
 商标分类
商标分类  商标转让
商标转让 
用于避免车辆与障碍物碰撞的方法和驾驶辅助系统与流程
 2021-02-03 14:02:04|
2021-02-03 14:02:04| 276|
276| 起点商标网
起点商标网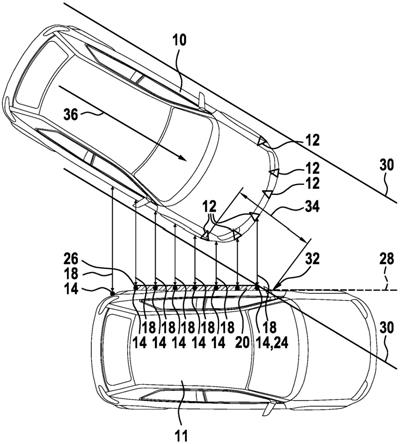
[0001]
本发明涉及一种用于避免车辆与障碍物碰撞的方法,其中,通过至少一个超声波传感器确定车辆与车辆周围环境中的障碍物之间的间距,其方式是,至少一个超声波传感器发送信号并且又接收该信号在障碍物处反射的回波。本发明还涉及一种用于避免车辆碰撞的驾驶辅助系统,该驾驶辅助系统包括至少一个超声波传感器,用于确定车辆与在车辆周围环境中的障碍物之间的间距,并且该驾驶辅助系统构造为用于实施所述方法。
背景技术:
[0002]
在汽车领域中,使用在实施不同行驶操纵时应辅助驾驶员的不同驾驶辅助系统。例如,借助配属于车辆的传感器感测周围环境、在周围环境中求取可能的停车位并且在泊车时辅助驾驶员的泊车辅助系统属于所述驾驶辅助系统。其他的驾驶辅助系统例如警告驾驶员位于盲区中的对象。一些驾驶辅助系统包括制动功能,该制动功能使车辆在出现碰撞之前制动。
[0003]
由de10 2014 111 951 a1已知一种用于警告机动车的驾驶员在周围环境中存在对象的方法。在该方法中,连续地求取机动车与对象之间的最小间距,其中,在该最小间距低于预先确定的极限值时输出警告。附加地,连续地求取碰撞间距,该碰撞间距描述当机动车在所求取的行驶通道内运动时在该机动车与对象之间的间距。
[0004]
由de10 2013 021 827 al已知一种用于警告机动车的驾驶员存在碰撞危险的方法。在该方法中,除了在车辆行驶通道内的对象外,也考虑位于行驶通道外的警告区域中的对象。例如,在倒车行驶时可以在机动车左前拐角的区域中限定警告区域。以这种方式例如可以避免与位于车辆左侧的长形对象的碰撞,然而,该长形对象伸进到行驶通道中的部分位于机动车的传感器的探测范围以外。
[0005]
现有技术的缺点是,与伸进到车辆的行驶通道中的对象的碰撞通常非常晚才被探测到,使得通常不再能通过制动避免碰撞。
技术实现要素:
[0006]
提出了一种用于避免车辆与障碍物碰撞的方法,其中,通过至少一个超声波传感器来确定车辆与在车辆周围环境中的障碍物之间的间距,其方式是,至少一个超声波传感器发送信号并且又接收该信号在障碍物处反射的回波。
[0007]
在该方法中设置,在该方法的步骤a)中,在车辆运动期间确定反射点,其中,这些反射点代表超声波传感器的信号被反射的地点。在该方法的后续步骤b)中,将确定的反射点配属于对象。在此,尤其将反射点概括成连贯的、线性延伸的壁区段,其中,一个壁区段具有两个端部。
[0008]
在该方法的接下来的步骤c)中确定:壁区段的一端是开放的还是闭合的。如果与一个端部邻接的反射点遵循非线性走势,或者如果在车辆进一步运动时没有另外的反射点与壁区段的该对应端部汇合,则认为该壁区段的端部是闭合的。否则,壁区段的端部被认为
是开放的。
[0009]
在该方法的后续步骤d)中,针对具有至少一个开放端部的壁对象,对接着开放端口的走势实施外推法。在该方法的接下来的步骤e)中,求取车辆与壁区段的被执行外推法的走势之间的虚拟碰撞点。在该方法的后续步骤f)中,如果车辆面临与虚拟碰撞点的碰撞,则采取制动干预。
[0010]
为了根据该方法的步骤a)确定反射点,例如由超声波传感器发送信号并且又由该传感器接收被周围环境中的对象反射的超声波回波。在此,针对每个所接收的超声波回波,根据信号发送和回波接收之间的传播时间来确定对象相对于车辆的间距。此外,除了为所求取的间距或者说距离值以外,还为用于形成反射点所求取的间距配属时间点和/或配属关于由车辆驶过的路程的参照。以这种方式可以由这些反射点产生以下走势:在该走势中建立了所测量的间距和测量所述间距的时间之间的关联性和/或与由车辆驶过的路程的关联性。
[0011]
如果使用至少两个超声波传感器,它们的能感知到这些对象回波的探测范围至少部分重叠,则借助于通过这两个超声波传感器来测量与对象的间距并且借助接下来的最小二乘法不仅可以求取车辆与发生反射的对象之间的间距,而且也可以确定对象或者说反射点相对于车辆的相对位置。在这种情况下优选的是,为了形成这些反射点的走势,将接收到回波的时间以及反射点相对于车辆的位置配属于该反射点。
[0012]
在方法的步骤b)中,将所求取的反射点概括成对象。为此,例如可以在使用追踪滤波器的情况下分析这些反射点的走势,其中,将彼此紧密并列的反射点概括成一个对象。为了合并这些反射点,例如可以设置,创建虚拟的周围环境地图。在该周围环境地图中,针对每个反射点输入一个地点。为了创建该环境地图,在此尤其使用针对给定的反射点所记录的、相对于车辆的距离或者说位置以及使用在测量时间点的对应车辆位置。
[0013]
在该方法中尤其设置,将这些反射点合并成连贯的、线性延伸的壁区段。在使用将这些反射点或者说将代表所述反射点的地点概括成对象的追踪滤波器的情况下,具有长形形状的对象或经合并的反射点位于一条线上的对象被视作这种壁区段。每个壁区段具有第一端部和第二端部。一个壁区段包括至少三个反射点,优选,一个壁区段具有至少四个反射点、特别优选至少五个反射点。
[0014]
所求取的壁区段分别属于在车辆周围环境中的一个障碍物或者说对象,其中,壁区段始终是该对象轮廓的线性延伸部分。该对象可以是拉长的对象,例如护栏、墙或篱笆。或者可以是对象轮廓的一个线性部分。例如,车辆的轮廓包含这样的区段:当所述区段被超声波传感器扫描时,所述区段显现出线性和长形。该对象或者说障碍物优选是静止的。然而,该方法可以应用于动态对象、即运动对象。
[0015]
在该方法的进一步过程中,在壁区段的开放端部和闭合端部之间进行区分。在壁区段的端部闭合的情况下,壁的端部或者说对象的端部已经被探测到并且该对象在该方向上不能进一步延伸。在壁区段的端部开放的情况下,起初仅看到壁或者说对象的一部分,该对象或者说壁的完整延伸还未知。为了在开放端部和闭合端部之间进行区分而确定,在壁区段的端部区域中,紧接着或者说邻接于对应端部的反射点是否遵循非线性走势。这种非线性走势指出,已经达到了对象的线性延伸的壁区段的端部并且该对象的轮廓弯折。尤其,非线性走势是远离车辆运动方向弯曲的弯曲曲线,这种非线性走势指出对象的棱边,该棱
边是线性壁区段的端部。
[0016]
在是长形对象,例如护栏、墙或篱笆的情况下,在某些情况下不能观察到这种非线性走势。在这种情况下替代地确定,即使在车辆沿着其行驶方向进一步运动时,也不再求取另外的反射点,这些反射点可以与壁区段的对应端部合并。
[0017]
在所有其他情况下认为,壁区段的对应端部是开放的。
[0018]
如果壁区段具有一个开放端部,则现在在该方法中求取,是否面临车辆与壁区段之一之间的碰撞。为此,借助外推法延长壁区段的开放端部,并且检查在这些延长的壁区段与代表车辆预计运动的行驶通道之间的虚拟碰撞点。行驶通道由两个相互平行延伸的线代表,这些线限界了这样的区域:只要保持当前速度和方向,则所述区域预计将被车辆驶过。行驶通道取决于车辆的速度、观察方向和尺寸。如果壁区段的被执行外推法的端部之一与限界行驶通道的线相交,则在该交点处产生一个虚拟碰撞点。
[0019]
如果求取到虚拟碰撞点,则在面临与虚拟碰撞点碰撞的情况下采取制动干预。尤其当虚拟碰撞点与车辆之间的间距低于警告间距时面临碰撞。该警告间距可以根据车辆速度而变化,并且优选这样选择,使得在制动干预时即使以小的车辆减速度也确保车辆在达到虚拟碰撞点之前被制动。
[0020]
当然,除了虚拟碰撞点以外,还可以限定用于采取制动干预的其他条件。因此优选设置,在识别到位于行驶通道中的反射点时并从而在行驶通道中直接遇到障碍物时采取制动干预。
[0021]
在根据步骤f)的制动干预中优选设置,以最大减速度采取紧急制动,如果这为了避免与虚拟碰撞点的该碰撞或为了减少在碰撞时会出现的损坏是必需的。如果还不需要紧急制动,则优选,在采取制动干预时以小于车辆最大减速度的减速度实施舒适的车辆制动。通过比车辆的最大可能减速度小的这种减速度,实现了特别舒适的制动,其中,直至一定必须采取紧急制动的点的间距已减小并从而得到更多时间,以便找到壁区段的潜在闭合端部。
[0022]
优选这样选择为舒适地制动而选择的减速度,使得车辆在虚拟碰撞点之前不远处被制动直至停止。
[0023]
优选,在所述方法中设置,在采取了制动干预之后,继续观察车辆的环境、确定反射点并且将这些反射点合并成壁区段。在此可能的是,对于至今已指明有一个开放端部的壁区段,该端部被识别出并因此现在存在一个闭合端部。在这种情况下,必要时先前所求取的虚拟碰撞点消失。此外,尤其在车辆完成转向运动的情况下,重新计算虚拟碰撞点,由此,在必要时碰撞点可能消失并且可能产生新的碰撞点。
[0024]
优选,如果负责车辆减速度的虚拟碰撞点消失,则结束所采取的舒适的制动并因此也又松开被操纵的制动器。
[0025]
优选,在车辆运动期间重复以该方法的步骤a)至f)进行所述方法,使得连续地监测周围环境,必要时求取新的碰撞点并且必要时所求取的虚拟碰撞点又消失。
[0026]
本发明的另一方面是,提出一种用于避免车辆与障碍物碰撞的驾驶辅助系统。该驾驶辅助系统包括至少一个超声波传感器,用于确定车辆与车辆周围环境中的障碍物之间的间距,并且该驾驶辅助系统构造为用于实施在此所说明的方法。
[0027]
驾驶辅助系统优选包括控制器,该控制器与至少一个超声波传感器处于连接中并
且具有与车辆制动系统的连接。控制器优选实行在这里所述说明的方法。
[0028]
在一个优选的实施方式中,驾驶辅助系统具有多个超声波传感器,其中,特别优选,至少两个超声波传感器这样布置,使得其可以感知车辆周围环境中的对象的探测范围至少部分重叠。在该重叠区域中,在使用这两个超声波传感器的情况下不但可以求取对象与车辆之间的间距,而且在使用最小二乘法的情况下也可以确定该对象或者说在该对象上的反射点相对于车辆的位置。
[0029]
本发明还涉及一种包括在这里所说明的驾驶辅助系统的车辆。
[0030]
本发明的优点:
[0031]
利用所提出的方法,在许多情况下已能够求取车辆与对象的可能碰撞,尽管车辆的传感器尚未识别到伸进到车辆的行驶通道中的障碍物。这种对可能碰撞的提早识别优选用于起初轻柔地且对于乘客来说舒适地制动车辆,因为由于提早识别出面临碰撞而已可以提早地开始制动。仅当与障碍物的距离例如由于驾驶员的错误转向运动而减小得比起初预期的更快时,才需要进行完全制动或紧急制动。
[0032]
此外,例如当能证实通过识别到壁区段的端部而完全不面临碰撞,或者面临的碰撞通过驾驶员的合适转向运动而被避免时,也可以有利地又结束起初轻柔且舒适地采取的制动干预。
附图说明
[0033]
图1示出从静止障碍物旁平行驶过,和
[0034]
图2示出与静止障碍物面临碰撞。
[0035]
在下面对本发明实施例的说明中,相同的元件用相同的附图标记标注,其中,在个别情况下省去对这些元件的重复说明。附图中仅示意性地示出本发明的内容。
具体实施方式
[0036]
在图1中示出具有根据本发明的驾驶辅助系统的车辆10,该车辆沿着以参考标记36标注的方向运动。根据车辆10的运动方向36、速度和尺寸,确定行驶通道,该行驶通道被两个边界线30限界。
[0037]
在图1中所示出的实施例中,车辆10具有六个超声波传感器12,用于监测车辆10的周围环境。为此,超声波传感器12分别发送超声波脉冲并且接收在对象处反射的超声波回波。在图1中,障碍物11以静止车辆的形式示出。该障碍物11是将由超声波传感器12所发送的信号反射的对象。针对每个反射的回波,由车辆10或者说由配属于该车辆10的驾驶辅助系统来确定间距18。如果超声波传感器12能够探测到对象所处的视野至少部分重叠,则也可以借助最小二乘法来确定将超声波反射的点相对于车辆10的精确位置。为此,需要由两个参与的超声波传感器12测量的间距18以及这两个超声波传感器12之间的已知间距。
[0038]
根据所求取的超声波传感器12的传感器数据创建周围环境地图,在该周围环境地图中输入反射点14,这些反射点分别代表对应的超声波信号被障碍物11反射的地点。如果例如由于仅唯一的超声波传感器12接收了相应的回波而不能实现对反射点14的精确位置确定,则可以创建反射点14的走势,在该走势中与测量时间点和/或与由车辆10驶过的路程有关地绘出所求取的间距18。
[0039]
现在,根据该走势或根据所创建的周围环境地图,将这些反射点14概括成对象,其中,这些反射点14尤其合并成连贯的、线性延伸的壁区段20。在此,在周围环境地图中或在该走势中彼此紧密并列的反射点14被概括成壁区段20。在此,如果两个反射点14之间的间距小于预给定的阈值,则两个反射点14可以视为彼此紧密并列。
[0040]
通过合并反射点14所产生的连贯的、线性延伸的壁区段20具有两个端部。在图1中示出的示例中,两个端部是闭合端部26,因为紧接着闭合端部26的对应反射点14不进一步遵循壁区段20的其余反射点14的直线走势,而是进一步远离车辆10。
[0041]
由于壁区段20的两个端部是闭合的,所以对壁区段20的进一步走势不进行外推法。因为限界出车辆10的行驶通道的两个边界线30也不与壁区段20相交,所以不能求取出碰撞点。该壁区段不面临车辆10与障碍物11之间的碰撞。
[0042]
在图2中示出与图1中类似的状况。车辆10沿着用参考标记36标注的方向运动,其中,车辆10的行驶通道又被两个边界线30限界。与图1中所示出的状况不同,车辆10不再与障碍物11平行地运动,而是相对于该障碍物以一定角度运动。
[0043]
在车辆10运动期间,用超声波传感器12连续地发送信号并且又接收回波,其中,又给每个回波配属一个间距18,并且反射点14被确定。
[0044]
如从图2的图示中可以看出那样,所求取的反射点14被概括成壁区段20,该壁区段具有一个闭合端部26。闭合端部26的特征又在于,紧接着该闭合端部26的反射点14相对于车辆10的间距18增大了,使得与闭合端部26邻接的反射点14的位置不遵循线性走势。与闭合端部26邻接的反射点14不位于穿过配属于壁区段20的反射点14的直线上。
[0045]
壁区段20的另一端部是开放端部24,因为在开放端部附近的所有至今所求取的反射点14位于被壁区段20的所有反射点14限定的直线上。因此,实施外推法,使得通过被执行外推法的直线28来估计壁区段20的进一步走势。在图2的图示中,被执行外推法的直线28与限界出车辆10的行驶通道的边界线30之一相交。在交点处形成虚拟碰撞点32。车辆10与虚拟碰撞点32之间的间距用附图标记34标注。
[0046]
基于对虚拟碰撞点32的识别来进行制动干预,其中,优选轻柔且舒适地制动车辆10。为了舒适的制动,这样选择减速度,使得车辆10在虚拟碰撞点32之前不远处停止。如果车辆10的驾驶员通过转向运动这样改变车辆10的运动方向36,使得虚拟碰撞点32消失,则结束制动干预,使得车辆10的行驶可以不受干扰地继续进行。
[0047]
以有利的方式,在使用超声波传感器12情况下求取到位于车辆10的行驶通道内的反射点14之前,已识别到虚拟碰撞点32。通过这种对虚拟碰撞点32的提早识别可以较早地开始制动干预,并且因此以较小的、舒适的减速度进行制动。
[0048]
如果车辆10与障碍物11之间的角度较小,使得虚拟碰撞点32进一步远离障碍物11且位于该障碍物以外,则在舒适制动期间,车辆10在使用它的超声波传感器12的情况下进一步确定反射点14并且进一步将它们概括成壁区段20。如果然后在进一步的走势中达到障碍物11的端部,则会求取到反射点14关于穿过配属于壁区段20的反射点14的直线而言的非线性走势。这会被解释为壁区段20的闭合端部26,使得不进行对被执行外推法的直线28的确定,并从而虚拟碰撞点32也消失。这意味着,在这种情况下,车辆10起初会谨慎地制动,直至超声波传感器12识别到壁区段20的端部为闭合的,并从而识别到障碍物11的端部。因为然后可以排除面临的碰撞,所以车辆10在这种情况下不受妨碍地继续它的行驶,并且舒适
的制动结束。
[0049]
本发明不限于这里所说明的实施例和其中所强调的方面。更确切地说,在由权利要求给出的范围内能实现处于本领域技术人员惯用技术手段范畴内的多种变型。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 超声波传感器

 热门咨询
热门咨询




tips