0229]
80 舵角传感器
[0230]
90 电动动力转向装置(转向致动器)
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签:

 热门咨询
热门咨询




tips