
 商标分类
商标分类  商标转让
商标转让 
一种电动车充电枪自动连接识别、充电系统及其操作方法与流程
 2021-02-03 14:02:30|
2021-02-03 14:02:30| 355|
355| 起点商标网
起点商标网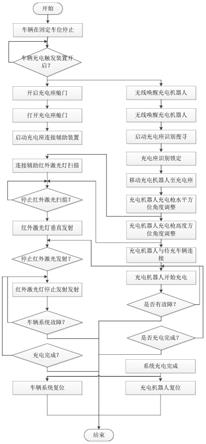
[0001]
本发明涉及一种电动车充电枪自动连接识别、充电系统及其操作方法,属于电动汽车电子应用技术领域。
背景技术:
[0002]
在不可再生能源和汽车排放环保形势日益严峻的当代,新能源汽车的应用得到社会支持,其中纯电动汽车作为新能源汽车中最主要的一种类型得到了大力推广和应用,截至2019年底,我国新能源汽车保有量已经达到381万辆,其中纯电动车所占比率超过81.2%,同时全国公私充电桩总数量也达到了121万台。但在实际的电动车应用过程中存在较多的充电问题,所以研究开发一种电动车充电枪自动连接识别和充电方法,不但便于驾驶员操作电动车的充电和应用,而且对于电动车辆的推广,日常使用和车辆的普及具有重要的意义,同时也是提升厂商品牌竞争力的重要手段。
[0003]
在中国国内目前纯电动车(含具有plug-in功能的混合动力/增程式/燃料电池)的充电接口及充电标准为直流充电接口和交流充电接口,遵循的充电标准为gb/t18487.1-2015等。其中直流充电接口作为可快速充电的接口具有快速充电模式,作为绝大数电动车辆标配接口。在实际应用存在一下问题,首先:直流充电需要驾驶员操控充电桩,并对桩进行设置和操控才能启动充电,过程复杂,并且需要设置过多参数,才能启动直流充电桩,同时由于各桩厂控制差异,容易误操作。其次:按照标准要求直流充电枪与充电座插拔力需要≥100牛的分断力,并且由于充电枪电缆和枪头重量,对于普通人插拔充电器十分不便,特别是女性,十分不友好,操作较难。再则:随着自动泊车、无人驾驶等车辆智能驾驶技术的发展,也需要电动车充电系统的智能化。
技术实现要素:
[0004]
本发明的目的在于,提供一种电动车充电枪自动连接识别、充电系统及其操作方法,具有自动搜寻车辆充电接口、自动调整连接充电接口和充电的方法。可以解决驾驶员充电设置及启动误操作问题、同时解决驾驶员充电操作插拔的难题,并且在未来无人驾驶等智能交通领域有着巨大发展潜力。
[0005]
为实现上述目的,本发明采用的技术方案如下:一种电动车充电枪自动连接识别、充电系统,由车辆部分及车位部分组成,所述车辆部分包括安装于驾驶室的仪表台位置的车辆充电触发装置及安装于充电座仓内支架上的充电座连接辅助装置,所述车位部分包括布置在车位上的可移动充电枪自动连接机器人;所述车辆充电触发装置与可移动充电枪自动连接机器人之间通过无线通讯连接。
[0006]
进一步的,所述车辆充电触发装置为安装于驾驶室的仪表台上的开关按钮,用于开启充电开关激活作用,当车辆在车位停放时,通过所述车辆充电触发装置开启充电座仓门、激活充电座连接辅助装置和无线射频激活车位充电机器人。
[0007]
所述充电座连接辅助装置为安装于充电座仓内支架上的红外激光束,所述红外激
光束垂直于充电座安装支架或底板。
[0008]
所述可移动充电枪自动连接机器人由充电座方位搜寻红外ccd传感器、位置识别红外光敏二极管、充电枪旋转及俯仰机械臂和连接充电桩的电力线束组成,主要用来搜寻、识别车辆充电作,并定位连接充电枪,充电和断开。
[0009]
一种电动车充电枪自动连接识别、充电系统的操作方法,包括如下步骤,步骤1,车辆充电触发,步骤1.1,当电动车停放在具有自动充电的车位时,驾驶员开启车辆自动充电功能,充电触发装置通过ism频段355mhz射频无线通讯激活车位上的可移动充电枪自动连接机器人,开启自动充电流程;步骤1.2,通过车载can通讯总线传输充电座仓门开启指令和启动充电座连接辅助装置中用于定位的单束红外激光束,此激光束可以垂直于充电护板在平行于地面的平面内
±
15
°
摆动,当角度为0
°
时,即垂直于车辆充电座护板,此激光束采用10hz-100hz随机频率中一个固定频率发射,并通过ism频段355hz射频将发射频率传输至充电机器人;步骤1.3,等待车位上的可移动充电枪自动连接机器人的充电枪自动搜寻与识别、若5分钟未收到无线搜寻状态指令则超时处理;步骤2,充电枪自动识别,步骤2.1,固定车位上的可移动充电枪自动连接机器人在收到车辆充电触发的355mhz无线激活指令后,通过旋转充电机器人上布置的充电座自动识别搜寻红外ccd传感器,以识别充电座与充电机器人之间的相对角度,通过识别红外ccd传感器捕捉到固定红外激光束及激光束频率与车辆发出频率相等,且红外激光束通过ccd传感器中心光敏单元并锁定,即可确认车辆充电座的相对位置,并通过自动充电机器人内置计算机计算相对角度;步骤2.2,通过充电机器人计算车辆充电座与充电机器人之间的相对角度后,充电机器人沿着车位侧面标识线或者固定的轨道移动至充电座相对应的垂线位置处,同时旋转ccd传感器始终锁定红外激光束通过中心电光敏单元,当ccd角度为0
°±1°
时,随即停止充电机器人的移动,确认此处为充电座红外激光束垂线处;步骤3,充电枪自动连接,步骤3.1,当自动充电枪识别车辆充电座并移动到充电座对应的垂线位置后,并且ccd角度为
±1°
平行于地面后,通过红外激光束在ccd传感器通过中心电光敏单元与ccd传感器边框的夹角,计算机器人充电枪与车辆充电座之间的夹角角度,并根据此角度对应调整充电机器人充电枪的水平角度位置,使其垂直于充电座护板,平行于充电座连接辅助激光束,完成充电枪水平角度定位;步骤3.2,当充电机器人与充电座垂直线平行,充电枪平行于充电座辅助连接激光束后,自动充电机器人升起充电枪,并通过安放在充电座的连接辅助红外激光束和充电枪上的红外光敏二极管,对充电枪升降高度进行定位,此时充电座连接辅助红外激光灯光束平行于地平面
±
15
°
往复扫描发射,当充电机器人红外光敏二极管接收到了充电座上对应的红外激光束后,停止充电座的升降;同时通过无线指令读取充电座辅助连接红外激光灯的角度,令充电座连接辅助激光束保持垂直于充电座板,根据读取的红外激光灯水平角度,移动充电机器人的位置,使充电枪红外光敏二极管采样到充电座辅助连接红外激光束后停止移动,完成充电枪与充电座识别定位,同时指令充电座连接辅助红外激光束停止发射,完成
高度定位;步骤3.3,当充电机器人完成水平和高度定位后,充电机器人控制充电枪伸缩移动,使充电枪向车辆充电座移动,同时根据充电枪上的连接确认信号和控制充电枪移动的电机堵转电流,识别枪的完全插入位置,停止伸缩移动,完成充电枪的插入连接;步骤4,自动充电,当充电机器人的充电枪完成充电枪与车辆充电座的连接后,自动启动国标充电流程,并直至电池满充后完成整个充电流程;步骤5,充电完成,步骤5.1,当充电完成后,充电枪按照连接流程自动断开返回,复位至充电开始前的待机状态;步骤5.2,当充电完成时,充电枪与充电座自动分离后,车辆关闭充电座连接辅助装置和关闭仓门。
[0010]
本发明的有益效果在于:本发明根据电动车在实际应用中存在的充电难题和问题,设计了一种电动车充电枪自动识别及连接充电的方法。首先,通过可移动充电机器人自动搜寻充电座,识别定位充电枪与车辆充电座之间的方位,实现充电枪与充电座的连接,并启动充电。其次,在车辆完成充电或者达到设定条件时可以自动断开充电枪。再则,本发明可以代替人工的电动车充电操作,降低车辆充电操作的复杂程度,并且可应用于未来的自动泊车充电、无人驾驶等智能交通领域,在未来的无人驾驶等知道能交通领域有着更多潜在的应用。
附图说明
[0011]
图1是本发明中电动车充电枪自动连接及充电装置示意图。
[0012]
图2 是本发明中电动车充电座连接辅助装置示意图。
[0013]
图3是本发明中充电枪自动连接机器人结构示意图。
[0014]
图4是本发明中ccd传感器充电枪与车辆夹角计算示意图。
[0015]
图5是本发明的电动车充电枪自动识别、连接充电流程示意图。
具体实施方式
[0016]
以下将结合附图所示的各实施方式对本发明进行详细描述。但这些实施方式并不限制本发明,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
[0017]
本实施例提出的一种电动车充电枪自动连接识别、充电系统,可以应用所有含有交直流充电接口的新能源车辆。
[0018]
该系统由两大部分组成,包括车辆部分:车辆充电触发装置和充电座连接辅助装置。车位部分:布置在车位上的可移动充电枪自动连接机器人,见附图1所示。
[0019]
车辆充电触发装置:车辆充电触发装置,安装在驾驶室的仪表台位置,当车辆在车位停放时,通过该充电触发装置可以开启充电座仓门、激活充电座连接辅助装置和无线射频激活车位充电机器人。
[0020]
充电座连接辅助装置:充电座连接辅助装置是安装在充电座仓内支架上的红外激光束,光束垂直于充电座安装支架或底板,可在垂直于充电护板和平行于地面的平面内
±
15
°
摆动,用于充电座插入位置的精确识别定位和充电枪连接辅助,附图2所示。
[0021]
可移动充电枪机器人:充电枪机器人由充电座方位搜寻红外ccd传感器、位置识别红外光敏二极管、充电枪旋转及俯仰机械臂和连接充电桩的电力线束组成,主要用来搜寻、识别车辆充电作,并定位连接充电枪,充电和断开,附图3所示。
[0022]
自动识别连接充电主要分为以下步骤:车辆充电触发、充电枪自动识别、充电枪自动连接、充电和充电终止,实现一个完成的自动充电过程。其具体步骤如下。
[0023]
步骤1,车辆充电触发,步骤1.1,当电动车停放在具有自动充电的车位时,驾驶员开启车辆自动充电功能,充电触发装置通过ism频段355mhz射频无线通讯激活车位上的可移动充电枪自动连接机器人,开启自动充电流程;步骤1.2,通过车载can通讯总线传输充电座仓门开启指令和启动充电座连接辅助装置中用于定位的单束红外激光束,此激光束可以垂直于充电护板在平行于地面的平面内
±
15
°
摆动,当角度为0
°
时,即垂直于车辆充电座护板,此激光束采用10hz-100hz随机频率中一个固定频率发射,并通过ism频段355hz射频将发射频率传输至充电机器人。
[0024]
步骤1.3,等待车位上的可移动充电枪自动连接机器人的充电枪自动搜寻与识别、若5分钟未收到无线搜寻状态指令则超时处理。
[0025]
步骤2,充电枪自动识别,步骤2.1,固定车位上的可移动充电枪自动连接机器人在收到车辆充电触发的355mhz无线激活指令后,通过旋转充电机器人上布置的充电座自动识别搜寻红外ccd传感器,以识别充电座与充电机器人之间的相对角度,红外ccd最大可旋转角度为180
°
,旋转范围是
±
90
°
,此ccd传感器采用分辨率为0.5
°
的步进电机控制旋转,通过识别红外ccd传感器捕捉到固定红外激光束及激光束频率与车辆发出频率相等,且红外激光束通过ccd传感器中心光敏单元并锁定,即可确认车辆充电座的相对位置,并通过自动充电机器人内置计算机计算相对角度。
[0026]
步骤2.2,通过充电机器人计算车辆充电座与充电机器人之间的相对角度后,充电机器人沿着车位侧面标识线或者固定的轨道移动至充电座相对应的垂线位置处,同时旋转ccd传感器始终锁定红外激光束通过中心电光敏单元。通过红外ccd传感器的驱动控制步进电机,当ccd角度为0
°±1°
时,随即停止充电机器人的移动,确认此处为充电座红外激光束垂线处。
[0027]
步骤3,充电枪自动连接,步骤3.1,当自动充电枪识别车辆充电座并移动到充电座对应的垂线位置后,并且ccd角度为
±1°
平行于地面后,通过红外激光束在ccd传感器通过中心电光敏单元与ccd传感器边框的夹角,计算机器人充电枪与车辆充电座之间的夹角角度,并根据此角度对应调整充电机器人充电枪的水平角度位置,使其垂直于充电座护板,平行于充电座连接辅助激光束,完成充电枪水平角度定位。
[0028]
步骤3.2,当充电机器人与充电座垂直线平行,充电枪平行于充电座辅助连接激光束后,自动充电机器人升起充电枪,并通过安放在充电座的连接辅助红外激光束和充电枪上的红外光敏二极管,对充电枪升降高度进行定位,此时充电座连接辅助红外激光灯光束平行于地平面
±
15
°
往复扫描发射,当充电机器人红外光敏二极管接收到了充电座上对应
的红外激光束后,停止充电座的升降;同时通过无线指令读取充电座辅助连接红外激光灯的角度,令充电座连接辅助激光束保持垂直于充电座板,根据读取的红外激光灯水平角度,移动充电机器人的位置,使充电枪红外光敏二极管采样到充电座辅助连接红外激光束后停止移动,完成充电枪与充电座识别定位,同时指令充电座连接辅助红外激光束停止发射,完成高度定位。
[0029]
步骤3.3,当充电机器人完成水平和高度定位后,充电机器人控制充电枪伸缩移动,使充电枪向车辆充电座移动,同时根据充电枪上的连接确认信号(国标gb/t18487-1 2015 直流充电枪cc1和交流充电枪cc)和控制充电枪移动的电机堵转电流,识别枪的完全插入位置,停止伸缩移动,完成充电枪的插入连接。
[0030]
步骤4,自动充电,当充电机器人的充电枪完成充电枪与车辆充电座的连接后,自动启动国标充电流程,并直至电池满充后完成整个充电流程。
[0031]
步骤5,充电完成,步骤5.1,当充电完成后,充电枪按照连接流程自动断开返回,复位至充电开始前的待机状态。
[0032]
步骤5.2,当充电完成时,充电枪与充电座自动分离后,车辆关闭充电座连接辅助装置和关闭仓门。
[0033]
应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施方式中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
[0034]
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方式或变更均应包含在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips