
 商标分类
商标分类  商标转让
商标转让 
倒车系统和车辆的制作方法
 2021-02-03 14:02:52|
2021-02-03 14:02:52| 285|
285| 起点商标网
起点商标网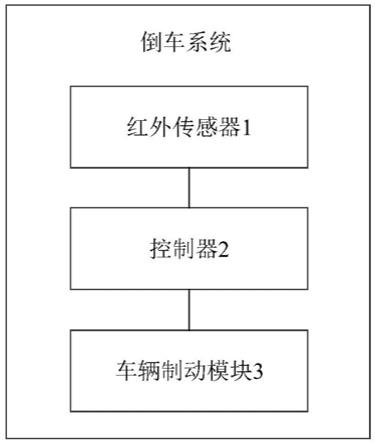
[0001]
本公开涉及车辆技术领域,具体地,涉及一种倒车系统和车辆。
背景技术:
[0002]
随着人们生活水平逐渐提高,车辆的普及程度也逐渐提高,车辆的行车安全成为突出的问题。为了提高倒车的安全性能,通常在车辆上安装倒车雷达或者倒车摄像头来识别车辆后方的障碍物。但是,倒车摄像头的探测范围有限,且受光线的影响较大。倒车雷达通常被安装在后保险杠上,安装位置较高,往往无法探测到车后的小孩子或者小动物,不能保证倒车时的安全性。
技术实现要素:
[0003]
为了解决相关技术中存在的问题,本公开提供一种倒车系统和车辆。
[0004]
为了实现上述目的,根据本公开实施例的第一方面,提供一种倒车系统,所述系统包括:
[0005]
红外传感器、控制器和车辆制动模块;
[0006]
所述红外传感器,设置在车辆的尾部,用于在所述车辆处于倒车状态时,检测车辆后方的生物与所述车辆尾部的距离;
[0007]
所述控制器,分别与所述红外传感器和所述车辆制动模块相连,用于接收所述红外传感器发送的所述距离,并在所述车辆未处于制动状态时,根据所述距离,确定是否向所述车辆制动模块发送制动指令;
[0008]
所述车辆制动模块,用于在接收到所述控制器发送的所述制动指令时,根据所述制动指令控制所述车辆制动。
[0009]
可选地,所述控制器,用于在所述车辆未处于制动状态,且所述距离小于第一预设距离时,向所述车辆制动模块发送制动指令。
[0010]
可选地,所述系统还包括提示模块;
[0011]
所述控制器,与所述提示模块相连,用于在所述距离小于所述第一预设距离时,向所述提示模块发送第一提示信号;
[0012]
所述提示模块,用于在接收到所述控制器发送的所述第一提示信号时,输出第一提示信息。
[0013]
可选地,所述控制器,用于在所述距离大于或等于所述第一预设距离且小于第二预设距离时,向所述提示模块发送第二提示信号,其中,所述第一预设距离小于所述第二预设距离;
[0014]
所述提示模块,用于在接收到所述控制器发送的所述第二提示信号时,输出第二提示信息。
[0015]
可选地,所述系统还包括:显示模块;
[0016]
所述控制器,与所述显示模块相连,用于在所述距离小于第三预设距离时,向所述
显示模块发送所述距离,其中,所述第二预设距离小于所述第三预设距离;
[0017]
所述显示模块,用于接收所述控制器发送的所述距离,并显示所述距离。
[0018]
可选地,所述系统还包括:图像采集模块;
[0019]
所述图像采集模块,设置在车辆的尾部,与所述控制器相连,用于采集所述车辆后方的图像,并将所述图像发送至所述控制器;
[0020]
所述控制器,用于接收所述图像采集模块发送的所述图像,并将所述图像发送至所述显示模块;
[0021]
所述显示模块,用于接收并显示所述图像。
[0022]
可选地,所述显示模块,用于将所述图像和所述距离分屏显示。
[0023]
可选地,所述车辆制动模块,还用于在接收到所述控制器发送的所述制动指令时,根据所述制动指令,控制所述车辆在碰撞到所述生物之前将速度降低至0。
[0024]
可选地,所述控制器为以下中的至少一者:数字信号处理器、arm处理器、fpga处理器。
[0025]
根据本公开实施例的第二方面,提供一种车辆,包括本公开第一方面提供的倒车系统。
[0026]
通过上述技术方案,由于红外传感器能够在车辆处于倒车状态时,检测车辆后方的生物与车辆尾部的距离;控制器能够接收红外传感器发送的车辆后方的生物与车辆尾部的距离,并在车辆未处于制动状态时,根据该距离,确定是否向车辆制动模块发送制动指令;车辆制动模块能够根据制动指令控制车辆制动。这样,控制器能够基于红外传感器检测的车辆后方的障碍物与车辆尾部的距离,通过控制车辆制动模块实现车辆制动的目的,不仅可以提高倒车的智能化,而且还可以避免倒车的过程中对车辆后方的生物造成的潜在危险,提高倒车的安全性。
[0027]
本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
[0028]
附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
[0029]
图1是根据一示例性实施例示出的一种倒车系统的示意图。
[0030]
图2是根据另一示例性实施例示出的一种倒车系统的示意图。
[0031]
图3是根据另一示例性实施例示出的一种倒车系统的示意图。
[0032]
图4是根据另一示例性实施例示出的一种倒车系统的示意图。
[0033]
附图标记说明
[0034]1ꢀꢀꢀ
红外传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2ꢀꢀꢀ
控制器
[0035]3ꢀꢀꢀ
车辆制动模块
ꢀꢀꢀꢀꢀꢀꢀꢀ4ꢀꢀꢀ
提示模块
[0036]5ꢀꢀꢀ
显示模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ6ꢀꢀꢀ
图像采集模块
具体实施方式
[0037]
以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
[0038]
图1是根据一示例性实施例示出的一种倒车系统的示意图。如图1所示,该倒车系统可以包括:红外传感器1、控制器2和车辆制动模块3;
[0039]
红外传感器1,用于在车辆处于倒车状态时,检测车辆后方的生物与车辆尾部的距离。
[0040]
其中,车辆后方的生物可以包括行人或者动物。红外传感器1可以设置在车辆的尾部,例如本车的后保险杠上,用于检测车辆后方的生物与车辆尾部的距离。本领域技术人员须知的是,倒车雷达通常被安装在车辆的后保险杠上,通过发送超声波撞击障碍物后的反射超声波来确定车辆尾部和车辆后方的障碍物之间的距离。但是,由于倒车雷达的安装位置较高,无法探测到车辆后方的小孩子或者小动物,存在较大的探测盲区。而红外传感器1通过发射红外光来探测车辆后方的生物,探测范围大,可以消除倒车雷达的探测盲区。
[0041]
具体地,红外传感器1,用于检测车辆后方是否存在生物,并在检测到车辆后方存在生物时,确定该生物与车辆尾部的距离。
[0042]
示例地,红外传感器1的红外线发射器会发射红外光,在照射到车辆后方的生物后形成一个反射过程,并通过接收到的反射光来确定车辆后方是否存在生物,以及车辆后方的生物与车辆尾部的距离。需要说明的是,本方案中采用的用于确定车辆后方是否存在生物,以及车辆后方的生物与车辆尾部的距离的方案可参照现有技术,这里不再赘述。
[0043]
控制器2,分别与红外传感器1和车辆制动模块3相连,用于接收红外传感器1发送的距离,并在车辆未处于制动状态时,根据该距离,确定是否向车辆制动模块3发送制动指令。
[0044]
车辆制动模块3,用于在接收到控制器2发送的制动指令时,根据制动指令控制车辆制动。
[0045]
在本公开中,控制器2可以为以下中的至少一者:数字信号处理器(digital signal processor,简称dsp)、arm处理器、fpga(field programmable gate array,现场可编程逻辑门阵列)处理器。例如,控制器2可以为数字信号处理器dsp,也可以为arm处理器。又例如,控制器2还可以包括arm处理器和fpga处理器,本公开对此不作具体限定。
[0046]
车辆制动模块3,在接收到控制器2发送的制动指令时,可以根据控制指令控制车辆制动,以控制该车辆的车速降低。
[0047]
采用上述技术方案,由于红外传感器1能够在车辆处于倒车状态时,检测车辆后方的生物与车辆尾部的距离;控制器2能够接收红外传感器1发送的车辆后方的生物与车辆尾部的距离,并在车辆未处于制动状态时,根据该距离,确定是否向车辆制动模块3发送制动指令;车辆制动模块3能够根据制动指令控制车辆制动。这样,控制器2能够基于红外传感器1检测的车辆后方的障碍物与车辆尾部的距离,通过控制车辆制动模块3实现车辆制动的目的,不仅可以提高倒车的智能化,而且还可以避免倒车过程中对车辆后方的生物造成的潜在危险,提高倒车的安全性。
[0048]
在倒车的过程中,为了最大程度地减小车辆对其后方的生物造成伤害,车辆制动模块3,还用于在接收到控制器2发送的制动指令时,根据该制动指令,控制车辆在碰撞到生物之前将速度降低至0。
[0049]
具体地,控制器2,用于接收红外传感器1发送的车辆后方的生物与车辆尾部的距离,并在车辆未处于制动状态时,根据该距离和车辆的当前行驶速度,确定车辆的制动减速
度,并向车辆制动模块3发送制动指令。如此,车辆制动模块3,在接收到控制器2发送的制动指令时,就可以控制车辆按照制动减速度制动,以在碰撞到车辆后方的生物之前将车辆的速度降低至0,从而避免了对车辆后方的生物造成伤害。
[0050]
此外,控制器2,用于在车辆未处于制动状态,且距离小于第一预设距离时,向车辆制动模块3发送制动指令。
[0051]
考虑到在倒车的过程中,如果车辆后方的生物与车辆尾部之间的距离较近,且驾驶员未注意到车辆后方的生物时,容易引发交通事故。因此,为了避免上述问题,控制器2,用于在车辆未处于制动状态,且车辆后方的生物与车辆尾部的距离小于第一预设距离时,向车辆制动模块3发送制动指令。
[0052]
其中,第一预设距离可以预先存储在控制器2中。具体地,可以通过实验对第一预设距离进行标定,并将标定后的第一预设距离存储在控制器2中,其可以例如为1.5m。
[0053]
在本公开中,控制器2在确定出车辆后方的生物与车辆尾部的距离小于第一预设距离时,可以通过检测can总线上是否有制动信号来确定车辆是否处于制动状态。具体地,在检测到can总线上的制动信号时,确定车辆处于制动状态。在未检测到can总线上的制动信号时,确定车辆未处于制动状态。这样,控制器2可以在车辆未处于制动状态,且车辆后方的生物与车辆尾部的距离小于第一预设距离时,向车辆制动模块3发送制动指令,以控制车辆自动制动,从而避免了交通事故的发生。
[0054]
另外,在倒车的过程中,当车辆后方的生物与车辆尾部的距离较近时,为了提醒驾驶员注意,该倒车系统还可以包括提示模块4。具体地,请参照图2,图2是根据另一示例性实施例示出的一种倒车系统的示意图。
[0055]
控制器2,与提示模块4相连,用于在该距离小于第一预设距离时,向提示模块4发送第一提示信号。
[0056]
提示模块4,用于在接收到控制器2发送的第一提示信号时,输出第一提示信息。
[0057]
其中,提示模块4可以包括以下中的至少一者:车载语音播报装置、车内蜂鸣器等等。示例地,提示模块4可以包括车载语音播报装置,通过车载语音播报装置输出提示信息,以提醒驾驶员注意车辆后方的生物。例如,通过车载语音播报装置输出急促的播报声,以提醒驾驶员注意车辆后方的生物。又示例地,该提示模块4可以包括车内蜂鸣器,通过车内蜂鸣器输出急促的报警音以提醒驾驶员注意车辆后方的生物。又示例地,该提示模块可以包括车载语音播报装置和车内报警器,同时通过语音播报和报警音的方式提示驾驶员注意,以避免碰撞到车辆后方的生物。
[0058]
此外,在实际应用的过程中,为了提醒驾驶员注意,并提前预防交通事故的发生,控制器2,还用于在车辆后方的生物与车辆尾部的距离大于或等于第一预设距离且小于第二预设距离时,向提示模块4发送第二提示信号。提示模块4,用于在接收到控制器2发送的第二提示信号时,输出第二提示信息。
[0059]
其中,第一预设距离小于第二预设距离,且第二预设距离可以预先存储在控制器2中。具体地,可以通过实验对该第二预设距离进行标定,并将标定后的第二预设距离存储在控制器2中,其可以例如为3m。具体地,可以通过车载语音播报装置输出较平缓的播报声,和/或,通过车内蜂鸣器输出较平缓的报警音,以提示驾驶员注意车辆后方的生物。
[0060]
需要说明的是,若倒车系统包括倒车雷达,在倒车雷达探测出车辆后方的障碍物
(生物或者固定障碍物)与车辆尾部的距离小于预设的安全距离时,还可以通过提示模块4输出提示信息,并且提示模块4输出提示信息的形式可以和上述提示信息的形式相同或者不同,本公开不作具体限定。
[0061]
为了使驾驶员能够及时了解车辆后方的生物与车辆尾部之间的距离,该倒车系统还可以包括显示模块5。具体地,请参照图3,图3是根据另一示例性实施例示出的一种倒车系统的示意图。
[0062]
控制器2,与显示模块5相连,用于在车辆后方的生物与车辆尾部的距离小于第三预设距离时,向显示模块5发送该距离。
[0063]
显示模块5,用于接收控制器2发送的该距离,并显示该距离。
[0064]
在本公开中,第二预设距离小于第三预设距离,且第三预设距离可以预先存储在控制器2中。具体地,可以通过实验对第三预设距离进行标定,并将标定后的第三预设距离存储在控制器2中,其可以例如为5m。其中,显示模块5可以为车载多媒体显示屏。示例地,控制器2可以在车辆后方的生物与车辆尾部的距离小于第三预设距离时,向车载多媒体显示屏发送该距离。接着,车载多媒体显示屏可以将接收到的距离以一个个亮点的形式显示在车载多媒体显示屏上,其中,每一个亮点代表一个车辆后方的生物,每一个亮点中包括车辆后方的生物与车辆尾部的距离。这样,驾驶员通过观察车载多媒体显示屏就可以轻松地获知车辆后方的生物的数量,以及车辆后方的生物与车辆尾部的距离。需要说明的是,车辆后方的生物与车辆尾部的距离在显示模块5中的显示方式,本公开不作具体限定。
[0065]
为了使驾驶员能够了解车辆后方的路况,该倒车系统还可以包括图像采集模块6。具体地,请参照图4,图4是根据另一示例性实施例示出的一种倒车系统的示意图。
[0066]
图像采集模块6,设置在车辆的尾部,与控制器2相连,用于采集车辆后方的图像,并将图像发送至控制器2;
[0067]
控制器2,用于接收图像采集模块6发送的该图像,并将该图像发送至显示模块5;
[0068]
显示模块5,用于接收并显示该图像。
[0069]
其中,图像采集模块6可以为倒车摄像头。具体地,在倒车的过程中,倒车摄像头可以实时地采集车辆后方的图像,并将采集到的图像发送至控制器2。接着,控制器2可以将接收到的图像发送显示模块5,以使显示模块5显示车辆后方的图像。
[0070]
此外,考虑到在实际应用的过程中,显示模块5既要显示车辆后方的图像,又要显示车辆后方的生物与车辆尾部的距离,为了使驾驶员清楚地获知车辆后方的路况和车辆后方的生物与车辆尾部的距离,在本公开中,一种优选的实施方式为:将车辆后方的图像和车辆后方的生物与车辆尾部的距离分屏显示。例如,将车辆后方的图像显示在显示模块5的左侧,使车辆后方的生物与车辆尾部的距离显示在显示模块5的右侧。又例如,将车辆后方的图像显示在显示模块5的整个屏幕上,将车辆后方的生物与车辆尾部的距离以悬浮窗的形式显示在显示模块5的右上角。需要说明的是,本公开对车辆后方的图像和车辆后方的生物与车辆尾部的距离在显示模块5上分屏显示的方式不作具体限定,只要能够使驾驶员同时获知车辆后方的路况和车辆后方的生物与车辆尾部的距离即可。
[0071]
为了便于本领域的技术人员更好的理解本公开提供的倒车系统,下面以完整的实施例进行说明。
[0072]
在倒车的过程中,图像采集模块6实时采集车辆后方的图像,并通过控制器2将车
辆后方的图像发送至显示模块5显示。红外传感器1实时检测车辆后方的生物和车辆尾部的距离,并将车辆后方的生物和车辆尾部的距离发送至控制器2。接着,控制器2根据车辆后方的生物和车辆尾部的距离,控制车辆执行相应的操作。
[0073]
示例地,在车辆后方的生物和车辆尾部的距离小于第三预设距离(例如5m)时,向显示模块5发送该距离。接着,显示模块5可以将接收到的距离和车辆后方的图像分屏显示。随着倒车的进行,在车辆后方的生物和车辆尾部的距离小于第二预设距离(例如3m)时,控制器2,向提示模块4发送第二提示信号,以控制提示模块4输出第二提示信息。例如,可以通过车载语音播报装置输出较平缓的播报声,和/或,通过车内蜂鸣器输出较平缓的报警音,以提示驾驶员注意车辆后方的生物。之后,在车辆后方的生物和车辆尾部的距离小于第一预设距离(例如1.5m),向提示模块4发送第一提示信号,以控制提示模块4输出第一提示信息。例如,可以通过车载语音播报装置输出急促的播报声,和/或,通过车内蜂鸣器输出急促的报警音,以提示驾驶员注意车辆后方的生物。并在车辆未处于制动状态时,向车辆制动模块3发送制动指令,以控制车辆自动制动。
[0074]
基于同一发明构思,本公开实施例还提供一种车辆,包括上述的倒车系统。
[0075]
以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
[0076]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
[0077]
此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips